
基于双微控制器的缩微智能车设计及路径跟踪控制的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双微控制器的缩微智能车设计及路径跟踪控制的任务书.docx
基于双微控制器的缩微智能车设计及路径跟踪控制的任务书一、任务背景随着科学技术的不断进步,机械自动化技术已经成为现代社会的重要组成部分。智能车可以实现远程控制、自主导航、自动避障等功能,具有广泛的应用场景。因此,设计一款基于双微控制器的缩微智能车并实现路径跟踪控制,对于机械自动化领域的研究和发展具有重要意义。二、任务目标1.设计一款基于双微控制器的缩微智能车,包括电路设计与机械设计。2.实现路径跟踪控制功能,包括设计算法、进行仿真和实现实际控制。三、任务内容1.电路设计(1)设计电机驱动电路,控制智能车的前

基于Pure Pursuit算法的智能缩微车路径跟踪.pptx
基于PurePursuit算法的智能缩微车路径跟踪目录添加章节标题PurePursuit算法介绍算法基本原理算法特点算法应用场景算法优缺点智能缩微车的路径跟踪系统系统组成系统工作原理系统实现方式系统优缺点PurePursuit算法在智能缩微车路径跟踪中的应用算法在路径跟踪中的重要性算法在路径跟踪中的实现方式算法在路径跟踪中的优化策略算法在路径跟踪中的效果评估智能缩微车路径跟踪的未来发展技术发展趋势应用领域拓展未来发展方向技术挑战与机遇THANKYOU

基于双微控制器的移动机器人设计及路径跟踪控制的任务书.docx
基于双微控制器的移动机器人设计及路径跟踪控制的任务书任务书任务名称:基于双微控制器的移动机器人设计及路径跟踪控制任务目的:本任务旨在设计一款移动机器人,并实现其路径跟踪控制。移动机器人完成了自主导航系统、自我定位和环境感知等功能,这使得它能够在各种环境下智能地探索和执行任务。本任务的主要目标是设计一个具有双微控制器的移动机器人,并掌握其路径跟踪控制技术。任务内容:1.机器人硬件设计基于双微控制器设计控制核心板,包括电机驱动、传感器采集及通信模块等。设计并制造移动机器人底盘,应具备足够的稳定性和可靠性。根据

基于缩微车的智能驾驶设计与研究.docx
基于缩微车的智能驾驶设计与研究摘要智能驾驶技术是实现自主驾驶的核心技术之一,已成为汽车行业的热门研究方向。缩微车是一种新型的微型智能车辆,尺寸小、功耗低,适合大规模应用。本文基于缩微车的智能驾驶设计与研究进行了探讨。首先,介绍了智能驾驶技术的发展历程及现状;然后,阐述了缩微车的技术特点和应用前景;接着,详细论述了缩微车智能驾驶系统的架构和关键技术;最后,从安全、经济等方面分析了缩微车智能驾驶的优势。关键词:智能驾驶;缩微车;驾驶系统AbstractIntelligentdrivingtechnologyi
基于clothoid曲线的智能车路径跟踪控制方法.pdf
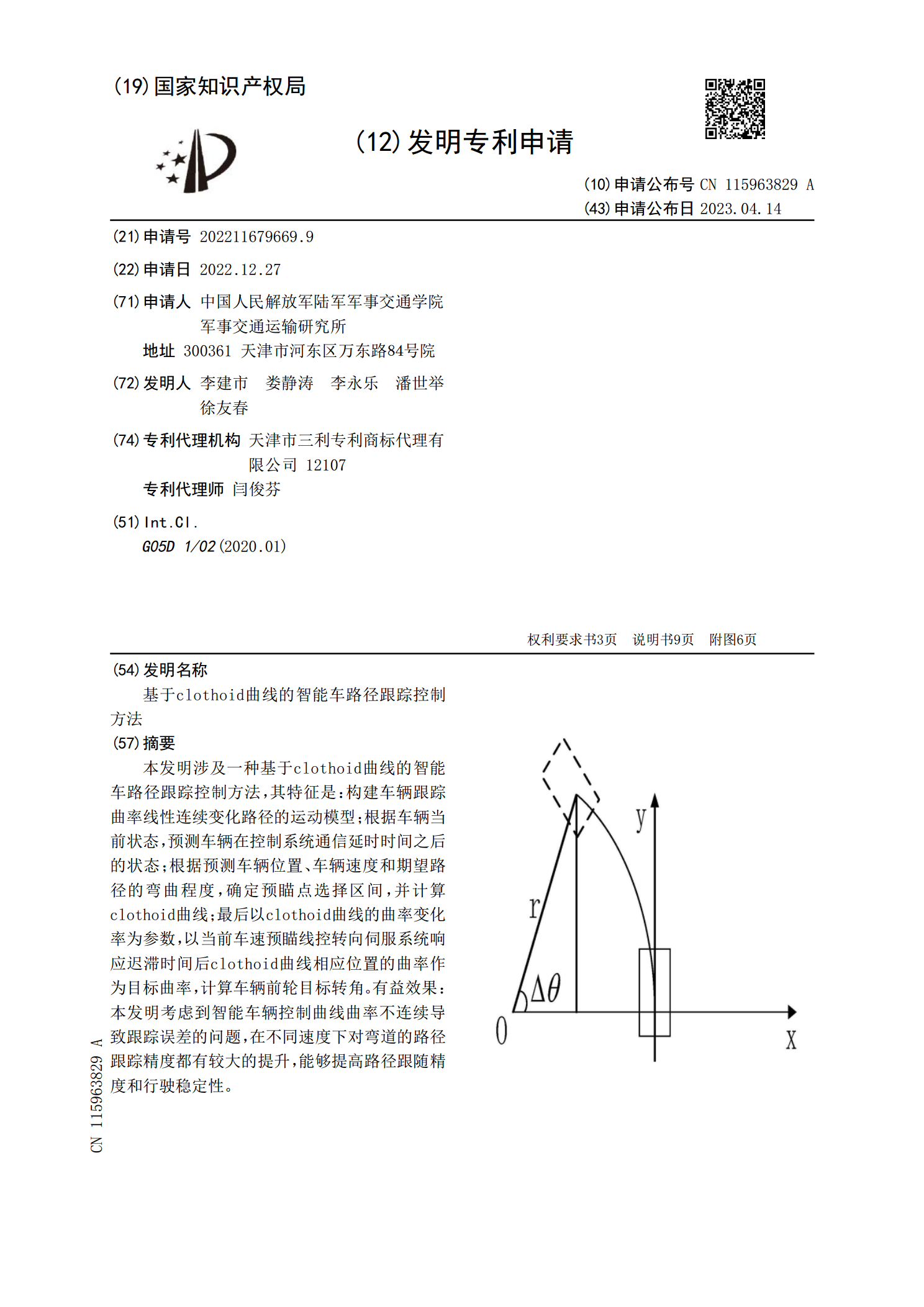
本发明涉及一种基于clothoid曲线的智能车路径跟踪控制方法,其特征是:构建车辆跟踪曲率线性连续变化路径的运动模型;根据车辆当前状态,预测车辆在控制系统通信延时时间之后的状态;根据预测车辆位置、车辆速度和期望路径的弯曲程度,确定预瞄点选择区间,并计算clothoid曲线;最后以clothoid曲线的曲率变化率为参数,以当前车速预瞄线控转向伺服系统响应迟滞时间后clothoid曲线相应位置的曲率作为目标曲率,计算车辆前轮目标转角。有益效果:本发明考虑到智能车辆控制曲线曲率不连续导致跟踪误差的问题,在不同速