
基于clothoid曲线的智能车路径跟踪控制方法.pdf

努力****绮亦


1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于clothoid曲线的智能车路径跟踪控制方法.pdf
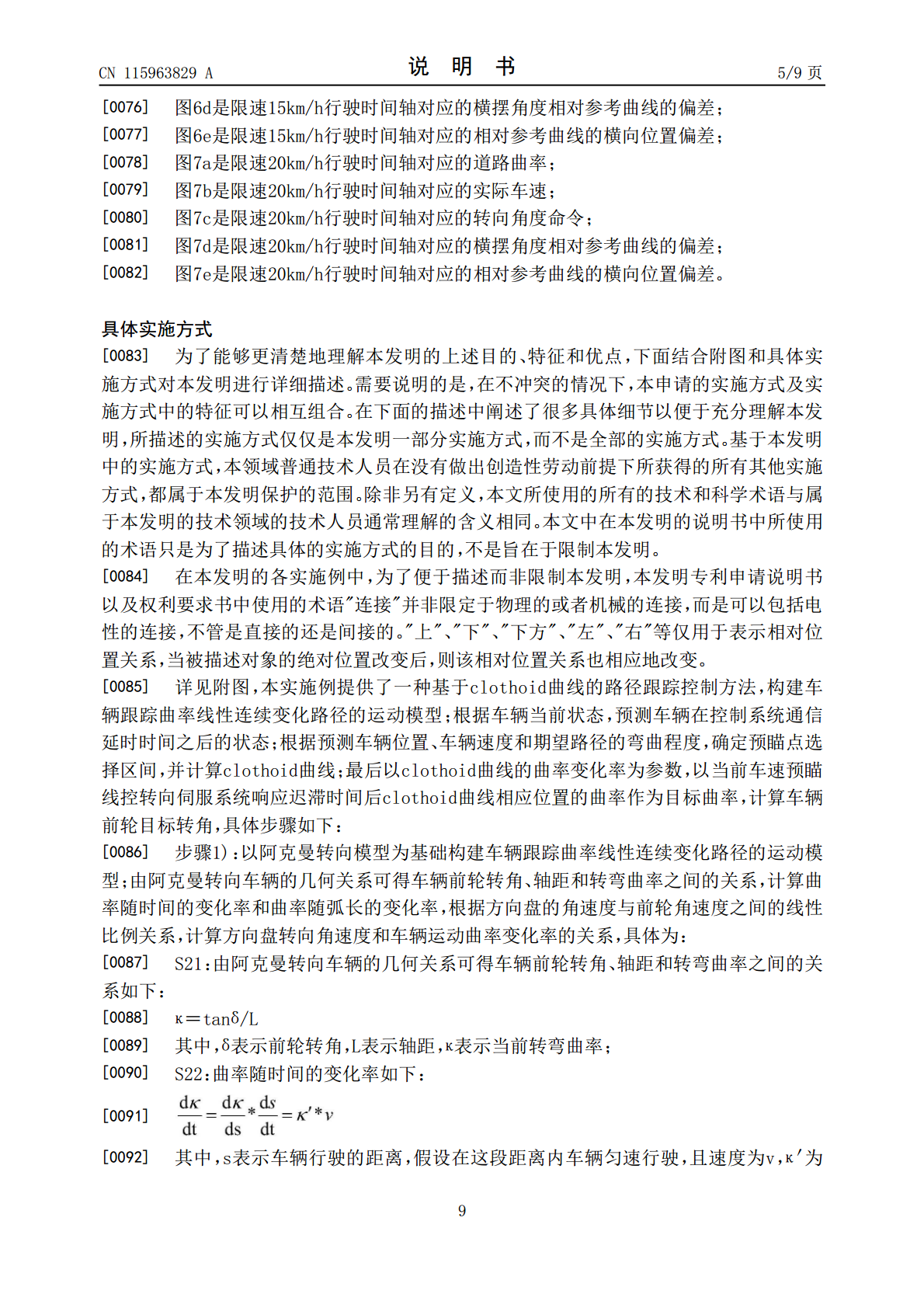
本发明涉及一种基于clothoid曲线的智能车路径跟踪控制方法,其特征是:构建车辆跟踪曲率线性连续变化路径的运动模型;根据车辆当前状态,预测车辆在控制系统通信延时时间之后的状态;根据预测车辆位置、车辆速度和期望路径的弯曲程度,确定预瞄点选择区间,并计算clothoid曲线;最后以clothoid曲线的曲率变化率为参数,以当前车速预瞄线控转向伺服系统响应迟滞时间后clothoid曲线相应位置的曲率作为目标曲率,计算车辆前轮目标转角。有益效果:本发明考虑到智能车辆控制曲线曲率不连续导致跟踪误差的问题,在不同速

智能车路径跟踪及其底层控制方法研究.docx
智能车路径跟踪及其底层控制方法研究智能车路径跟踪及其底层控制方法研究摘要:随着科技的不断发展,智能车已经成为了人们对未来交通的向往和发展方向。对于智能车来说,路径跟踪是其中的一个重要问题。本文主要探讨了智能车路径跟踪的基本原理和底层控制方法,重点介绍了PID控制算法及其在路径跟踪中的应用。一、引言智能车是一种集成了计算机、传感器、控制器等多种技术的现代化交通工具,具有自主导航、避障、自动停车等功能,是未来交通发展的重要方向。而路径跟踪是智能车中的一个重要问题,不仅关系到智能车的安全性能,还涉及到智能车的行

基于滑模自抗扰的智能车路径跟踪控制.docx
基于滑模自抗扰的智能车路径跟踪控制基于滑模自抗扰的智能车路径跟踪控制摘要:智能车路径跟踪控制是自动驾驶技术中的重要问题之一。为了提高智能车的路径跟踪性能和鲁棒性,本文提出了一种基于滑模自抗扰控制的路径跟踪控制方法。该方法通过设计滑模控制器实现对路径跟踪误差的精确控制,同时采用自抗扰控制策略抑制外部扰动的影响。仿真结果验证了该控制方法的有效性和优越性。关键词:智能车,路径跟踪控制,滑模控制,自抗扰控制引言:智能车作为自动驾驶技术的一种典型应用,已经成为当前热门的研究领域。在实际应用中,智能车需要精确地跟踪路

智能车局部路径规划及路径跟踪方法研究.docx
智能车局部路径规划及路径跟踪方法研究智能车局部路径规划及路径跟踪方法研究摘要:随着智能车领域的快速发展,局部路径规划和路径跟踪成为智能车自主驾驶的重要核心技术。本论文通过综述相关研究文献和方法,研究了智能车局部路径规划和路径跟踪的主要方法及其优缺点。首先,介绍了智能车局部路径规划的基本概念和目标。然后,介绍了局部路径规划方法中最著名的A*算法、动态窗口方法和模型预测控制方法。接着,研究了智能车路径跟踪方法中的模型预测控制算法、逻辑回归方法和PID控制方法。最后,总结了智能车局部路径规划和路径跟踪的研究现状
一种纯跟踪智能车路径跟随控制方法.pdf
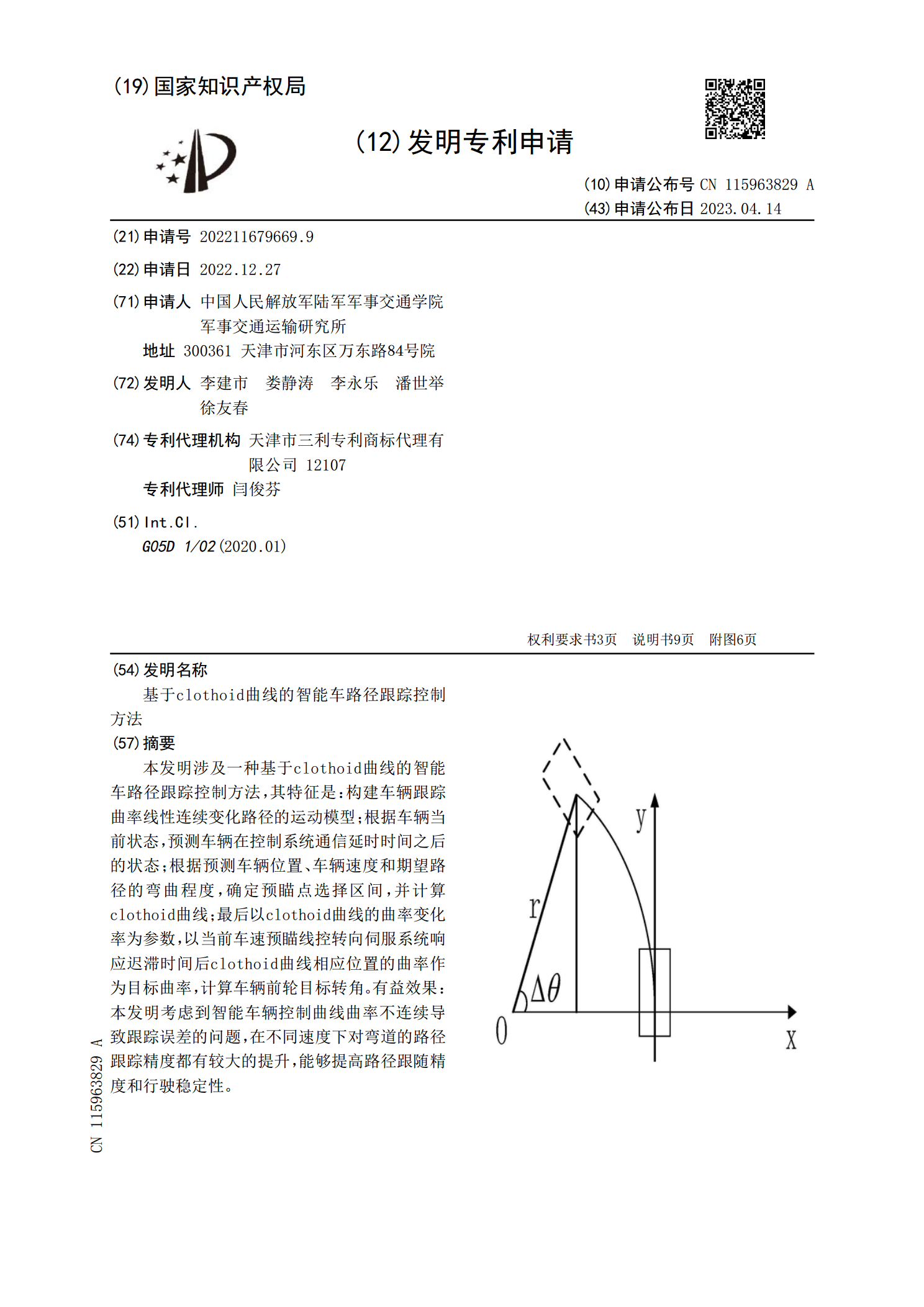
本发明涉及一种纯跟踪智能车路径跟随控制方法,包括根据预瞄距离、期望路径、车辆状态,计算期望前轮转角;计算车辆与期望路径的横向偏差、航向偏差;根据上述横向偏差、航向偏差,计算转角补偿;将上述期望前轮转角、转角补偿相加,得到前轮转角控制量。有益效果:本发明在传统纯跟踪算法的基础上,考虑到智能车辆与期望路径的实时航向偏差,加快消除初始偏差,减小振荡,提高路径跟随精度,满足智能车的要求达到应用的要求。