
基于sEMG的下肢外骨骼机器人意图识别与人机交互的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于sEMG的下肢外骨骼机器人意图识别与人机交互的任务书.docx
基于sEMG的下肢外骨骼机器人意图识别与人机交互的任务书一、任务背景随着社会的发展,科技的不断进步,机器人技术在生产、军事、医疗等领域都得到了广泛应用,能够为人类提供便捷、高效的服务。而在医疗领域,下肢外骨骼机器人已经成为重要的康复辅助装备,为残疾人士提供了一定的帮助。但是,由于这些机器人需要与人体相结合,因此如何实现人机交互和意图识别已经成为了下肢外骨骼机器人研究的热点问题。肌电信号(sEMG)是人体肌肉活动产生的电信号,可以通过肌肉电位检测器获取。sEMG信号可以被用来作为人体肌肉活动的信息源,因此这

基于sEMG的多自由度下肢外骨骼康复机器人结构与控制策略.docx
基于sEMG的多自由度下肢外骨骼康复机器人结构与控制策略目录一、内容描述................................................21.研究背景及意义........................................32.国内外研究现状........................................4二、基于sEMG的下肢外骨骼康复机器人结构......................51.机器人整体结构设计...............

基于sEMG与交互力等多源信号融合的下肢外骨骼康复机器人及其临床实验研究综述报告.docx
基于sEMG与交互力等多源信号融合的下肢外骨骼康复机器人及其临床实验研究综述报告标题:基于sEMG与交互力等多源信号融合的下肢外骨骼康复机器人及其临床实验研究综述报告摘要:下肢功能障碍是常见的康复问题,对患者的生活质量和日常活动能力产生了严重影响。鉴于传统的康复方法存在局限性,下肢外骨骼康复机器人逐渐成为一个研究热点。本报告综述了基于表面肌电信号(sEMG)和交互力等多源信号融合的下肢外骨骼康复机器人及其临床实验研究,为该领域的进一步发展提供参考。关键词:下肢外骨骼康复机器人;sEMG信号;交互力;多源信
下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人.pdf
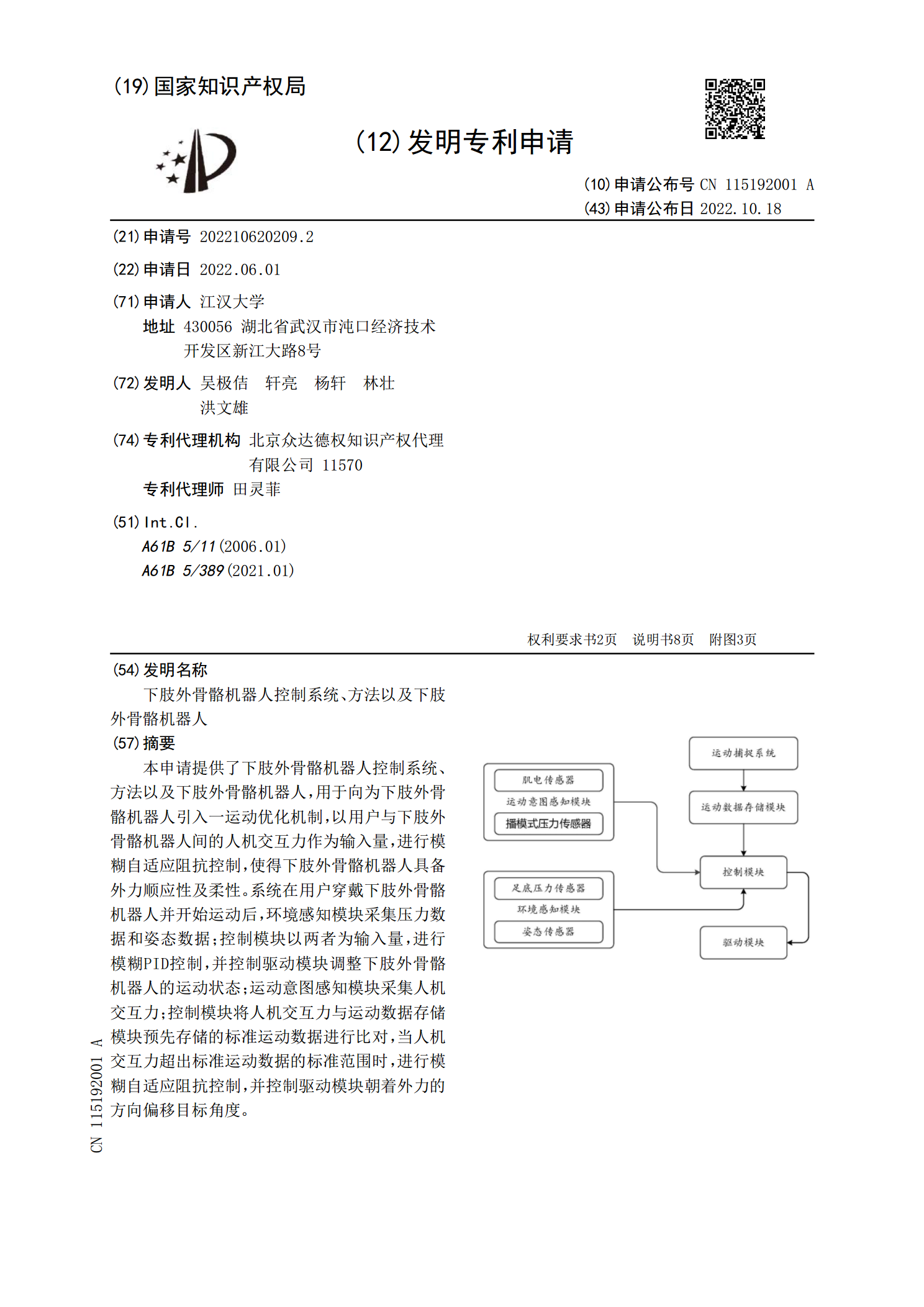
本申请提供了下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人,用于向为下肢外骨骼机器人引入一运动优化机制,以用户与下肢外骨骼机器人间的人机交互力作为输入量,进行模糊自适应阻抗控制,使得下肢外骨骼机器人具备外力顺应性及柔性。系统在用户穿戴下肢外骨骼机器人并开始运动后,环境感知模块采集压力数据和姿态数据;控制模块以两者为输入量,进行模糊PID控制,并控制驱动模块调整下肢外骨骼机器人的运动状态;运动意图感知模块采集人机交互力;控制模块将人机交互力与运动数据存储模块预先存储的标准运动数据进行比对,当人机交互力超

下肢外骨骼机器人的设计与研究的任务书.docx
下肢外骨骼机器人的设计与研究的任务书任务书一、任务背景下肢外骨骼机器人是一种新型的人机交互机器人,可以协助人类完成移动、站立等操作,有着重要的应用价值和市场潜力。但目前国内关于该领域的研究还处于起步阶段,需要进行更深入的探索和研究。因此,本次设计研究的目的是开发一款结构合理、性能优良的下肢外骨骼机器人,以实现对人体行动的协助和改善,同时提高机器人在实际应用中的稳定性和可操作性。二、任务内容1.研究下肢外骨骼机器人的相关理论知识和技术方法;2.设计并搭建下肢外骨骼机器人的完整结构;3.筛选合适的动力源,探究