
下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人.pdf

子璇****君淑

1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人.pdf
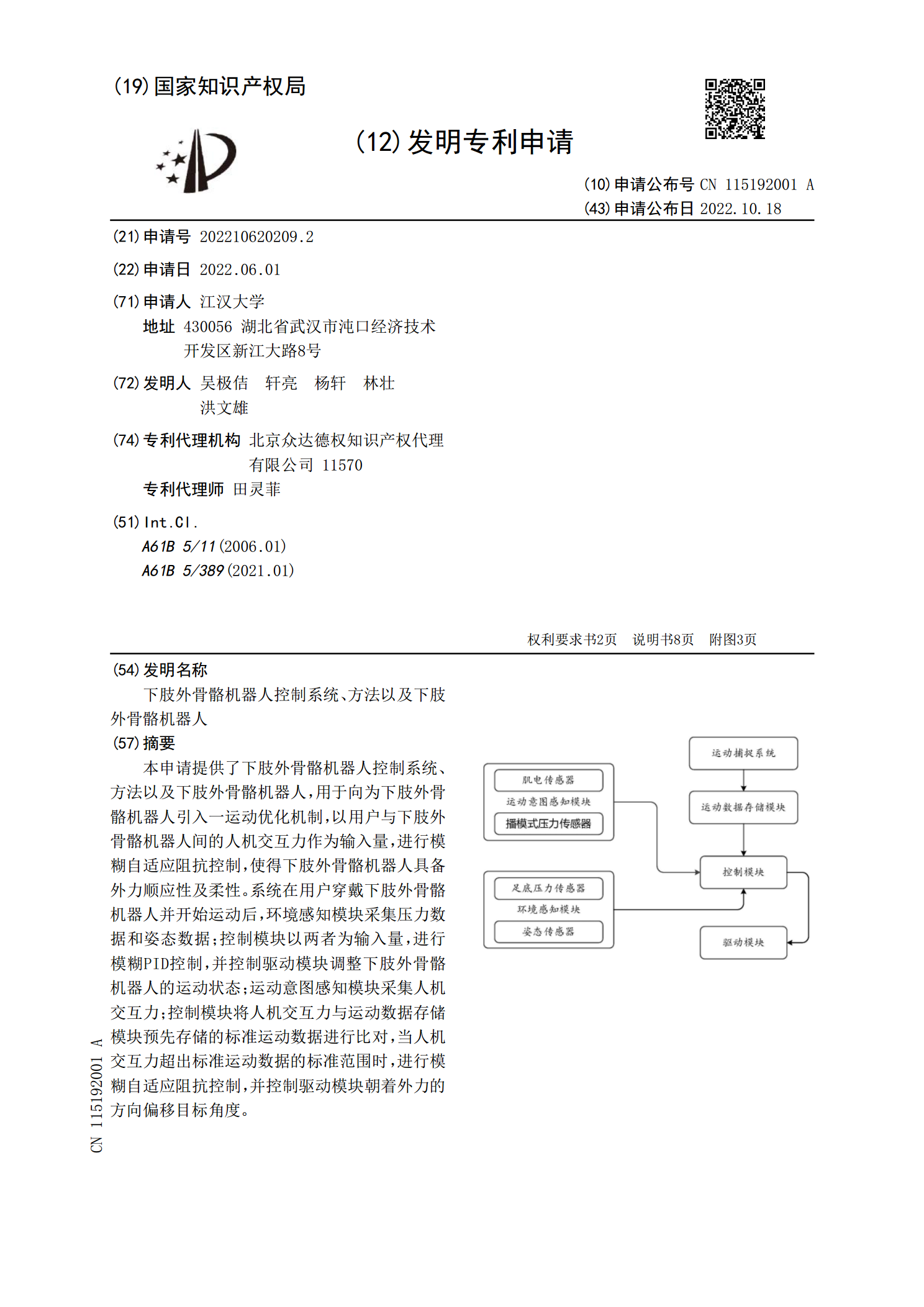
本申请提供了下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人,用于向为下肢外骨骼机器人引入一运动优化机制,以用户与下肢外骨骼机器人间的人机交互力作为输入量,进行模糊自适应阻抗控制,使得下肢外骨骼机器人具备外力顺应性及柔性。系统在用户穿戴下肢外骨骼机器人并开始运动后,环境感知模块采集压力数据和姿态数据;控制模块以两者为输入量,进行模糊PID控制,并控制驱动模块调整下肢外骨骼机器人的运动状态;运动意图感知模块采集人机交互力;控制模块将人机交互力与运动数据存储模块预先存储的标准运动数据进行比对,当人机交互力超

下肢助行外骨骼机器人的控制方法及外骨骼机器人.pdf
本发明提供了一种下肢助行外骨骼机器人的控制方法及外骨骼机器人,其中,控制方法,包括:检测腿部关节的角度;检测外骨骼机器人和用户的整体的质心的位置;检测步行过程中足底的压力,包括右腿足底承受的第一压力F

下肢辅助外骨骼机器人的传动方法.pdf
本发明公开了一种下肢辅助外骨骼机器人及其传动方法。其中,该机器人的传动方法主要由齿轮传动,使用齿轮传动中的曲线齿锥齿轮传动方式。该传动方式主要用于膝关节和髋关节的运动。在主控板的控制下由驱动器驱动电机做出相应转动,电机的转动再由一组曲线齿锥齿轮传动,驱动相关关节转动使机器运动。其中,外骨骼机器人所使用的锥齿轮组与电机连接的齿轮是小号的齿轮,小齿轮驱动大齿轮。

下肢外骨骼机器人的设计与研究.pptx
添加副标题目录PART01PART02背景介绍研究意义国内外研究现状研究目的与问题PART03设计理念与原则结构设计材料选择与加工工艺控制系统设计实验验证与测试PART04在医疗康复领域的应用在军事领域的应用在工业领域的应用推广策略与市场前景PART05技术挑战与解决方案未来发展方向与趋势对未来研究的建议与展望PART06研究成果总结研究不足与局限性对未来研究的建议与展望感谢您的观看
导向机构、下肢康复外骨骼和外骨骼机器人.pdf
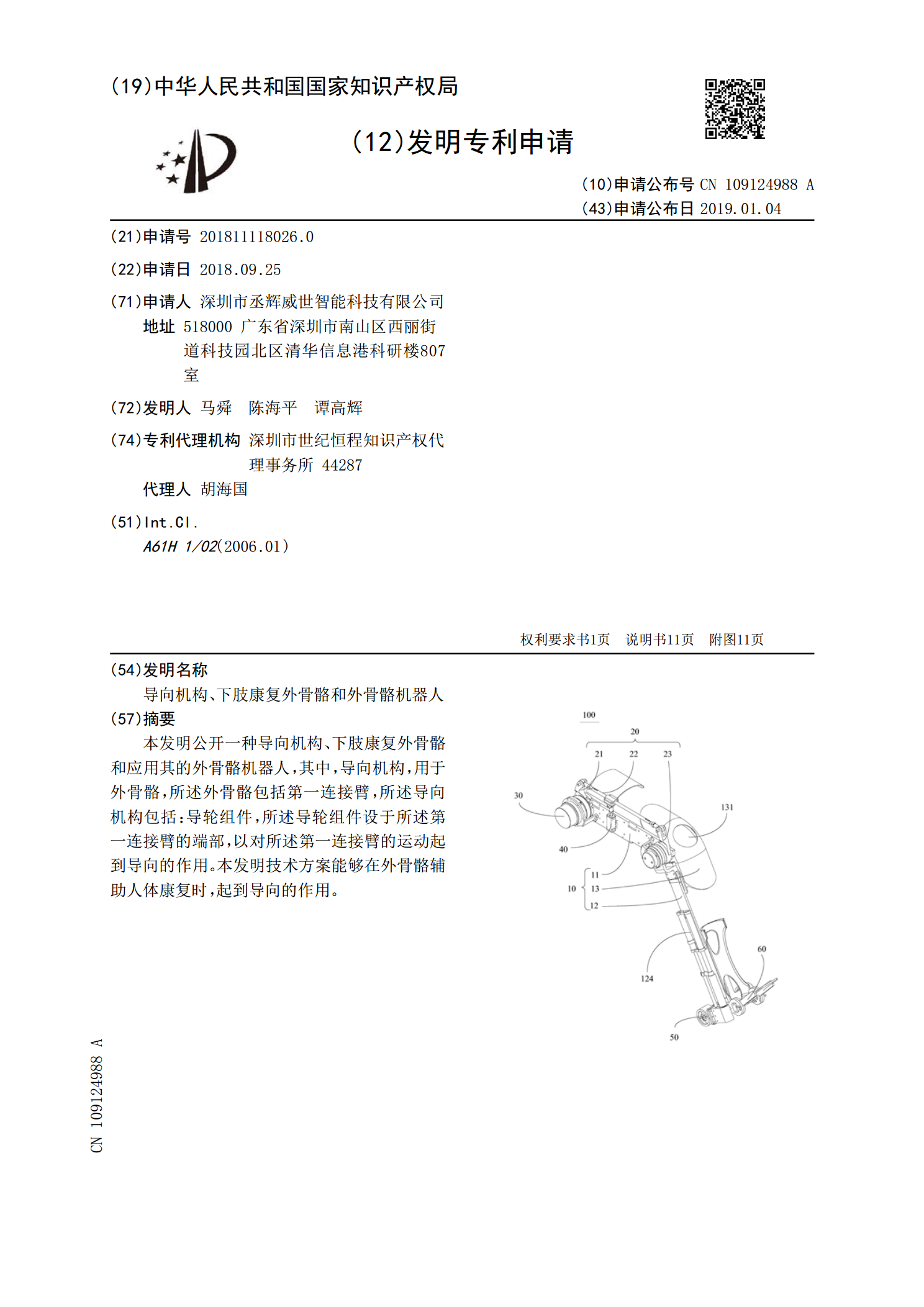
本发明公开一种导向机构、下肢康复外骨骼和应用其的外骨骼机器人,其中,导向机构,用于外骨骼,所述外骨骼包括第一连接臂,所述导向机构包括:导轮组件,所述导轮组件设于所述第一连接臂的端部,以对所述第一连接臂的运动起到导向的作用。本发明技术方案能够在外骨骼辅助人体康复时,起到导向的作用。