
铰接转向式履带车关键控制技术研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

铰接转向式履带车关键控制技术研究的任务书.docx
铰接转向式履带车关键控制技术研究的任务书任务书一、项目标题铰接转向式履带车关键控制技术研究二、项目背景随着工业化进程的不断加快,现代工业已经越来越依赖各类机械设备的运行维护,其中又以车辆运输设备为主。随着工程机械行业的不断发展,履带式运输车辆作为工程机械的代表之一,在市场上得到了广泛的应用。而在履带式运输车辆的类型中,铰接转向式的履带车具有更高的适应性和灵活性,更能满足复杂工程施工现场的需求。因此,对于铰接转向式履带车的控制技术研究,不仅是目前工程机械行业发展的必要方向之一,也是当前重要产业的支撑保证。三

铰接转向式履带车关键控制技术研究的开题报告.docx
铰接转向式履带车关键控制技术研究的开题报告一、选题背景铰接转向式履带车是一种常见的工程机械设备,具有强大的工作能力,广泛应用于矿山、建筑、水利、公路等行业。它具有良好的悬挂适应性和行驶稳定性,能够适应各种复杂的道路和地形条件。在现代工程机械的发展中,越来越多的铰接转向式履带车采用了自动控制技术,为提高工作效率、降低故障率、保障工作安全提供了关键技术支持。二、选题意义随着科技的发展和机械设备的智能化程度不断提高,铰接转向式履带车控制技术已经成为工程机械制造和研发领域的热门话题。在工程机械行业内,铰接转向式履

铰接式履带车预定路径行走控制研究的任务书.docx
铰接式履带车预定路径行走控制研究的任务书任务书课题名称:铰接式履带车预定路径行走控制研究一、课题背景和目的随着现代工程建设的快速发展,工地作业需要大量的工程设备。其中,铰接式履带车作为一种重要的工程机械设备,广泛应用于建筑、矿山、道路施工等领域。然而,由于工地的复杂环境以及操作人员的技术水平参差不齐,铰接式履带车在行走过程中存在一定的操控困难和安全隐患。因此,本课题旨在通过研究铰接式履带车预定路径行走控制,提高铰接式履带车的操控性能和安全性,提高工地施工效率,并减少事故发生的可能。二、研究内容和主要任务1
分布式电驱动铰接转向履带车辆.pdf
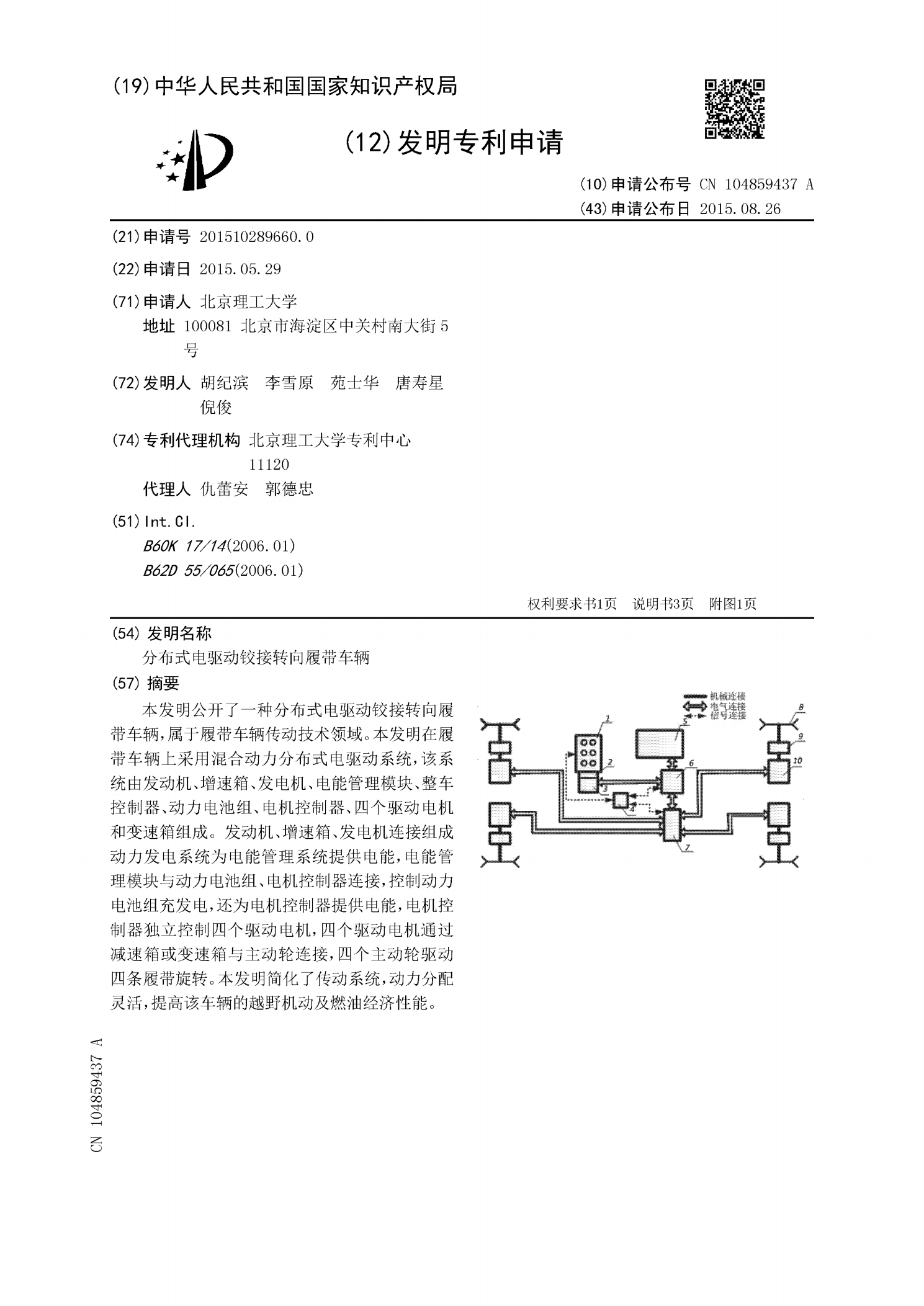
本发明公开了一种分布式电驱动铰接转向履带车辆,属于履带车辆传动技术领域。本发明在履带车辆上采用混合动力分布式电驱动系统,该系统由发动机、增速箱、发电机、电能管理模块、整车控制器、动力电池组、电机控制器、四个驱动电机和变速箱组成。发动机、增速箱、发电机连接组成动力发电系统为电能管理系统提供电能,电能管理模块与动力电池组、电机控制器连接,控制动力电池组充发电,还为电机控制器提供电能,电机控制器独立控制四个驱动电机,四个驱动电机通过减速箱或变速箱与主动轮连接,四个主动轮驱动四条履带旋转。本发明简化了传动系统,动

铰接式履带车预定路径行走控制研究的开题报告.docx
铰接式履带车预定路径行走控制研究的开题报告一、选题背景铰接式履带车是一种具有良好通过性能和载重能力的重型机械装备,被广泛应用于建筑、采矿、水利等领域,对其中一些作业场合来说,要求机器能够按照预定路径行走。传统的手动操纵操作方式虽然可行,但效率低下且易出错,随着智能化技术的发展,利用机器控制来完成路径行走更具有优势。目前,铰接式履带车路径行走控制方案已有多种研究,常见的如遥控操作、自动导航、机器视觉等。但每种方案都存在一些局限性和不足之处,例如,遥控操作易受干扰,距离和环境限制大;自动导航需要额外的导航设备