
轮毂电机驱动的纯电动汽车避撞控制系统研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮毂电机驱动的纯电动汽车避撞控制系统研究.docx
轮毂电机驱动的纯电动汽车避撞控制系统研究轮毂电机驱动的纯电动汽车避撞控制系统研究摘要:随着纯电动汽车的快速发展,车辆的安全性变得越来越重要。避撞控制系统是提高车辆安全性的一个关键方面。本文旨在研究轮毂电机驱动的纯电动汽车避撞控制系统,探讨其原理和应用。通过对避撞控制系统的技术特点、工作原理以及实际应用的分析,提出了一种基于轮毂电机驱动的纯电动汽车避撞控制系统的设计方案,并对其性能和效果进行了评估。实验结果表明,该系统能够有效地提高纯电动汽车的安全性能,降低交通事故发生的概率,为纯电动汽车的普及和推广提供了

轮毂电机驱动的纯电动汽车避撞控制系统研究的任务书.docx
轮毂电机驱动的纯电动汽车避撞控制系统研究的任务书一、研究背景纯电动汽车作为一种新型交通工具,其节能环保、无污染、零排放等特点备受关注,逐渐成为人们出行的选择。然而,与传统燃油车相比,纯电动汽车在安全性方面仍然存在挑战。其中,避撞控制是纯电动汽车安全性能的重要组成部分。目前,主流的避撞控制系统为ABS(防抱死制动系统)和电子稳定控制系统,这些系统能够在紧急情况下控制车辆的刹车和转向,以确保车辆的稳定性和安全性。然而,这些系统都是基于传统的机械、液压或电控元件实现的。随着轮毂电机技术的发展,越来越多的研究者开

基于轮毂电机的纯电动汽车驱动防滑控制系统及方法.pdf
本发明提供一种基于轮毂电机的纯电动汽车驱动防滑控制方法,获取左前轮、右前轮、左后轮和右后轮的轮速,判断左前轮、右前轮的轮速差值是否小于或等于150r/min,是则取左前轮轮速w1作为前轮目标转速,否则取较小者为前轮目标转速;同理算出后轮目标转速M_Speed_R;二者比较得到整车的目标转速;分别将4个车轮的轮速与整车的目标转速对比,当判断该车轮有飞转的趋势,则降低发送给该车轮的轮毂电机控制器的力矩命令;当4个车轮的轮速均在合理范围内,则发送给各个轮毂电机控制器的力矩命令恢复为由驾驶员意图决定其大小的模式,
两轮轮毂电机驱动纯电动汽车整车控制器及控制方法.pdf
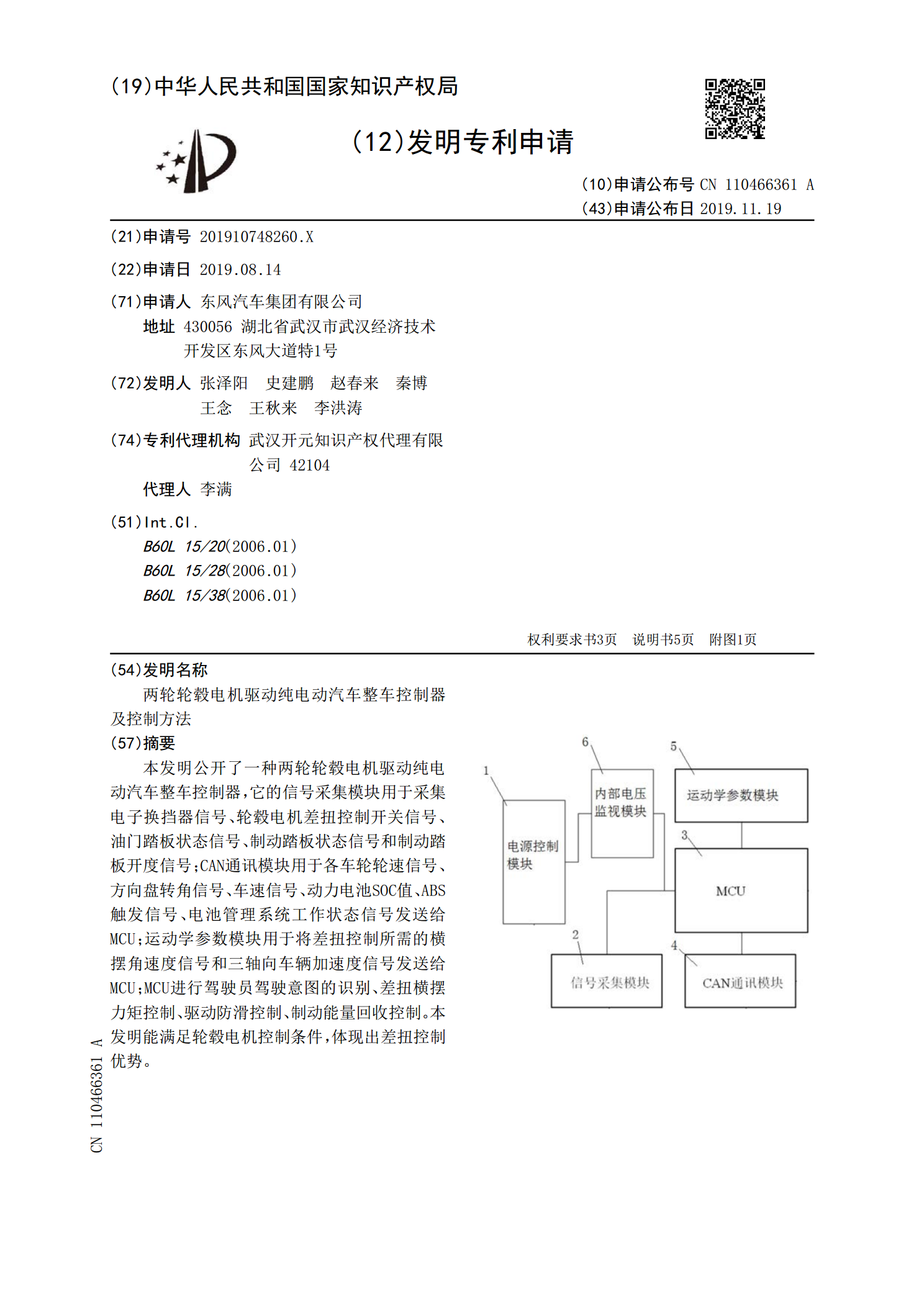
本发明公开了一种两轮轮毂电机驱动纯电动汽车整车控制器,它的信号采集模块用于采集电子换挡器信号、轮毂电机差扭控制开关信号、油门踏板状态信号、制动踏板状态信号和制动踏板开度信号;CAN通讯模块用于各车轮轮速信号、方向盘转角信号、车速信号、动力电池SOC值、ABS触发信号、电池管理系统工作状态信号发送给MCU;运动学参数模块用于将差扭控制所需的横摆角速度信号和三轴向车辆加速度信号发送给MCU;MCU进行驾驶员驾驶意图的识别、差扭横摆力矩控制、驱动防滑控制、制动能量回收控制。本发明能满足轮毂电机控制条件,体现出差

纯电动汽车驱动控制系统研究的任务书.docx
纯电动汽车驱动控制系统研究的任务书一、选题背景近年来,随着人们环保意识的提高以及政府环保政策的推行,纯电动汽车逐渐成为了汽车行业的一个热门话题。与传统内燃机汽车相比,纯电动汽车具有零排放、静音、低成本等优势,同时也对提高能源利用效率有着积极的促进作用。然而,由于电动汽车的动力系统不同于传统内燃机汽车,其驱动控制系统的设计与优化面临着一定的困难。因此,纯电动汽车驱动控制系统研究成为了当前汽车行业的热门课题。二、选题目的和意义1.探究电动汽车驱动控制系统的设计及调试方法。纯电动汽车的驱动控制系统(包括电机控制