
两轮轮毂电机驱动纯电动汽车整车控制器及控制方法.pdf

书生****写意

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
两轮轮毂电机驱动纯电动汽车整车控制器及控制方法.pdf
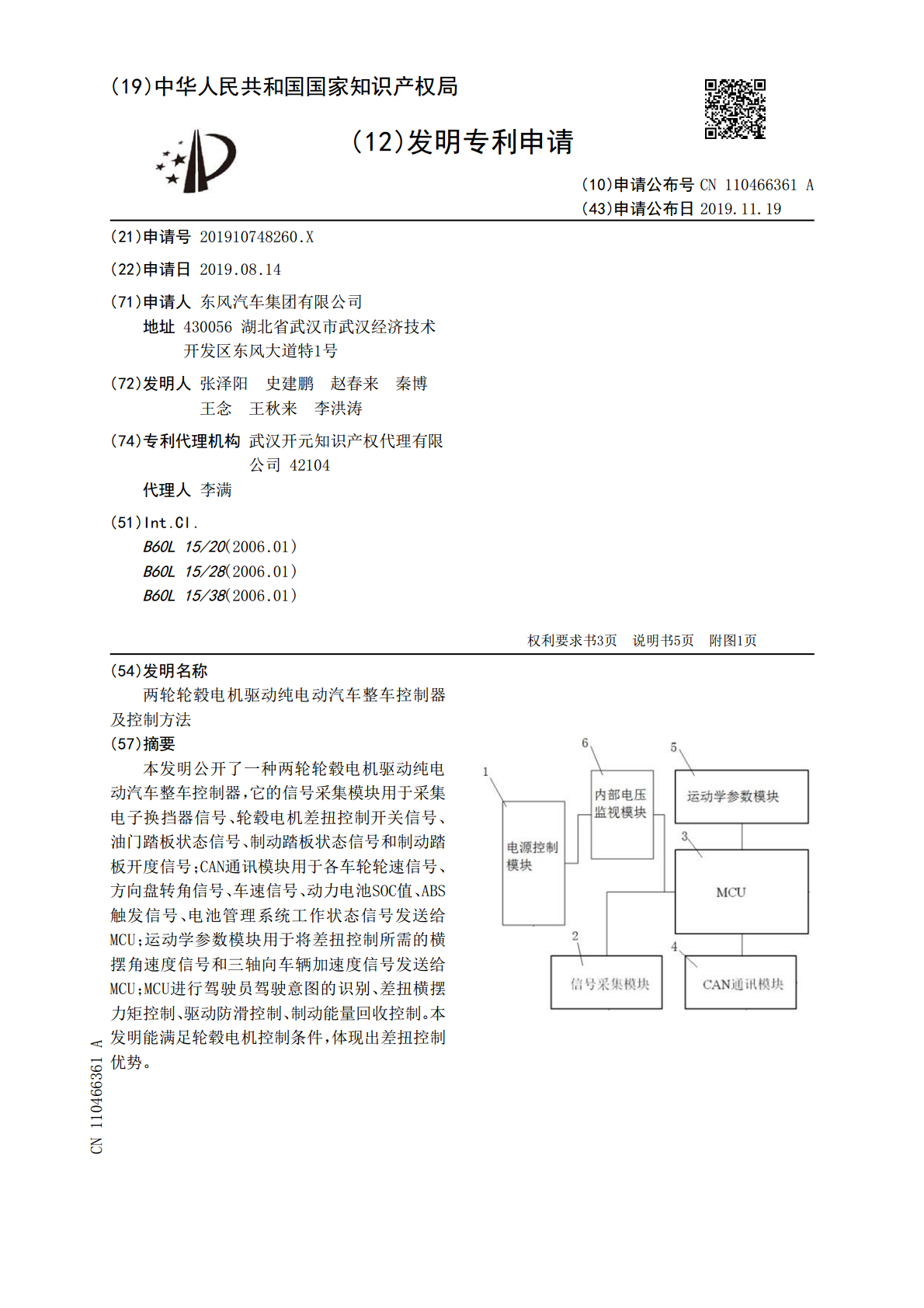
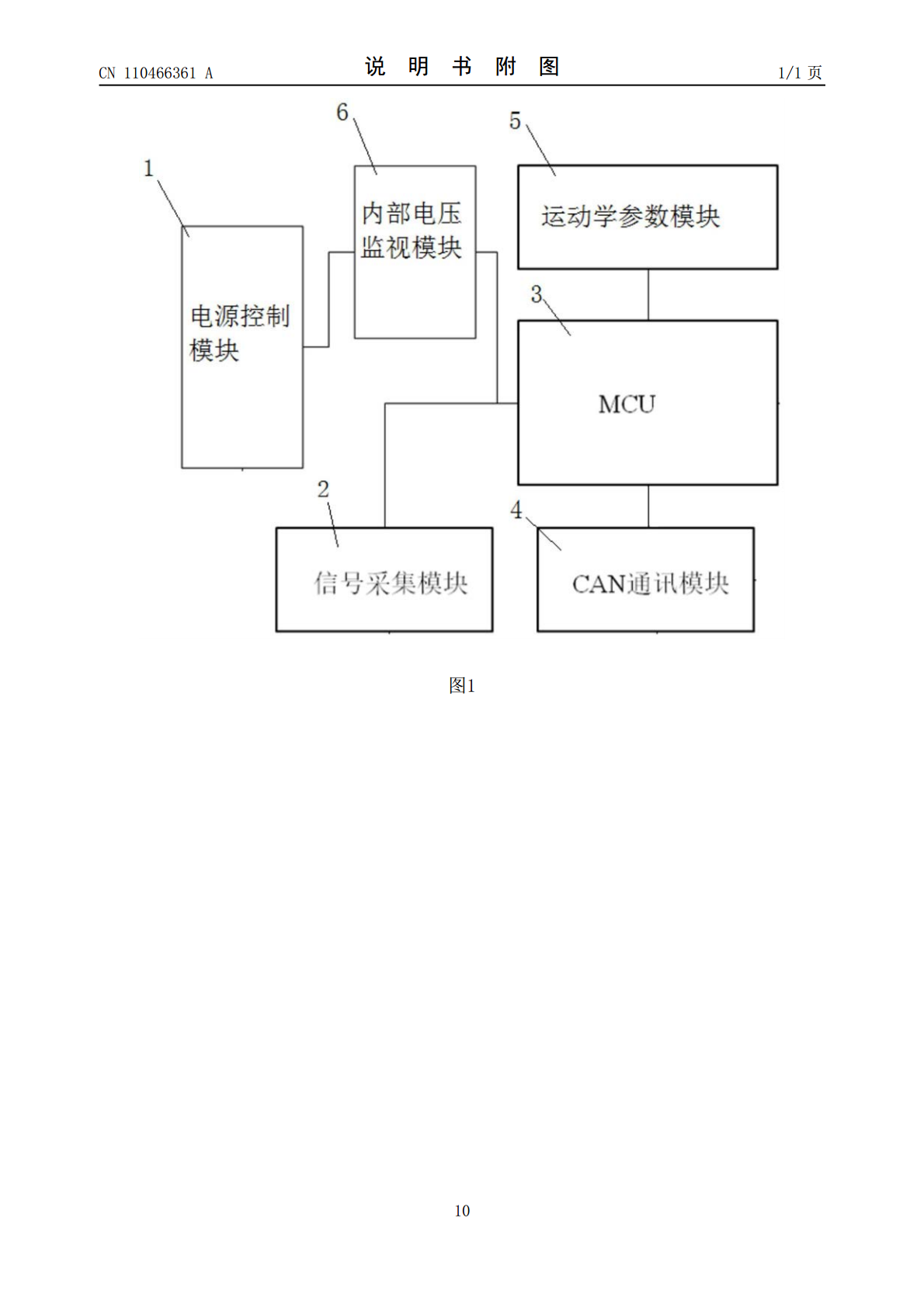
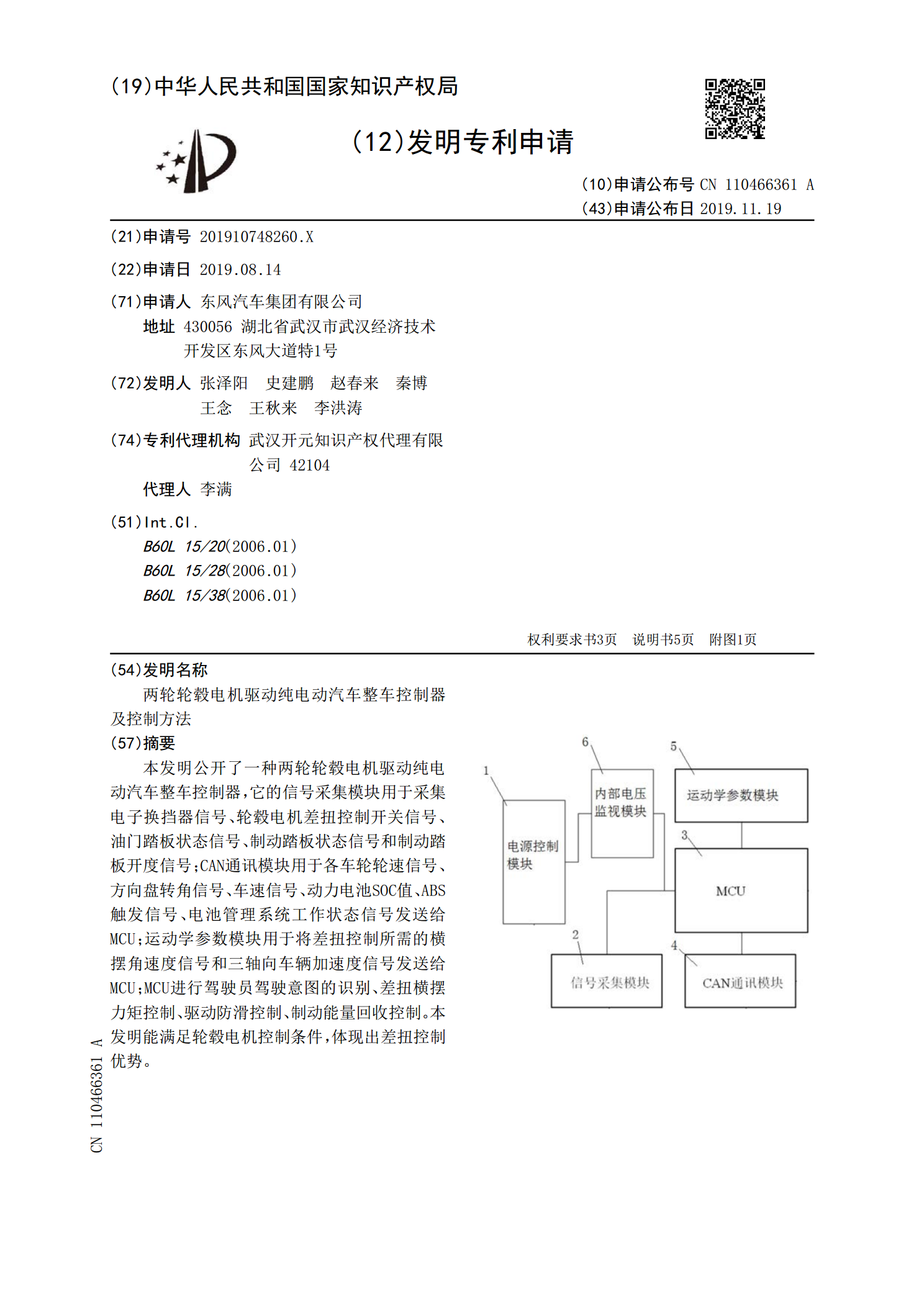
本发明公开了一种两轮轮毂电机驱动纯电动汽车整车控制器,它的信号采集模块用于采集电子换挡器信号、轮毂电机差扭控制开关信号、油门踏板状态信号、制动踏板状态信号和制动踏板开度信号;CAN通讯模块用于各车轮轮速信号、方向盘转角信号、车速信号、动力电池SOC值、ABS触发信号、电池管理系统工作状态信号发送给MCU;运动学参数模块用于将差扭控制所需的横摆角速度信号和三轴向车辆加速度信号发送给MCU;MCU进行驾驶员驾驶意图的识别、差扭横摆力矩控制、驱动防滑控制、制动能量回收控制。本发明能满足轮毂电机控制条件,体现出差
一种整车控制器独立模块化的轮毂电机驱动电动汽车及其控制方法.pdf
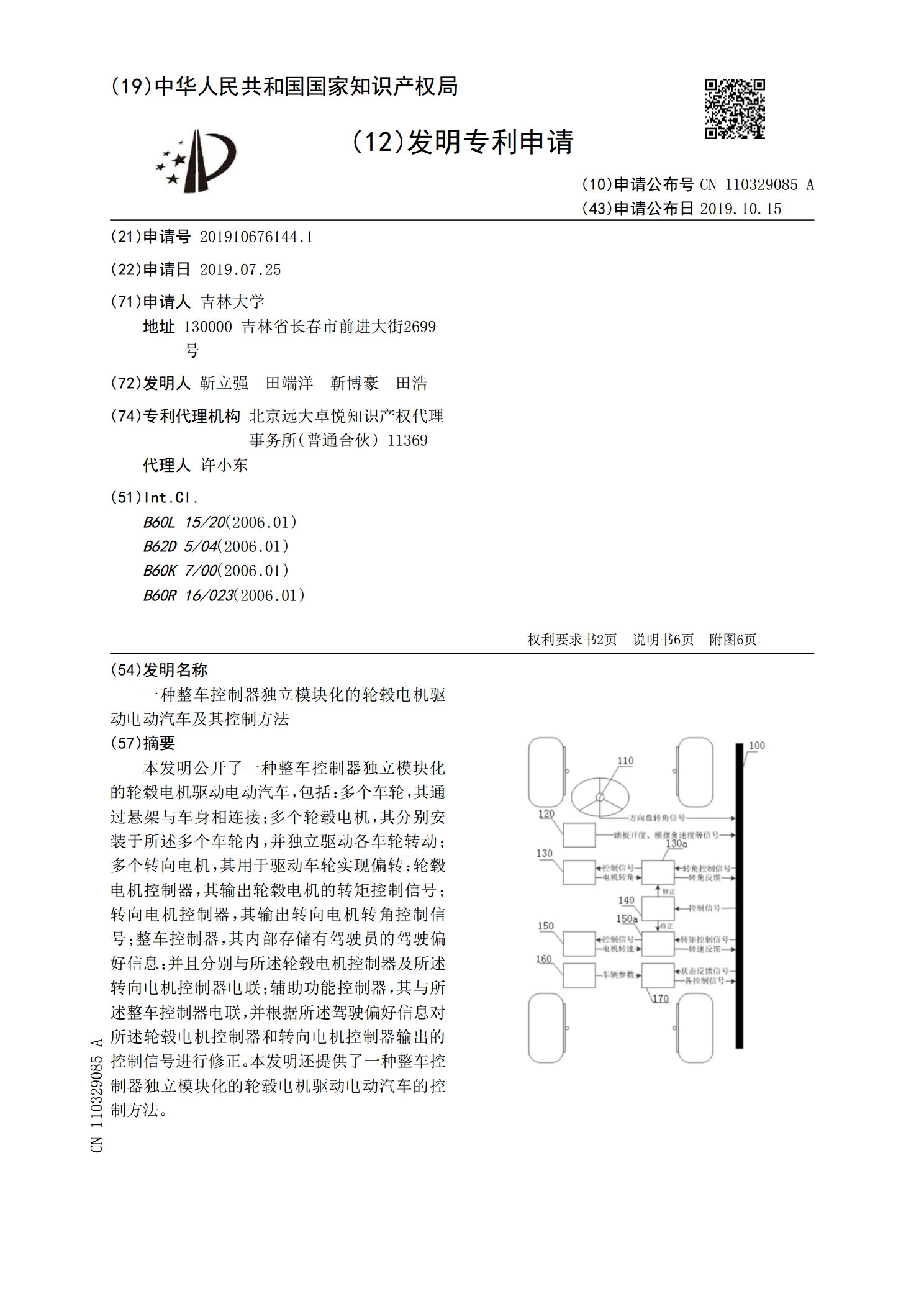
本发明公开了一种整车控制器独立模块化的轮毂电机驱动电动汽车,包括:多个车轮,其通过悬架与车身相连接;多个轮毂电机,其分别安装于所述多个车轮内,并独立驱动各车轮转动;多个转向电机,其用于驱动车轮实现偏转;轮毂电机控制器,其输出轮毂电机的转矩控制信号;转向电机控制器,其输出转向电机转角控制信号;整车控制器,其内部存储有驾驶员的驾驶偏好信息;并且分别与所述轮毂电机控制器及所述转向电机控制器电联;辅助功能控制器,其与所述整车控制器电联,并根据所述驾驶偏好信息对所述轮毂电机控制器和转向电机控制器输出的控制信号进行修

基于轮毂电机的纯电动汽车驱动防滑控制系统及方法.pdf
本发明提供一种基于轮毂电机的纯电动汽车驱动防滑控制方法,获取左前轮、右前轮、左后轮和右后轮的轮速,判断左前轮、右前轮的轮速差值是否小于或等于150r/min,是则取左前轮轮速w1作为前轮目标转速,否则取较小者为前轮目标转速;同理算出后轮目标转速M_Speed_R;二者比较得到整车的目标转速;分别将4个车轮的轮速与整车的目标转速对比,当判断该车轮有飞转的趋势,则降低发送给该车轮的轮毂电机控制器的力矩命令;当4个车轮的轮速均在合理范围内,则发送给各个轮毂电机控制器的力矩命令恢复为由驾驶员意图决定其大小的模式,
纯电动汽车整车控制器(TAC).docx
纯电动汽车整车控制器(TAC)项目介绍:纯电动汽车整车控制器对新能源汽车的动力性、安全性、经济性、操纵稳定性和舒适性等都有重要影响,它是新能源汽车上的一种关键装置。在车辆行驶过程中,整车控制器通过开关输入端口、模拟量转换模块、CAN总线等硬件线路采集路况信息、驾驶员意图、车辆状态、设备运行状态等参数,依托高速运行的CPU和控制端口来执行预设的控制算法和管理策略,再将指令和信息等通过CAN总线、开关输出端口等对动力系统的执行部件进行实时的、可靠的、科学的控制,以实现车辆的动力性、可靠性和经济性。其硬件结构框

纯电动汽车整车控制器(TAC).docx
纯电动汽车整车控制器(TAC)项目介绍:纯电动汽车整车控制器对新能源汽车的动力性、安全性、经济性、操纵稳定性和舒适性等都有重要影响,它是新能源汽车上的一种关键装置。在车辆行驶过程中,整车控制器通过开关输入端口、模拟量转换模块、CAN总线等硬件线路采集路况信息、驾驶员意图、车辆状态、设备运行状态等参数,依托高速运行的CPU和控制端口来执行预设的控制算法和管理策略,再将指令和信息等通过CAN总线、开关输出端口等对动力系统的执行部件进行实时的、可靠的、科学的控制,以实现车辆的动力性、可靠性和经济性。其硬件结构框