
截瘫助行外骨骼研究综述:从拟人设计依据到外骨骼研究现状.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

截瘫助行外骨骼研究综述:从拟人设计依据到外骨骼研究现状.pptx
,CONTENTS01.02.人体骨骼结构与功能外骨骼与人体骨骼的匹配人体运动生物力学基础人体测量数据与外骨骼设计03.国内外研究进展外骨骼技术实现方式外骨骼应用场景与效果外骨骼技术面临的挑战与解决方案04.外骨骼技术发展趋势外骨骼在医疗康复领域的应用前景外骨骼在其他领域的应用前景外骨骼技术的未来发展方向与挑战感谢您的观看!
截瘫患者助行外骨骼.pdf
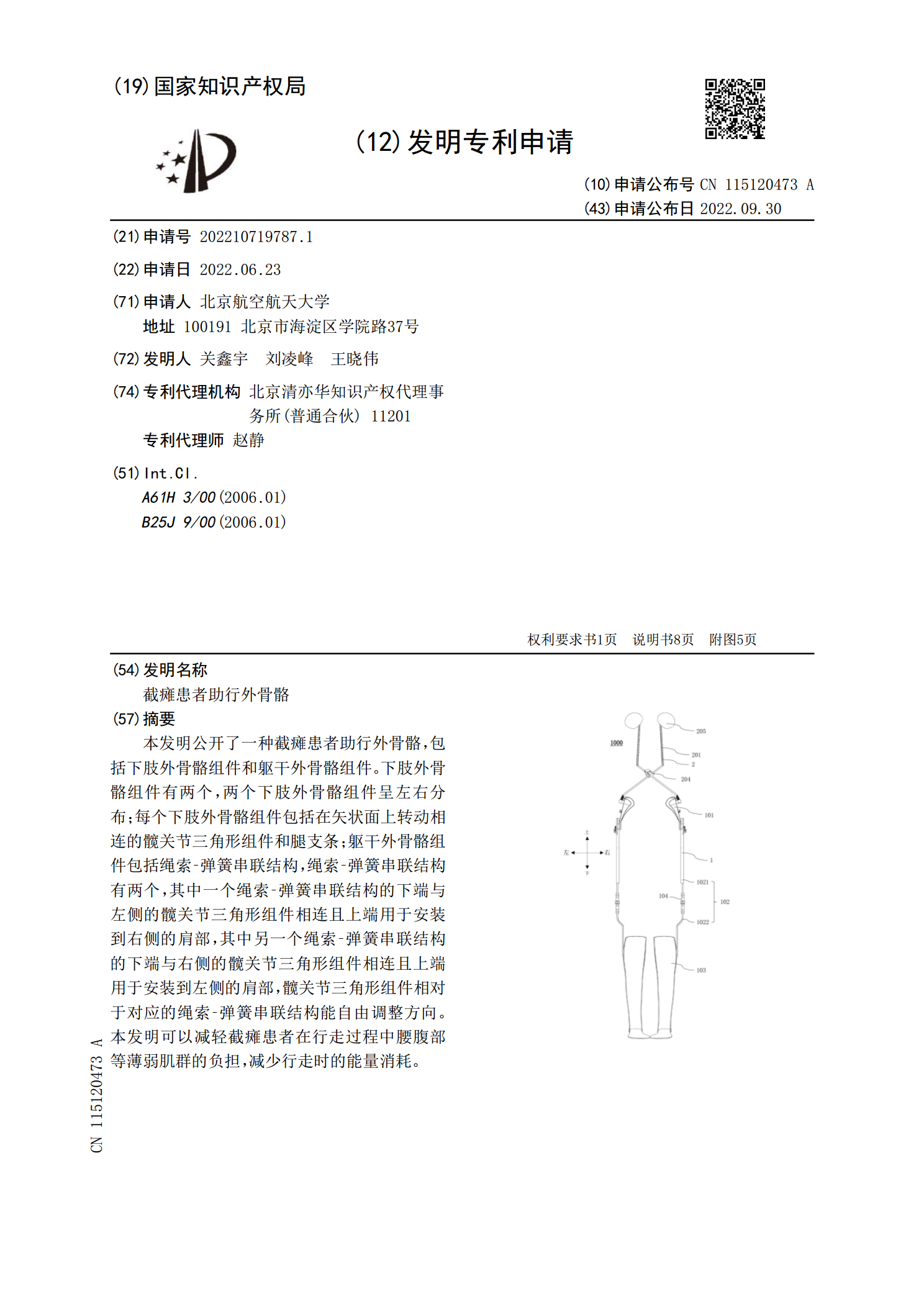
本发明公开了一种截瘫患者助行外骨骼,包括下肢外骨骼组件和躯干外骨骼组件。下肢外骨骼组件有两个,两个下肢外骨骼组件呈左右分布;每个下肢外骨骼组件包括在矢状面上转动相连的髋关节三角形组件和腿支条;躯干外骨骼组件包括绳索‑弹簧串联结构,绳索‑弹簧串联结构有两个,其中一个绳索‑弹簧串联结构的下端与左侧的髋关节三角形组件相连且上端用于安装到右侧的肩部,其中另一个绳索‑弹簧串联结构的下端与右侧的髋关节三角形组件相连且上端用于安装到左侧的肩部,髋关节三角形组件相对于对应的绳索‑弹簧串联结构能自由调整方向。本发明可以减轻

足底轮式驱动的截瘫助行外骨骼.pdf
一种足底轮式驱动的截瘫助行外骨骼,包括下肢支具、足底驱动模块和电源及控制电路,其中下肢支具用于支撑和固定使用者下肢;足底驱动模块包括由动力推动使得使用者前行的轮子;电源及控制电路包括电源模块、驱动装置和信号收发装置。通过本发明的足底轮式驱动的截瘫助行外骨骼,无需考虑肢体关节力线,且不采用复杂机电控制方案以协同各关节运动,只需控制足底电机就可以实现行走、可降低设备复杂性、令外骨骼在结构上更加轻便,使得截瘫助行外骨骼的成本更低。

基于人体感知信息的踝足助行外骨骼的设计与控制研究.docx
基于人体感知信息的踝足助行外骨骼的设计与控制研究标题:基于人体感知信息的踝足助行外骨骼的设计与控制研究摘要:随着人口老龄化和残疾人口的增加,研究和开发辅助设备以提高人类运动能力变得越来越重要。踝足助行外骨骼作为一种新型的辅助设备,在改善行走、提升平衡能力和减轻运动负荷方面具有巨大的潜力。本文将探讨基于人体感知信息的踝足助行外骨骼的设计与控制,包括传感技术、运动控制策略以及人机交互等方面的研究内容。第一节:引言1.1背景和意义1.2目前研究现状1.3本文的研究内容和结构安排第二节:人体感知信息的获取与处理2

助行训练机器人腿部外骨骼机构的建模与研究.docx
助行训练机器人腿部外骨骼机构的建模与研究标题:助行训练机器人腿部外骨骼机构的建模与研究摘要:随着人口老龄化的加剧和康复机器人技术的快速发展,助行训练机器人腿部外骨骼机构在康复领域中得到广泛应用。本文通过对助行训练机器人腿部外骨骼机构的建模与研究,旨在提高机器人助行的效果和安全性。首先,对腿部外骨骼机构的结构进行分析,并建立其动力学模型。然后,通过对机器人的运动学参数进行测量和分析,优化机器人的运动学设计。最后,使用仿真和实验证明了该外骨骼机构的有效性。1.引言助行训练机器人腿部外骨骼机构是一种能够增强人类