
基于人体感知信息的踝足助行外骨骼的设计与控制研究.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于人体感知信息的踝足助行外骨骼的设计与控制研究.docx
基于人体感知信息的踝足助行外骨骼的设计与控制研究标题:基于人体感知信息的踝足助行外骨骼的设计与控制研究摘要:随着人口老龄化和残疾人口的增加,研究和开发辅助设备以提高人类运动能力变得越来越重要。踝足助行外骨骼作为一种新型的辅助设备,在改善行走、提升平衡能力和减轻运动负荷方面具有巨大的潜力。本文将探讨基于人体感知信息的踝足助行外骨骼的设计与控制,包括传感技术、运动控制策略以及人机交互等方面的研究内容。第一节:引言1.1背景和意义1.2目前研究现状1.3本文的研究内容和结构安排第二节:人体感知信息的获取与处理2

基于人体感知信息的踝足助行外骨骼的设计与控制研究的开题报告.docx
基于人体感知信息的踝足助行外骨骼的设计与控制研究的开题报告一、选题背景及意义随着人口老龄化的加速,行动障碍人群越来越多,其中足踝部的疾病和受伤是导致助行困难的主要原因之一。踝足助行外骨骼作为一种新型的康复辅助设备,能够帮助有行动障碍的人更好地行走,提高他们的生活质量。而基于人体感知信息的踝足助行外骨骼,能够更好地适应行走时的各种复杂环境,实现更加自然、舒适和安全的步态。二、研究内容及目标本研究旨在设计和制造一种基于人体感知信息的踝足助行外骨骼,并开发相应的控制算法,以实现对助行外骨骼运动轨迹的精确控制,稳

基于人体感知信息的踝足助行外骨骼的设计与控制研究的任务书.docx
基于人体感知信息的踝足助行外骨骼的设计与控制研究的任务书任务书一、课题背景随着我国人口老龄化加剧,踝足功能障碍的患病率也随之增高。这给老年人的生活和活动带来了很大不便,也增加了医疗系统的压力。为了解决这个问题,越来越多的研究者开始关注外骨骼技术在踝足助行中的应用。而基于人体感知信息的外骨骼,作为外骨骼技术的重要进展,已经广泛应用于医疗、康复和运动等领域,并取得了很大的发展和进步。本课题旨在针对目前的踝足助行外骨骼存在的问题,通过对人体感知信息的感知和处理,降低对用户的干扰,提高外骨骼的安全性和控制精度,为
一种踝足助行器的智能控制方法.pdf
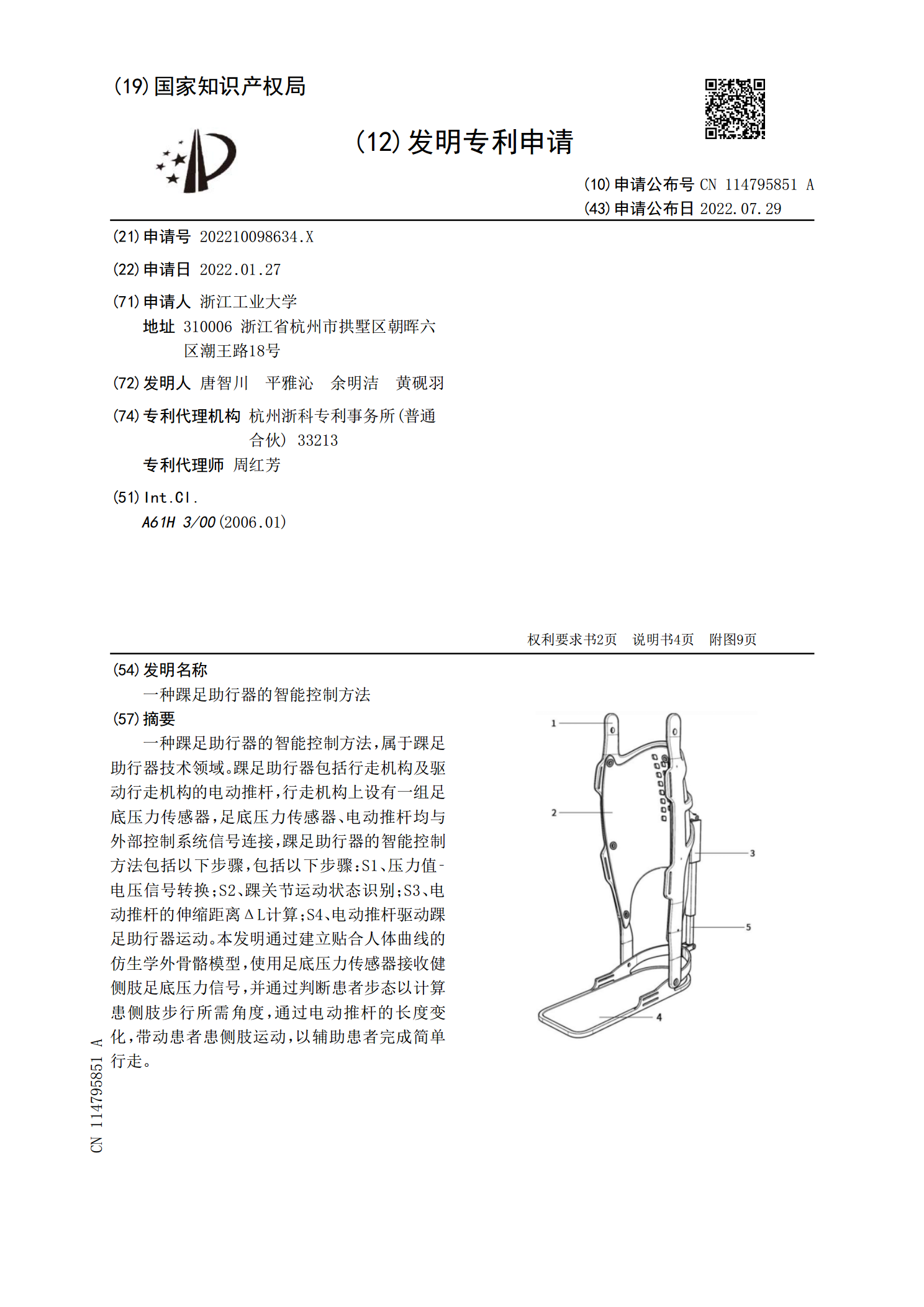
一种踝足助行器的智能控制方法,属于踝足助行器技术领域。踝足助行器包括行走机构及驱动行走机构的电动推杆,行走机构上设有一组足底压力传感器,足底压力传感器、电动推杆均与外部控制系统信号连接,踝足助行器的智能控制方法包括以下步骤,包括以下步骤:S1、压力值‑电压信号转换;S2、踝关节运动状态识别;S3、电动推杆的伸缩距离ΔL计算;S4、电动推杆驱动踝足助行器运动。本发明通过建立贴合人体曲线的仿生学外骨骼模型,使用足底压力传感器接收健侧肢足底压力信号,并通过判断患者步态以计算患侧肢步行所需角度,通过电动推杆的长度

基于足压信息的下肢助行器气动关节控制机理研究的任务书.docx
基于足压信息的下肢助行器气动关节控制机理研究的任务书一、研究背景及意义随着人口老龄化的不断加剧,下肢机能障碍和疾病的患病率也随之增加。这些疾病包括脑卒中、脊髓损伤、神经性疾病等,给患者的生活造成极大的困扰。为了改善下肢机能障碍患者的生活质量,许多助行器的研发工作被开展。然而,助行器的研制面临着一系列的挑战,如如何准确地控制助行器的关节,如何更好地适应不同的使用场景等。因此,基于足压信息的下肢助行器气动关节控制机理研究具有重要的研究意义和现实意义。二、研究目标本研究的主要目标是研究基于足压信息的下肢助行器气