
改进混沌麻雀搜索算法及其在冗余机械臂逆运动学求解中的应用.pptx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
改进混沌麻雀搜索算法及其在冗余机械臂逆运动学求解中的应用.pptx
,目录PartOne麻雀搜索算法简介混沌理论在搜索算法中的应用混沌麻雀搜索算法的原理和流程PartTwo算法改进的必要性改进措施和方法改进后算法的流程和特点PartThree机械臂逆运动学求解的背景和意义冗余机械臂的特点和问题描述现有求解方法的分析和比较PartFour应用过程和实现细节实验设计和结果分析与其他方法的比较和优势分析PartFive本文工作总结未来研究方向和潜在应用THANKS

基于改进粒子群优化算法的冗余机械臂逆运动学求解.docx
基于改进粒子群优化算法的冗余机械臂逆运动学求解基于改进粒子群优化算法的冗余机械臂逆运动学求解摘要:冗余机械臂逆运动学求解一直是机器人研究的热点问题之一。本文针对该问题,提出了一种基于改进粒子群优化算法的冗余机械臂逆运动学求解方法。首先,对冗余机械臂的逆运动学问题进行描述,给出了求解的目标和约束条件。然后,介绍了粒子群优化算法的基本原理,针对算法存在的问题,提出了针对性的改进方法。最后,通过实验验证了算法的性能。关键词:冗余机械臂;逆运动学;粒子群优化算法;改进方法1.引言冗余机械臂是指自由度超过任务自由度
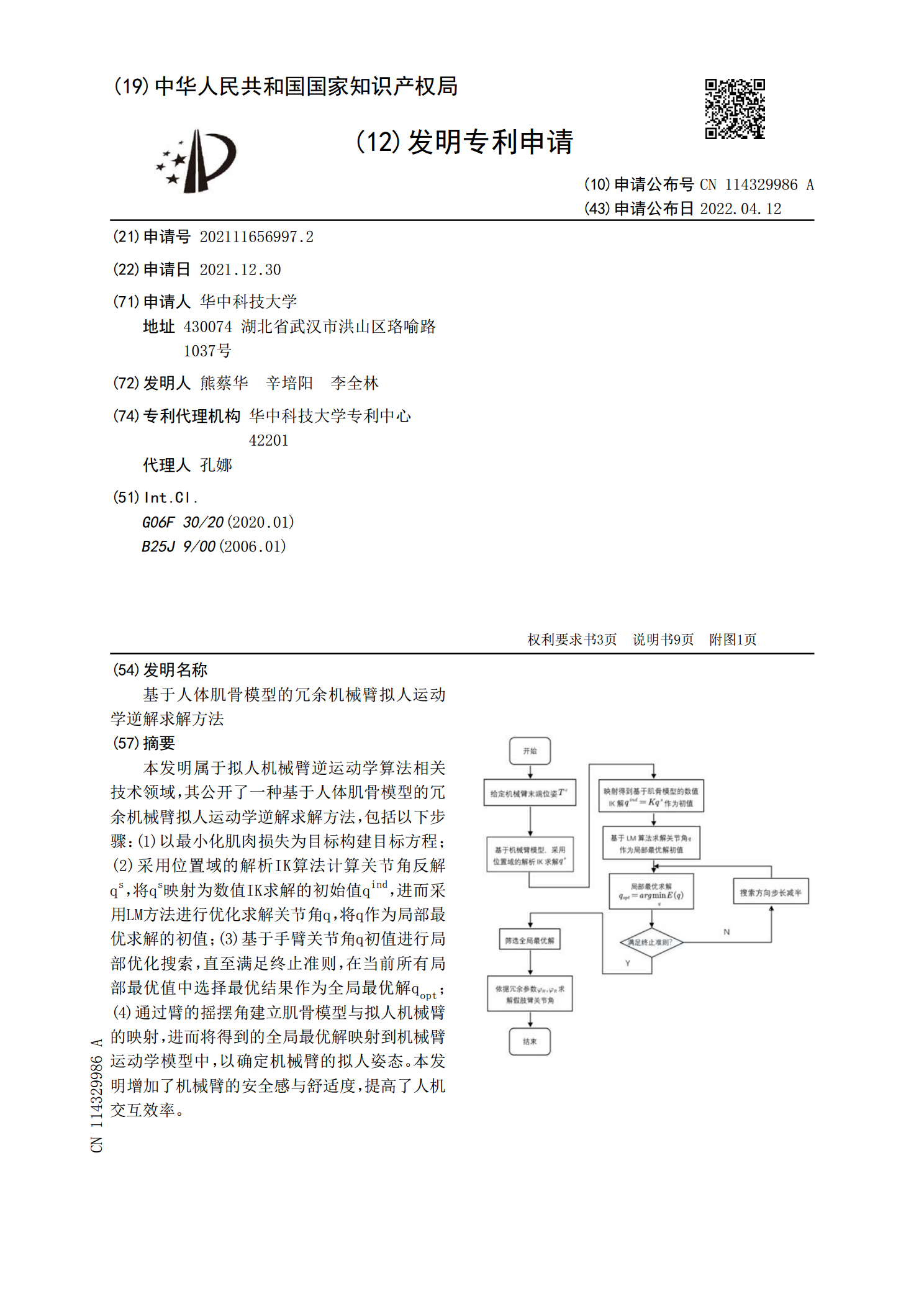
基于人体肌骨模型的冗余机械臂拟人运动学逆解求解方法.pdf
本发明属于拟人机械臂逆运动学算法相关技术领域,其公开了一种基于人体肌骨模型的冗余机械臂拟人运动学逆解求解方法,包括以下步骤:(1)以最小化肌肉损失为目标构建目标方程;(2)采用位置域的解析IK算法计算关节角反解q<base:Sup>s</base:Sup>,将q<base:Sup>s</base:Sup>映射为数值IK求解的初始值q<base:Sup>ind</base:Sup>,进而采用LM方法进行优化求解关节角q,将q作为局部最优求解的初值;(3)基于手臂关节角q初值进行局部优化搜索,直至满足终止准则
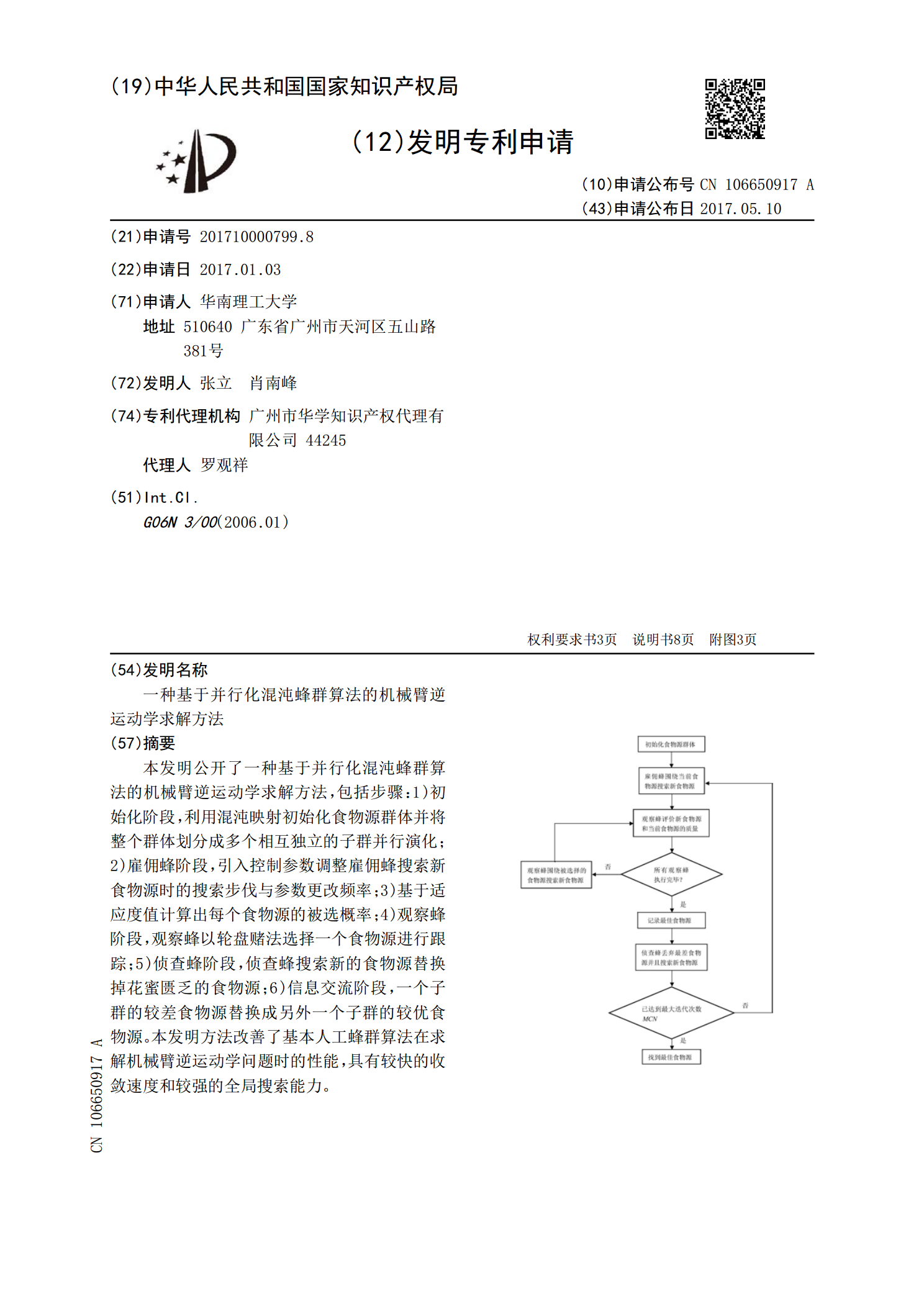
一种基于并行化混沌蜂群算法的机械臂逆运动学求解方法.pdf
本发明公开了一种基于并行化混沌蜂群算法的机械臂逆运动学求解方法,包括步骤:1)初始化阶段,利用混沌映射初始化食物源群体并将整个群体划分成多个相互独立的子群并行演化;2)雇佣蜂阶段,引入控制参数调整雇佣蜂搜索新食物源时的搜索步伐与参数更改频率;3)基于适应度值计算出每个食物源的被选概率;4)观察蜂阶段,观察蜂以轮盘赌法选择一个食物源进行跟踪;5)侦查蜂阶段,侦查蜂搜索新的食物源替换掉花蜜匮乏的食物源;6)信息交流阶段,一个子群的较差食物源替换成另外一个子群的较优食物源。本发明方法改善了基本人工蜂群算法在求解

存在关节限位的冗余机械臂逆运动学研究.docx
存在关节限位的冗余机械臂逆运动学研究摘要本文主要研究了存在关节限位的冗余机械臂的逆运动学问题。对于冗余机械臂的逆运动学问题,传统的方法通常采用雅可比矩阵,但是这种方法对于存在关节限位的情况不适用。本文针对这种情况,提出了一种基于优化方法的逆运动学求解方法。首先建立了机械臂的运动学模型,然后将机械臂的末端位姿作为目标变量,通过优化目标函数的方法,求解出关节角度。最后通过仿真实验,验证了本文方法的有效性。关键词:冗余机械臂,逆运动学,关节限位,优化方法,仿真实验引言在机器人控制领域,机械臂逆运动学是一个重要的