
基于人体肌骨模型的冗余机械臂拟人运动学逆解求解方法.pdf

努力****南绿


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于人体肌骨模型的冗余机械臂拟人运动学逆解求解方法.pdf
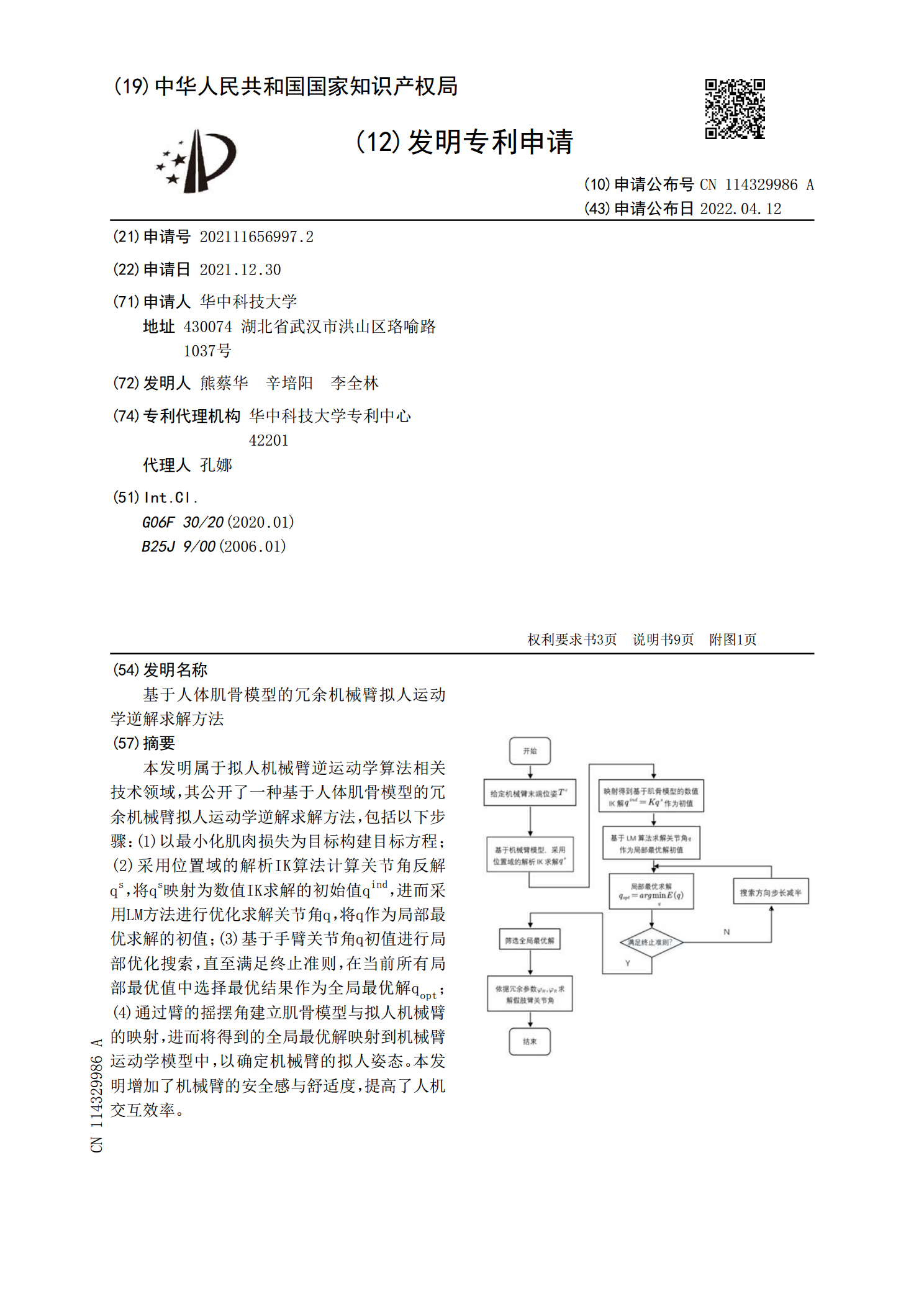
本发明属于拟人机械臂逆运动学算法相关技术领域,其公开了一种基于人体肌骨模型的冗余机械臂拟人运动学逆解求解方法,包括以下步骤:(1)以最小化肌肉损失为目标构建目标方程;(2)采用位置域的解析IK算法计算关节角反解q<base:Sup>s</base:Sup>,将q<base:Sup>s</base:Sup>映射为数值IK求解的初始值q<base:Sup>ind</base:Sup>,进而采用LM方法进行优化求解关节角q,将q作为局部最优求解的初值;(3)基于手臂关节角q初值进行局部优化搜索,直至满足终止准则

基于改进粒子群优化算法的冗余机械臂逆运动学求解.docx
基于改进粒子群优化算法的冗余机械臂逆运动学求解基于改进粒子群优化算法的冗余机械臂逆运动学求解摘要:冗余机械臂逆运动学求解一直是机器人研究的热点问题之一。本文针对该问题,提出了一种基于改进粒子群优化算法的冗余机械臂逆运动学求解方法。首先,对冗余机械臂的逆运动学问题进行描述,给出了求解的目标和约束条件。然后,介绍了粒子群优化算法的基本原理,针对算法存在的问题,提出了针对性的改进方法。最后,通过实验验证了算法的性能。关键词:冗余机械臂;逆运动学;粒子群优化算法;改进方法1.引言冗余机械臂是指自由度超过任务自由度

基于粒子群优化算法的冗余机械臂运动学逆解.docx
基于粒子群优化算法的冗余机械臂运动学逆解基于粒子群优化算法的冗余机械臂运动学逆解摘要:随着机器人技术的快速发展,冗余机械臂的研究日益受到关注。冗余机械臂具有多自由度和大的自由度操作空间,但其运动学逆解问题较复杂。传统的解决方法往往受限于计算复杂度和收敛速度等问题。为了解决这些问题,本文提出了一种基于粒子群优化算法的冗余机械臂运动学逆解方法。通过对冗余机械臂运动学逆解问题进行优化,可有效提高解的求解效率和精度。实验结果表明,所提方法能够快速求解冗余机械臂的运动学逆解,并能够满足实际应用需求。关键词:冗余机械
基于神经网络和构型编码的机械臂逆运动学求解方法.pdf
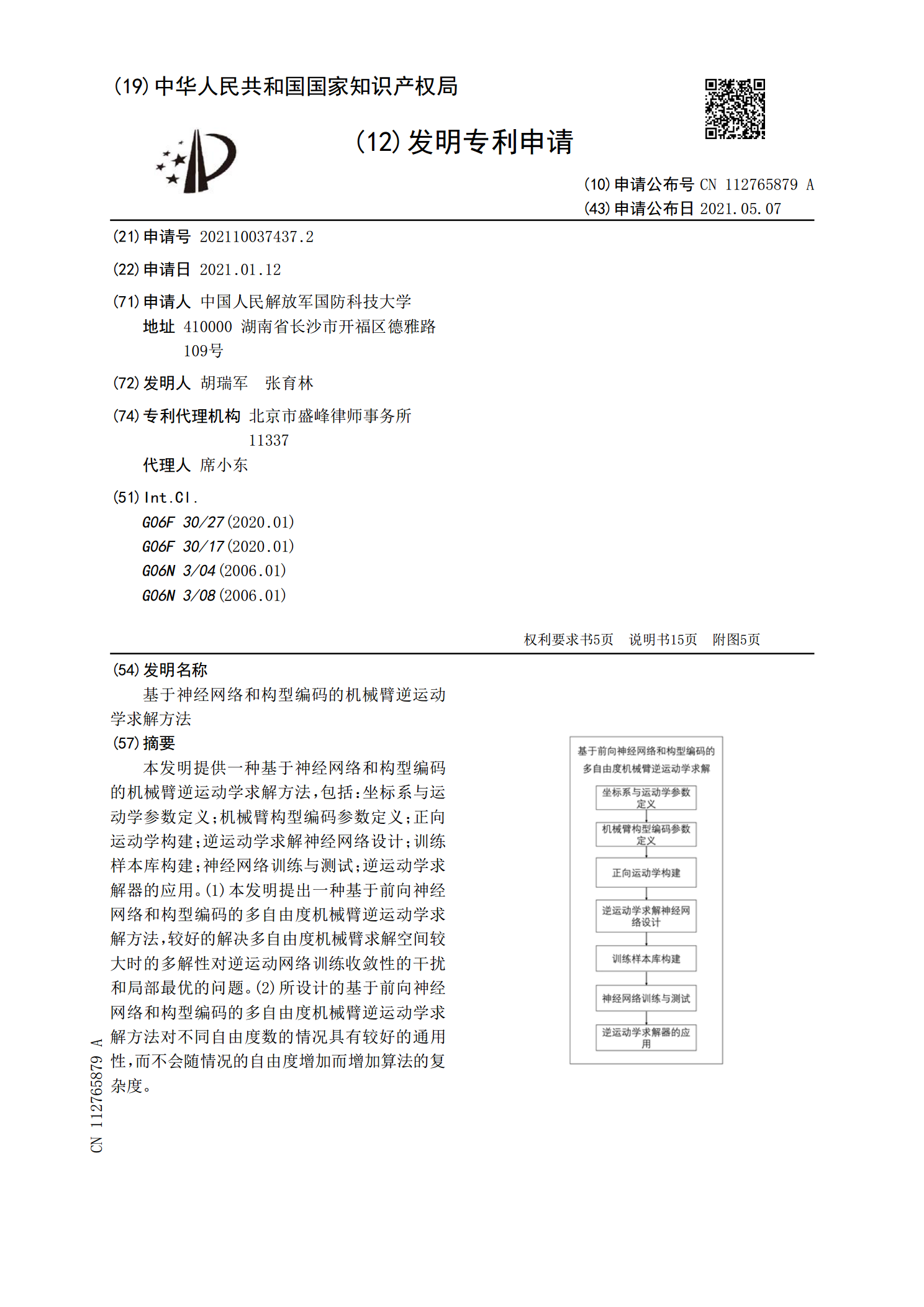
本发明提供一种基于神经网络和构型编码的机械臂逆运动学求解方法,包括:坐标系与运动学参数定义;机械臂构型编码参数定义;正向运动学构建;逆运动学求解神经网络设计;训练样本库构建;神经网络训练与测试;逆运动学求解器的应用。(1)本发明提出一种基于前向神经网络和构型编码的多自由度机械臂逆运动学求解方法,较好的解决多自由度机械臂求解空间较大时的多解性对逆运动网络训练收敛性的干扰和局部最优的问题。(2)所设计的基于前向神经网络和构型编码的多自由度机械臂逆运动学求解方法对不同自由度数的情况具有较好的通用性,而不会随情况

基于BP神经网络的救援机械臂的逆运动学求解.docx
基于BP神经网络的救援机械臂的逆运动学求解基于BP神经网络的救援机械臂逆运动学求解摘要:救援机械臂是一种重要的救援设备,它在各种复杂环境下执行任务,为人们提供生命安全保障。逆运动学是救援机械臂运动控制中的关键问题之一,其主要任务是根据目标位置确定各关节的角度,从而实现所需的动作。为了解决逆运动学求解问题,本文提出了一种基于BP神经网络的方法,并对其进行了模拟实验与性能分析。实验结果表明,基于BP神经网络的逆运动学求解方法具有较高的精确度和鲁棒性,能够有效应对各种复杂情况下的求解需求。1.引言救援机械臂是应