
一种基于并行化混沌蜂群算法的机械臂逆运动学求解方法.pdf

代瑶****zy

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于并行化混沌蜂群算法的机械臂逆运动学求解方法.pdf
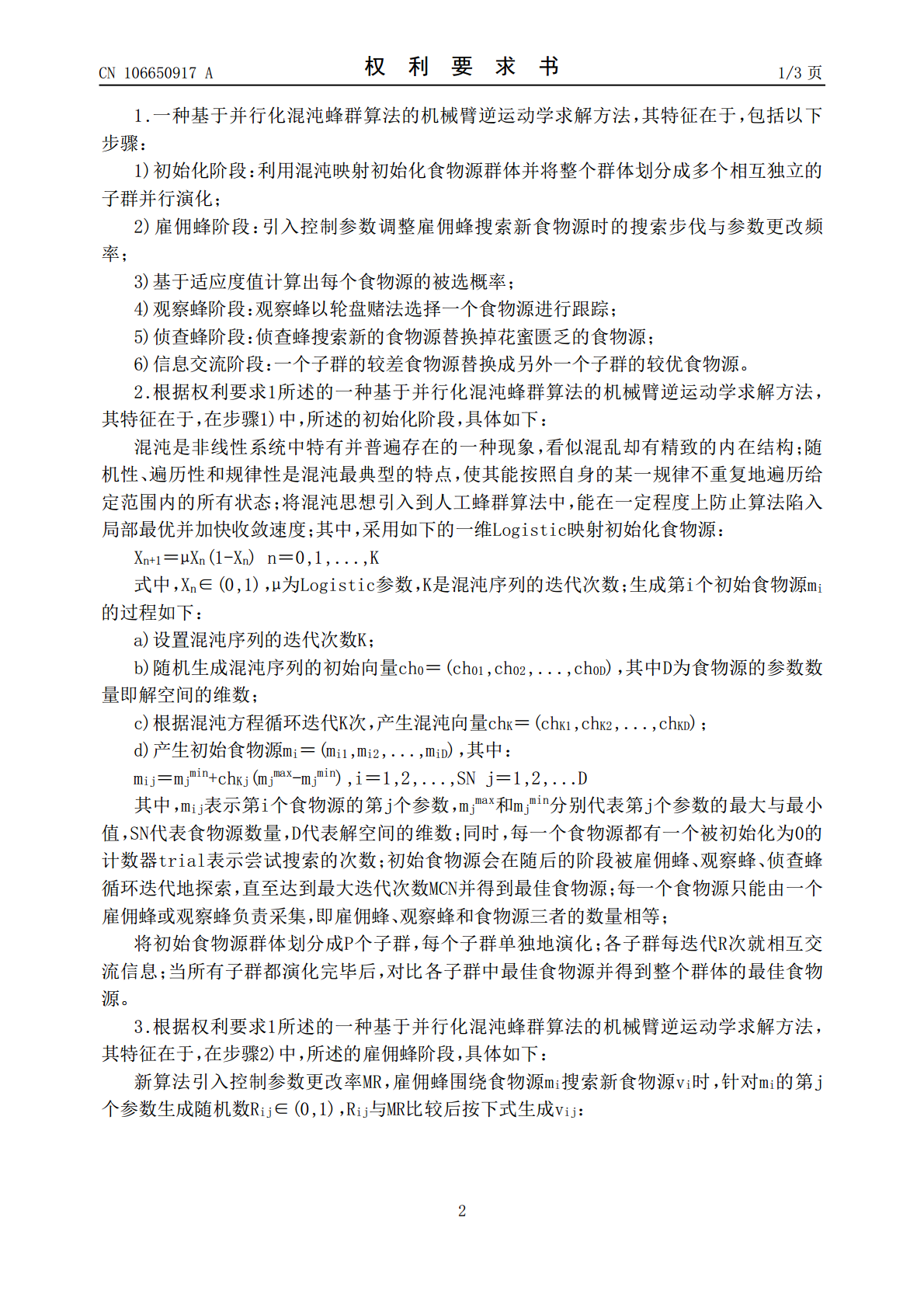
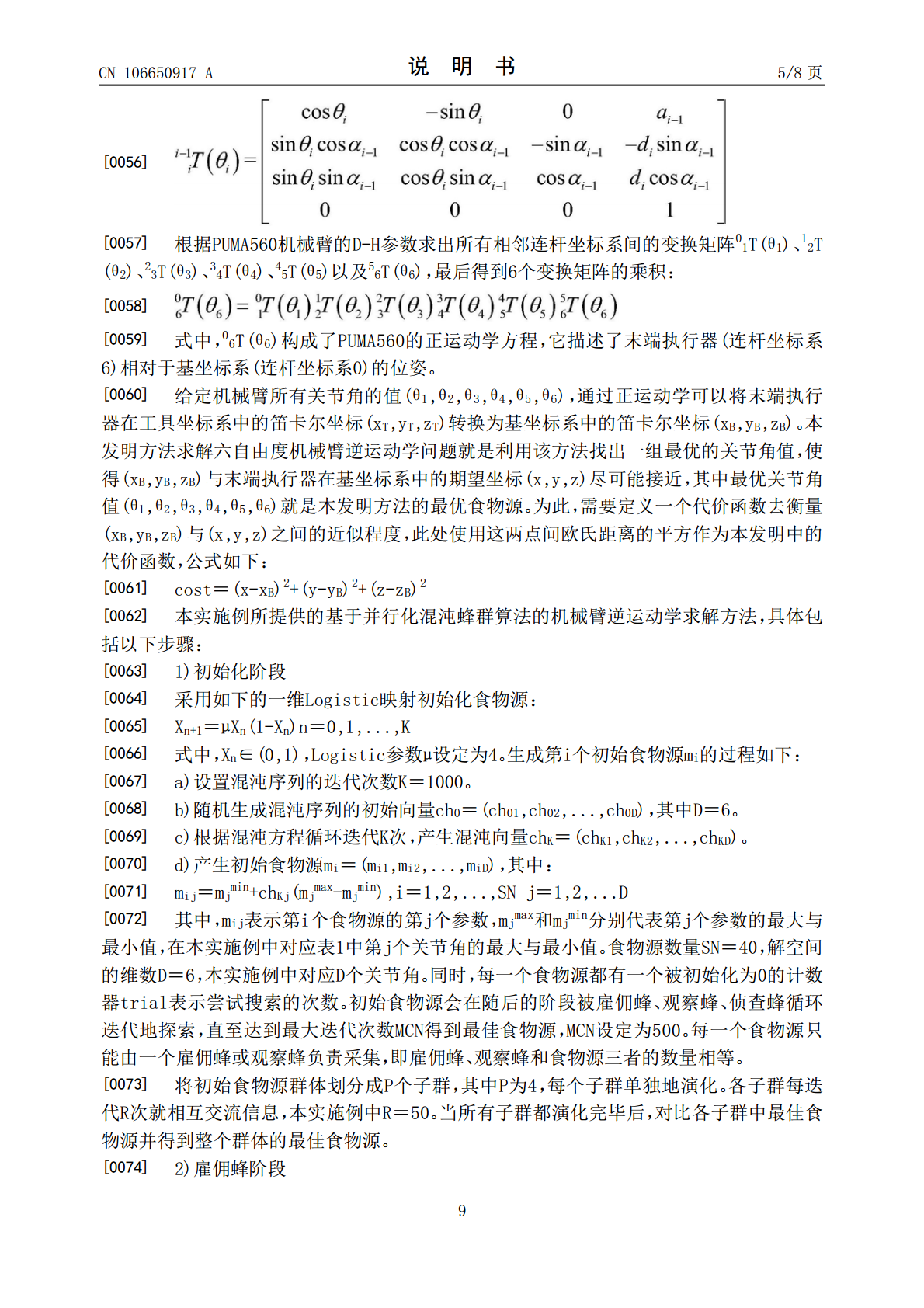
本发明公开了一种基于并行化混沌蜂群算法的机械臂逆运动学求解方法,包括步骤:1)初始化阶段,利用混沌映射初始化食物源群体并将整个群体划分成多个相互独立的子群并行演化;2)雇佣蜂阶段,引入控制参数调整雇佣蜂搜索新食物源时的搜索步伐与参数更改频率;3)基于适应度值计算出每个食物源的被选概率;4)观察蜂阶段,观察蜂以轮盘赌法选择一个食物源进行跟踪;5)侦查蜂阶段,侦查蜂搜索新的食物源替换掉花蜜匮乏的食物源;6)信息交流阶段,一个子群的较差食物源替换成另外一个子群的较优食物源。本发明方法改善了基本人工蜂群算法在求解
基于神经网络和构型编码的机械臂逆运动学求解方法.pdf
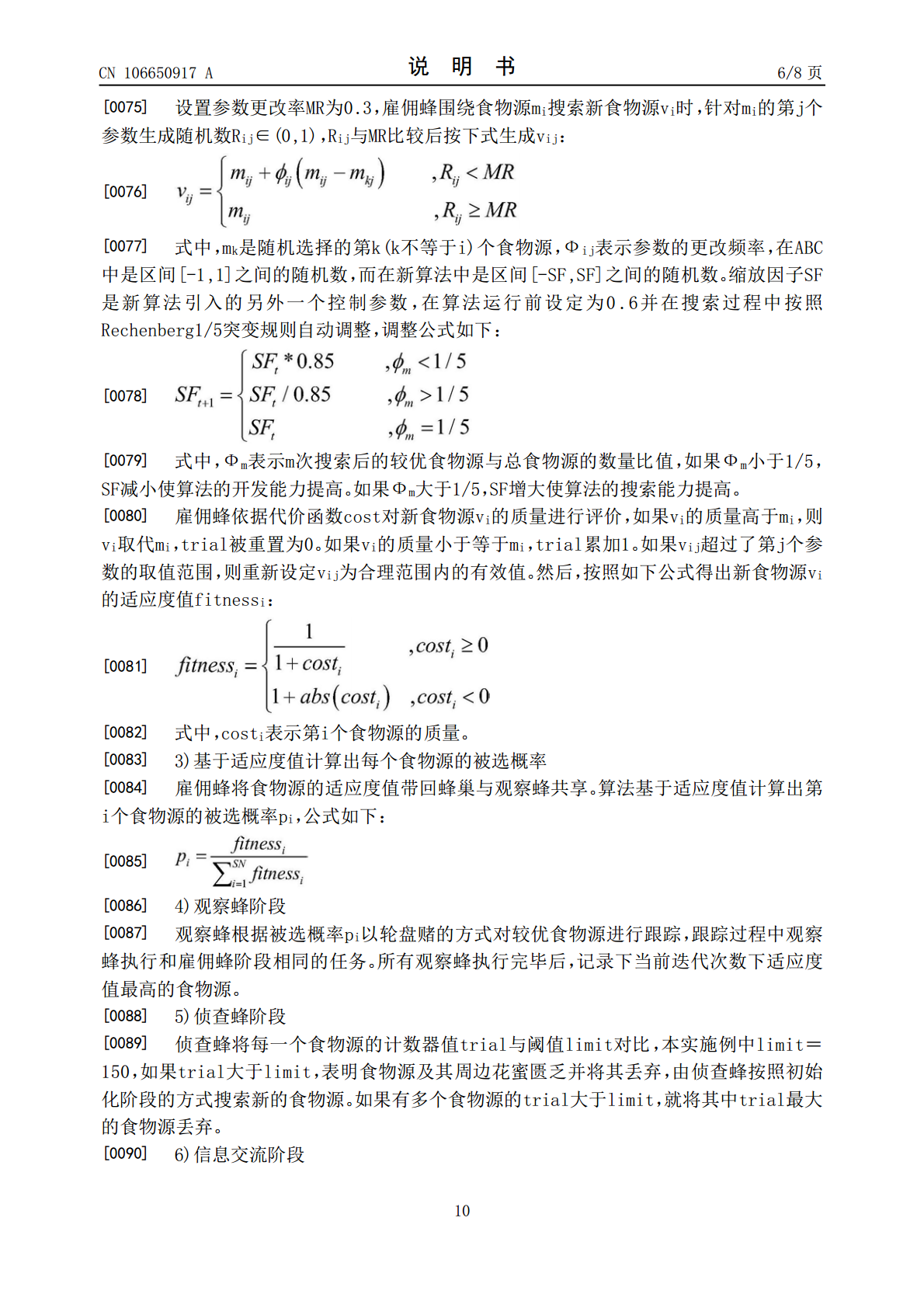
本发明提供一种基于神经网络和构型编码的机械臂逆运动学求解方法,包括:坐标系与运动学参数定义;机械臂构型编码参数定义;正向运动学构建;逆运动学求解神经网络设计;训练样本库构建;神经网络训练与测试;逆运动学求解器的应用。(1)本发明提出一种基于前向神经网络和构型编码的多自由度机械臂逆运动学求解方法,较好的解决多自由度机械臂求解空间较大时的多解性对逆运动网络训练收敛性的干扰和局部最优的问题。(2)所设计的基于前向神经网络和构型编码的多自由度机械臂逆运动学求解方法对不同自由度数的情况具有较好的通用性,而不会随情况
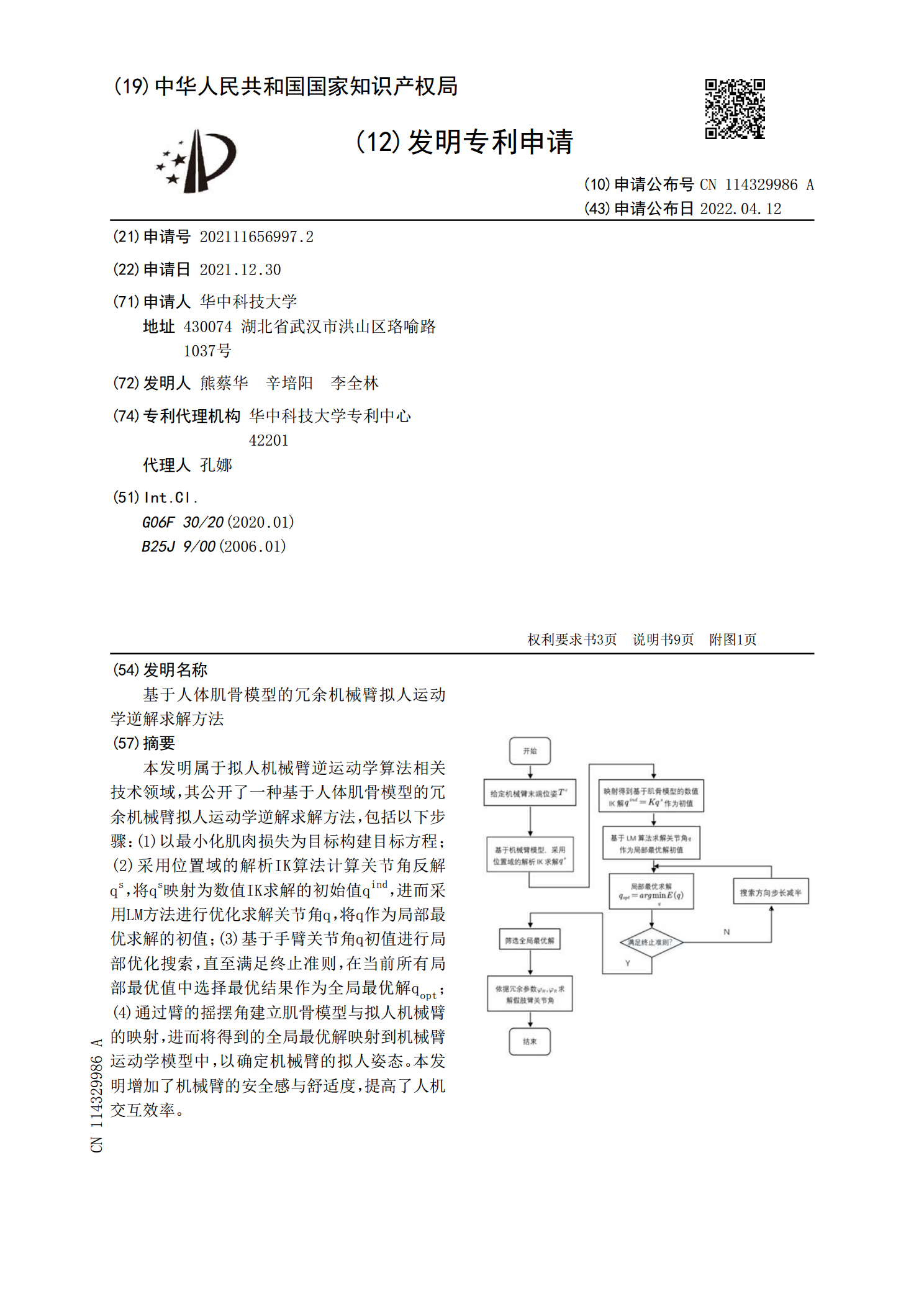
基于人体肌骨模型的冗余机械臂拟人运动学逆解求解方法.pdf
本发明属于拟人机械臂逆运动学算法相关技术领域,其公开了一种基于人体肌骨模型的冗余机械臂拟人运动学逆解求解方法,包括以下步骤:(1)以最小化肌肉损失为目标构建目标方程;(2)采用位置域的解析IK算法计算关节角反解q<base:Sup>s</base:Sup>,将q<base:Sup>s</base:Sup>映射为数值IK求解的初始值q<base:Sup>ind</base:Sup>,进而采用LM方法进行优化求解关节角q,将q作为局部最优求解的初值;(3)基于手臂关节角q初值进行局部优化搜索,直至满足终止准则
基于人工蜂群搜索的七自由度机械臂逆向运动学求解方法.pdf
本发明公开了一种基于人工蜂群搜索的七自由度机械臂逆向运动学求解方法,该方法用于求取七自由度关节串联型机械臂运动路径中位姿插补点的逆向运动学方程的数值解,该方法基于七自由度机械臂正向运动学方程建立目标函数,采用人工蜂群算法三段式搜索策略,对运动路径中的位姿插补点的各个关节绝对角度值在从起点到终点的角度变化范围内进行最优值搜索,并将搜索结果作为该位姿插补点逆向运动学方程的数值解。通过本发明述及的三段式搜索策略可增强人工蜂群算法的搜索能力、提高算法的收敛速度和计算精度,从而简化七自由度机械臂逆向运动学求解的复杂
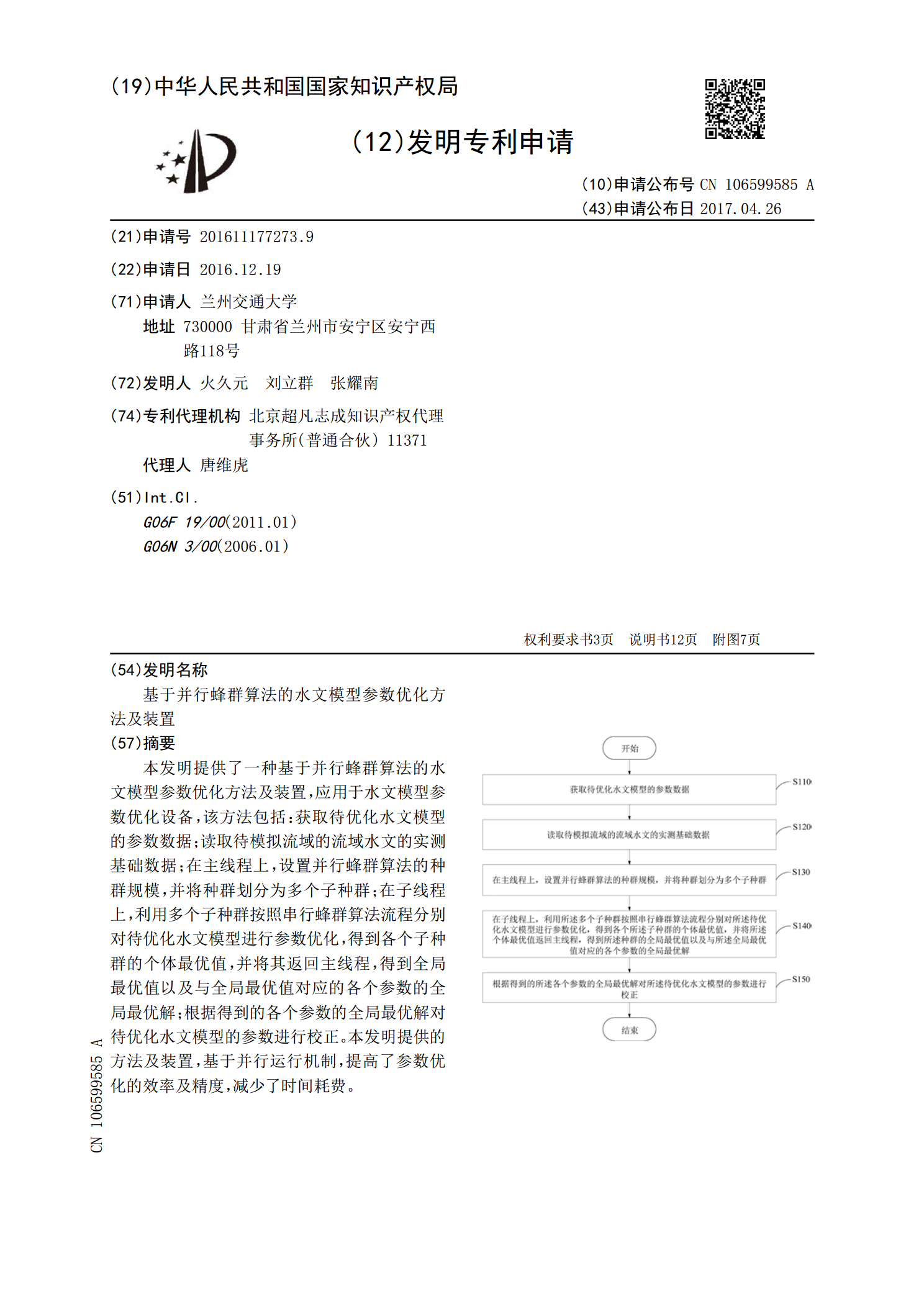
基于并行蜂群算法的水文模型参数优化方法及装置.pdf
本发明提供了一种基于并行蜂群算法的水文模型参数优化方法及装置,应用于水文模型参数优化设备,该方法包括:获取待优化水文模型的参数数据;读取待模拟流域的流域水文的实测基础数据;在主线程上,设置并行蜂群算法的种群规模,并将种群划分为多个子种群;在子线程上,利用多个子种群按照串行蜂群算法流程分别对待优化水文模型进行参数优化,得到各个子种群的个体最优值,并将其返回主线程,得到全局最优值以及与全局最优值对应的各个参数的全局最优解;根据得到的各个参数的全局最优解对待优化水文模型的参数进行校正。本发明提供的方法及装置,基