
空间约束下多关节机械臂架末端柔顺控制方法.docx

92****sc


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

空间约束下多关节机械臂架末端柔顺控制方法.docx
空间约束下多关节机械臂架末端柔顺控制方法1.内容综述随着空间探索和技术的发展,多关节机械臂在空间任务中扮演着越来越重要的角色。由于空间环境的复杂性和不确定性,传统的刚性控制方法难以满足高精度和高稳定性的要求。研究空间约束下多关节机械臂架末端柔顺控制方法具有重要的理论意义和实际应用价值。柔性控制理论得到了广泛关注和发展,成为解决柔性机械系统控制问题的有效手段。柔顺控制方法通过引入柔性模型,将系统的不确定性纳入控制策略中,从而有效地减小误差和提高系统性能。在空间约束环境下,机械臂的柔顺控制仍面临诸多挑战。空间

末端关节臂、机械臂以及医疗台车.pdf
本发明涉及一种末端关节臂、机械臂以及医疗台车,末端关节臂包括第一关节臂区段和多个安装结构,第一关节臂区段具有第一中心轴线,多个安装结构,多个安装结构至少设置在第一关节臂区段上,第一关节臂区段上设置的多个安装结构围绕第一中心轴线周向分布,安装结构被配置为用于可拆卸安装操作器械,使多个安装结构上的多个操作器械沿着第一中心轴线的轴向保持相互平行,且沿着第一中心轴线的径向相互汇集。上述技术方案中,安装结构可以根据需要任意安装或拆卸操作器械,满足实际的手术需求,未安装有操作器械的安装结构可以作为预留的安装位置,节省

多柔性关节轻型机械臂轴孔柔顺装配技术研究.docx
多柔性关节轻型机械臂轴孔柔顺装配技术研究多柔性关节轻型机械臂轴孔柔顺装配技术研究摘要:多柔性关节轻型机械臂具有重量轻、柔性高等特点,在工业生产中具有广泛的应用前景。而机械臂的关键部件之一——轴孔柔顺装配技术的研究对于提高机械臂的稳定性和精度具有重要意义。本文通过对多柔性关节轻型机械臂的结构和装配要求进行分析,从而探究轴孔柔顺装配技术的研究内容和关键问题,并提出了相应的解决方案和优化策略。实验结果表明,采用此技术可以显著提高机械臂的柔性和精度,为实际应用提供了有力的支持。关键词:多柔性关节轻型机械臂;轴孔柔

空间连续体机械臂运动学分析与末端控制方法.docx
空间连续体机械臂运动学分析与末端控制方法第一章绪论随着科技的不断发展,空间连续体机械臂在航空航天、机器人制造、工业自动化等领域的应用越来越广泛。空间连续体机械臂作为一种具有高度灵活性和精确性的操作工具,已经成为现代制造业中不可或缺的重要组成部分。由于空间连续体机械臂的结构复杂、运动轨迹多变,对其进行运动学分析和末端控制具有很大的挑战性。研究空间连续体机械臂的运动学分析方法和末端控制策略,对于提高其性能和应用范围具有重要的理论和实际意义。本章主要围绕空间连续体机械臂的运动学分析与末端控制方法展开讨论。通过对
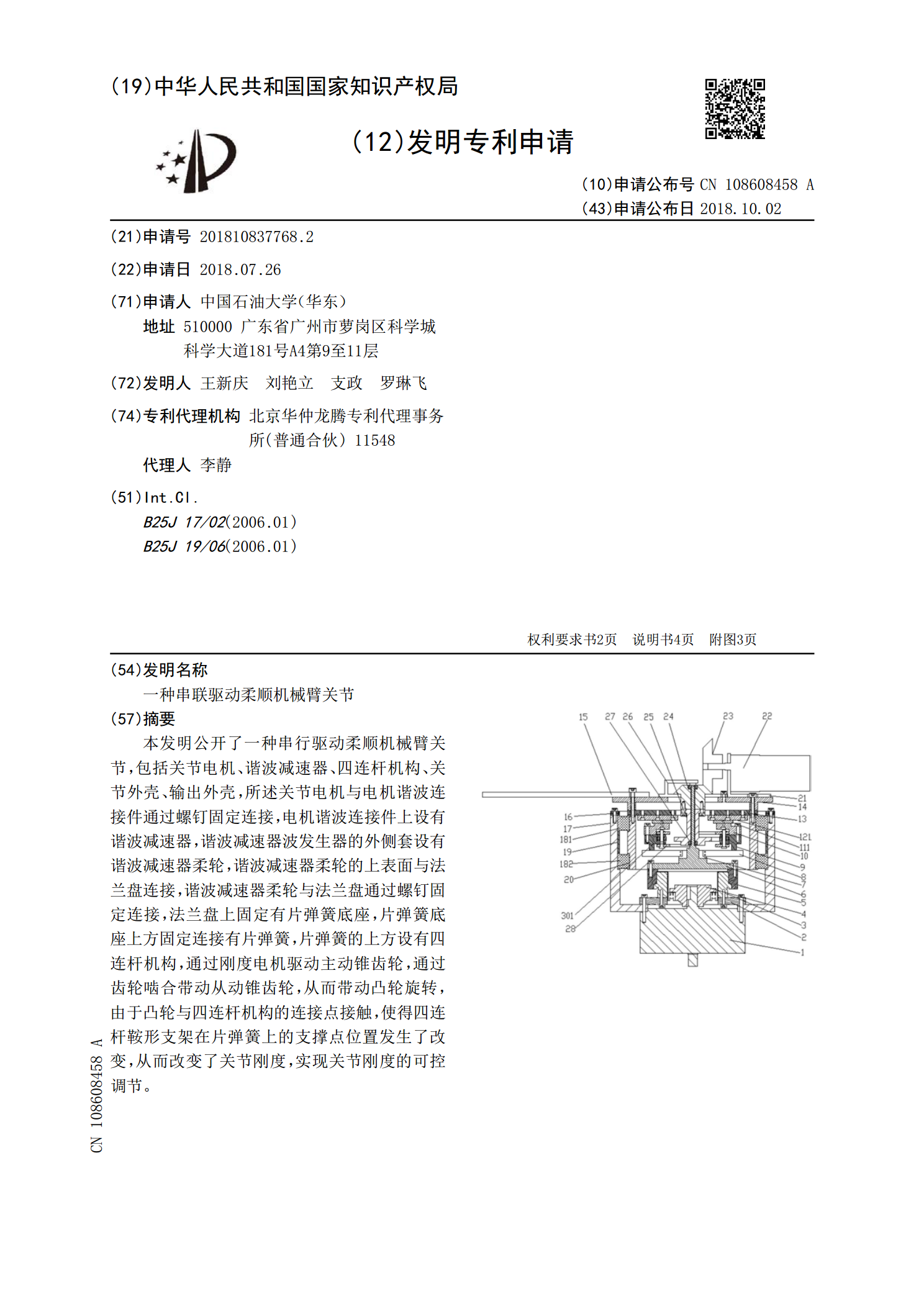
一种串联驱动柔顺机械臂关节.pdf
本发明公开了一种串行驱动柔顺机械臂关节,包括关节电机、谐波减速器、四连杆机构、关节外壳、输出外壳,所述关节电机与电机谐波连接件通过螺钉固定连接,电机谐波连接件上设有谐波减速器,谐波减速器波发生器的外侧套设有谐波减速器柔轮,谐波减速器柔轮的上表面与法兰盘连接,谐波减速器柔轮与法兰盘通过螺钉固定连接,法兰盘上固定有片弹簧底座,片弹簧底座上方固定连接有片弹簧,片弹簧的上方设有四连杆机构,通过刚度电机驱动主动锥齿轮,通过齿轮啮合带动从动锥齿轮,从而带动凸轮旋转,由于凸轮与四连杆机构的连接点接触,使得四连杆鞍形支架