
多柔性关节轻型机械臂轴孔柔顺装配技术研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多柔性关节轻型机械臂轴孔柔顺装配技术研究.docx
多柔性关节轻型机械臂轴孔柔顺装配技术研究多柔性关节轻型机械臂轴孔柔顺装配技术研究摘要:多柔性关节轻型机械臂具有重量轻、柔性高等特点,在工业生产中具有广泛的应用前景。而机械臂的关键部件之一——轴孔柔顺装配技术的研究对于提高机械臂的稳定性和精度具有重要意义。本文通过对多柔性关节轻型机械臂的结构和装配要求进行分析,从而探究轴孔柔顺装配技术的研究内容和关键问题,并提出了相应的解决方案和优化策略。实验结果表明,采用此技术可以显著提高机械臂的柔性和精度,为实际应用提供了有力的支持。关键词:多柔性关节轻型机械臂;轴孔柔

基于力反馈的轴孔柔顺装配策略.pptx
汇报人:目录PARTONEPARTTWO轴孔装配的常见问题柔顺装配策略的定义和重要性力反馈技术的引入PARTTHREE力反馈技术的简要介绍力反馈在轴孔柔顺装配中的作用力反馈技术的实现方式PARTFOUR装配策略的设计原则装配策略的具体步骤策略实施中的关键因素策略实施案例分析PARTFIVE力反馈技术面临的挑战力反馈技术的发展趋势力反馈技术在其他领域的应用前景PARTSIX基于力反馈的轴孔柔顺装配策略的优势对实际生产的指导意义对未来研究的建议THANKYOU

柔性关节机械臂刚度的研究.docx
柔性关节机械臂刚度的研究随着机器人技术的不断发展,机器人在各个领域都有着广泛应用,机器人的关节结构是机器人中最重要的部分之一。关节的刚度是机器人能够完成复杂任务的关键因素之一。本次论文将主要对柔性关节机械臂刚度进行研究。一、柔性关节机械臂柔性关节机械臂是一种新型的机械臂,它与传统刚性机械臂相比,主要区别在于其具有柔性关节,这种设计可以有效地减小机械臂在工作时的惯性力和摩擦力,从而提高机械臂的运动速度和精度。柔性关节机械臂通常是由弯曲传感器和柔性电缆等组成,这些组件可以大大增强机器人的稳定性和精度。二、柔性
一种串联驱动柔顺机械臂关节.pdf
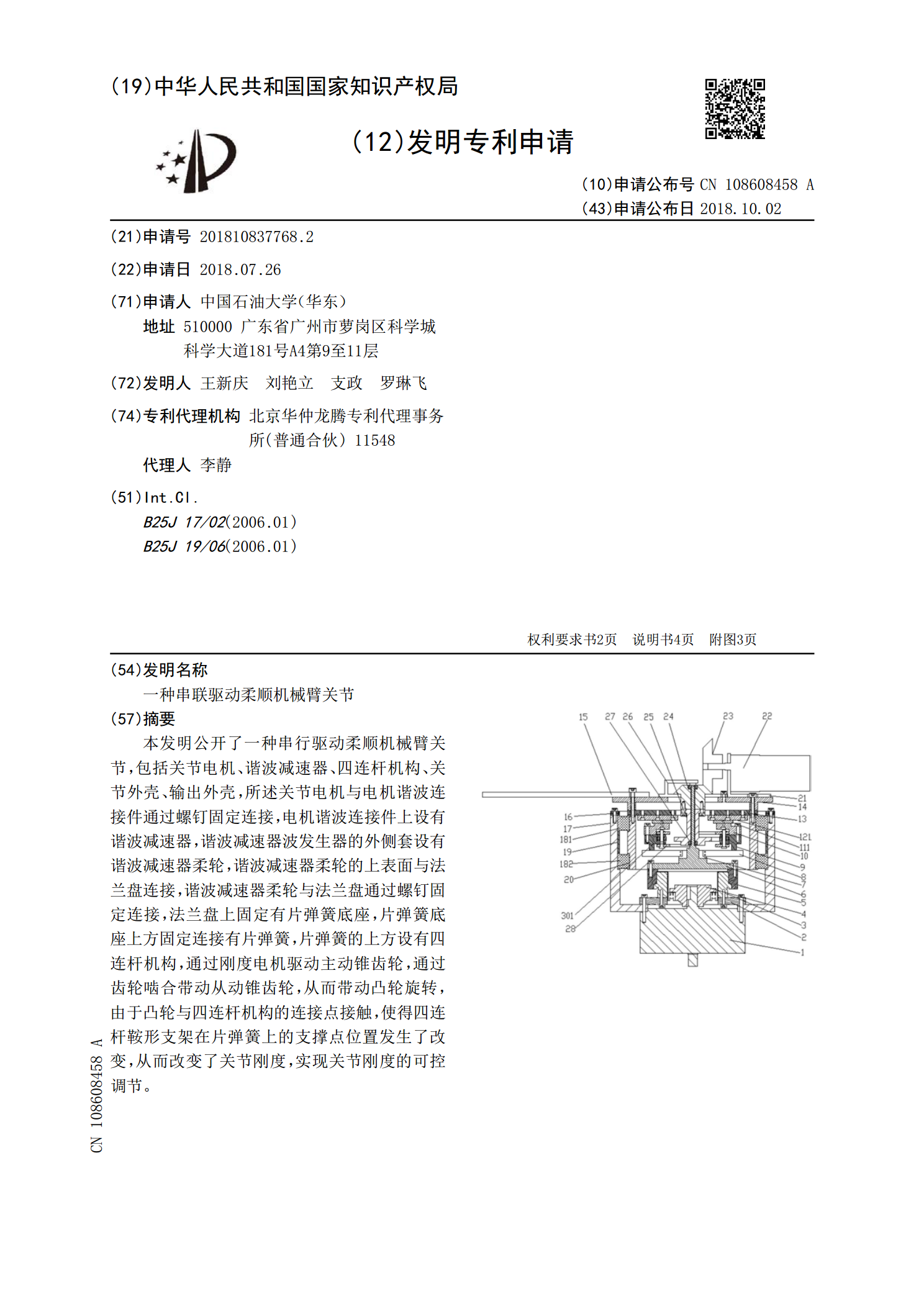
本发明公开了一种串行驱动柔顺机械臂关节,包括关节电机、谐波减速器、四连杆机构、关节外壳、输出外壳,所述关节电机与电机谐波连接件通过螺钉固定连接,电机谐波连接件上设有谐波减速器,谐波减速器波发生器的外侧套设有谐波减速器柔轮,谐波减速器柔轮的上表面与法兰盘连接,谐波减速器柔轮与法兰盘通过螺钉固定连接,法兰盘上固定有片弹簧底座,片弹簧底座上方固定连接有片弹簧,片弹簧的上方设有四连杆机构,通过刚度电机驱动主动锥齿轮,通过齿轮啮合带动从动锥齿轮,从而带动凸轮旋转,由于凸轮与四连杆机构的连接点接触,使得四连杆鞍形支架

柔性关节机械臂振动抑制研究.docx
柔性关节机械臂振动抑制研究柔性关节机械臂振动抑制研究摘要:柔性关节机械臂具有较高的自由度和灵活性,但在操作过程中常伴随着振动问题,影响着其精准性和稳定性。本文针对柔性关节机械臂振动抑制问题,从振动机理、振动分析和振动控制等方面进行综述和研究,并提出相应的解决方案。通过分析机械臂振动的来源,可以明确振动问题是由柔性关节系统的固有振动、外界扰动以及非线性特性引起的。在振动分析方面,采用模态分析和有限元分析等方法,识别关键振动模态,并确定振动频率和幅值的特性。在振动控制方面,通过选择合适的控制策略、设计合理的控