
空间连续体机械臂运动学分析与末端控制方法.docx

02****gc


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共40页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

空间连续体机械臂运动学分析与末端控制方法.docx
空间连续体机械臂运动学分析与末端控制方法第一章绪论随着科技的不断发展,空间连续体机械臂在航空航天、机器人制造、工业自动化等领域的应用越来越广泛。空间连续体机械臂作为一种具有高度灵活性和精确性的操作工具,已经成为现代制造业中不可或缺的重要组成部分。由于空间连续体机械臂的结构复杂、运动轨迹多变,对其进行运动学分析和末端控制具有很大的挑战性。研究空间连续体机械臂的运动学分析方法和末端控制策略,对于提高其性能和应用范围具有重要的理论和实际意义。本章主要围绕空间连续体机械臂的运动学分析与末端控制方法展开讨论。通过对

空间连续型机械臂设计与运动学仿真.docx
空间连续型机械臂设计与运动学仿真论文题目:空间连续型机械臂设计与运动学仿真摘要:随着科学技术的不断发展,机械臂在工业、医疗、航空等领域得到了广泛应用。本论文针对空间连续型机械臂的设计与运动学仿真进行研究。首先,通过对机械臂的结构和工作原理进行分析,确定了机械臂的基本参数。然后,利用运动学理论对机械臂的运动学进行建模和仿真。最后,通过对仿真结果的分析,验证了所设计的空间连续型机械臂的运动学性能。关键词:空间连续型机械臂、设计、运动学、仿真1.引言机械臂作为一种具有多自由度、可控性强、操作能力高的装置,在工业

空间约束下多关节机械臂架末端柔顺控制方法.docx
空间约束下多关节机械臂架末端柔顺控制方法1.内容综述随着空间探索和技术的发展,多关节机械臂在空间任务中扮演着越来越重要的角色。由于空间环境的复杂性和不确定性,传统的刚性控制方法难以满足高精度和高稳定性的要求。研究空间约束下多关节机械臂架末端柔顺控制方法具有重要的理论意义和实际应用价值。柔性控制理论得到了广泛关注和发展,成为解决柔性机械系统控制问题的有效手段。柔顺控制方法通过引入柔性模型,将系统的不确定性纳入控制策略中,从而有效地减小误差和提高系统性能。在空间约束环境下,机械臂的柔顺控制仍面临诸多挑战。空间
基于末端工作空间的仿人机械臂的跟随控制方法及系统.pdf
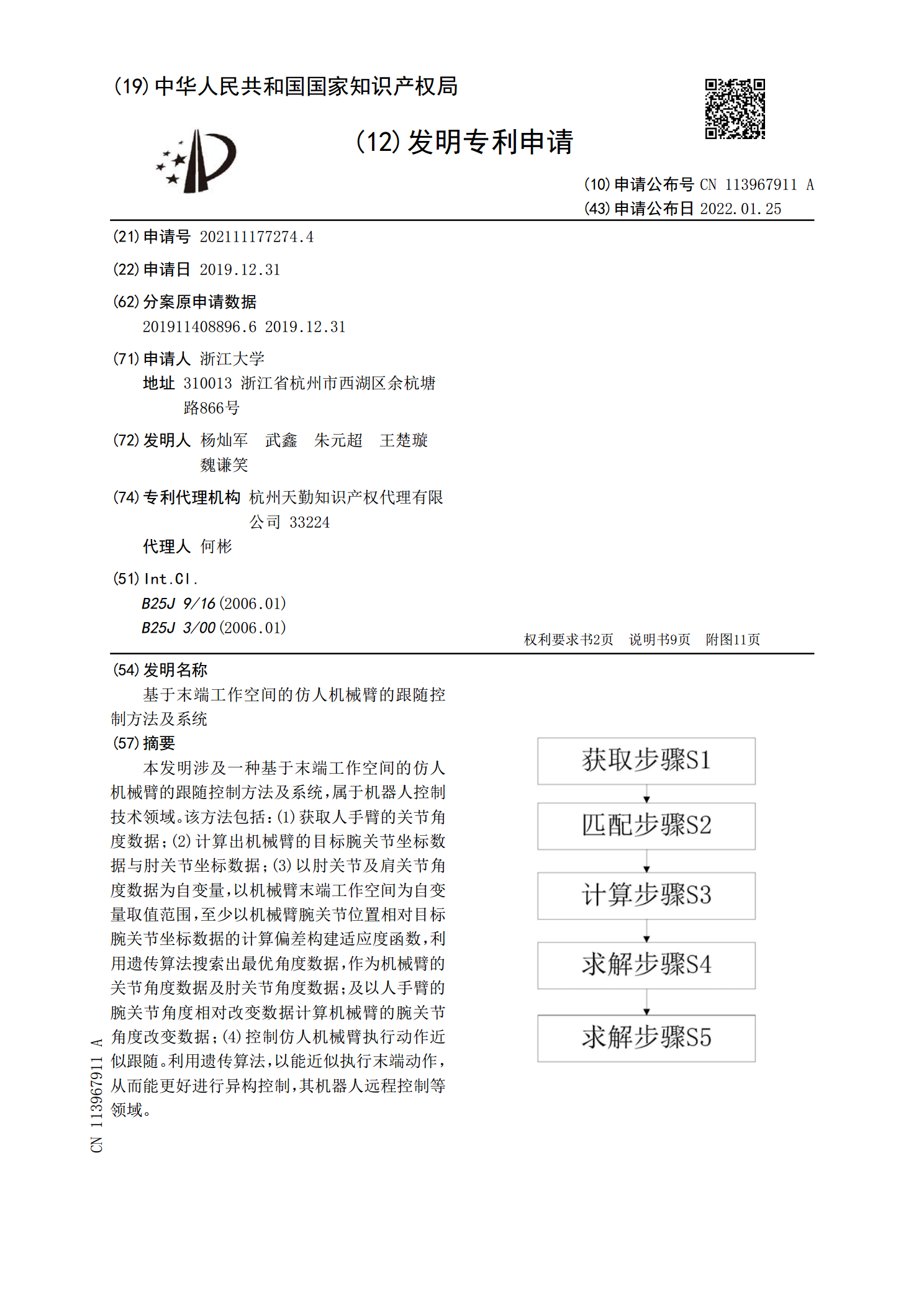
本发明涉及一种基于末端工作空间的仿人机械臂的跟随控制方法及系统,属于机器人控制技术领域。该方法包括:(1)获取人手臂的关节角度数据;(2)计算出机械臂的目标腕关节坐标数据与肘关节坐标数据;(3)以肘关节及肩关节角度数据为自变量,以机械臂末端工作空间为自变量取值范围,至少以机械臂腕关节位置相对目标腕关节坐标数据的计算偏差构建适应度函数,利用遗传算法搜索出最优角度数据,作为机械臂的关节角度数据及肘关节角度数据;及以人手臂的腕关节角度相对改变数据计算机械臂的腕关节角度改变数据;(4)控制仿人机械臂执行动作近似跟

线牵连续型机械臂运动学分析.docx
线牵连续型机械臂运动学分析机械臂是一种用于进行复杂动作的机械装置,广泛应用于工业生产、医疗、仓储等领域。而机械臂的运动学分析则是探究机械臂如何在三维空间中进行运动的重要问题。其中,线牵连续型机械臂是一种特殊类型的机械臂,其运动方式与传统的关节驱动型机械臂有所不同。本文将着重介绍线牵连续型机械臂的运动学分析,并对其应用前景进行探讨。一、线牵连续型机械臂的基本结构及运动方式线牵连续型机械臂的基本结构包括臂架、绳索、绳索张力调节装置、末端执行器等部分。其基本运动方式是通过控制绳索的张力和相对位置变化来实现机械臂