
基于EIV模型的点线位姿估计研究的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于EIV模型的点线位姿估计研究的综述报告.docx
基于EIV模型的点线位姿估计研究的综述报告随着计算机视觉技术的不断发展,点线位姿估计在工业、机器人、军事领域等方面得到了广泛的应用。点线位姿估计是指在二维或三维空间中通过检测点、线等基本几何元素,估计目标物体的姿态信息。在工业中,点线位姿估计被广泛应用于计算机视觉导航、自适应机器人等领域。在军事领域中,点线位姿估计被用于目标检测、目标跟踪等方面。在本综述报告中,将针对基于EIV模型的点线位姿估计研究进行分析和总结。1.EIV模型的基本理论EIV(Errors-In-Variables)模型是指在估计过程中

基于特征点对的位姿估计方法研究的综述报告.docx
基于特征点对的位姿估计方法研究的综述报告特征点对是计算机视觉中广泛使用的一种简单而有效的方法,用于位姿估计、目标检测、匹配等领域。在本篇综述中,我们将主要探讨基于特征点对的位姿估计方法的研究进展和应用。一、特征点对的定义和分类特征点对是指从图像中提取出来的具有独特性质和描述性特征的图像点对,通常被用于描述图像中的目标物体。常见的特征点对包括图像中的角点、边缘、斑块等。特征点对的分类可以按照特征点的类别、选择和匹配的方式等多种角度进行。按照特征点的类别来看,可分为SIFT、SURF、ORB等几种类型。按照选
基于YOLOv4-tiny模型的工件类别与位姿估计方法.pdf
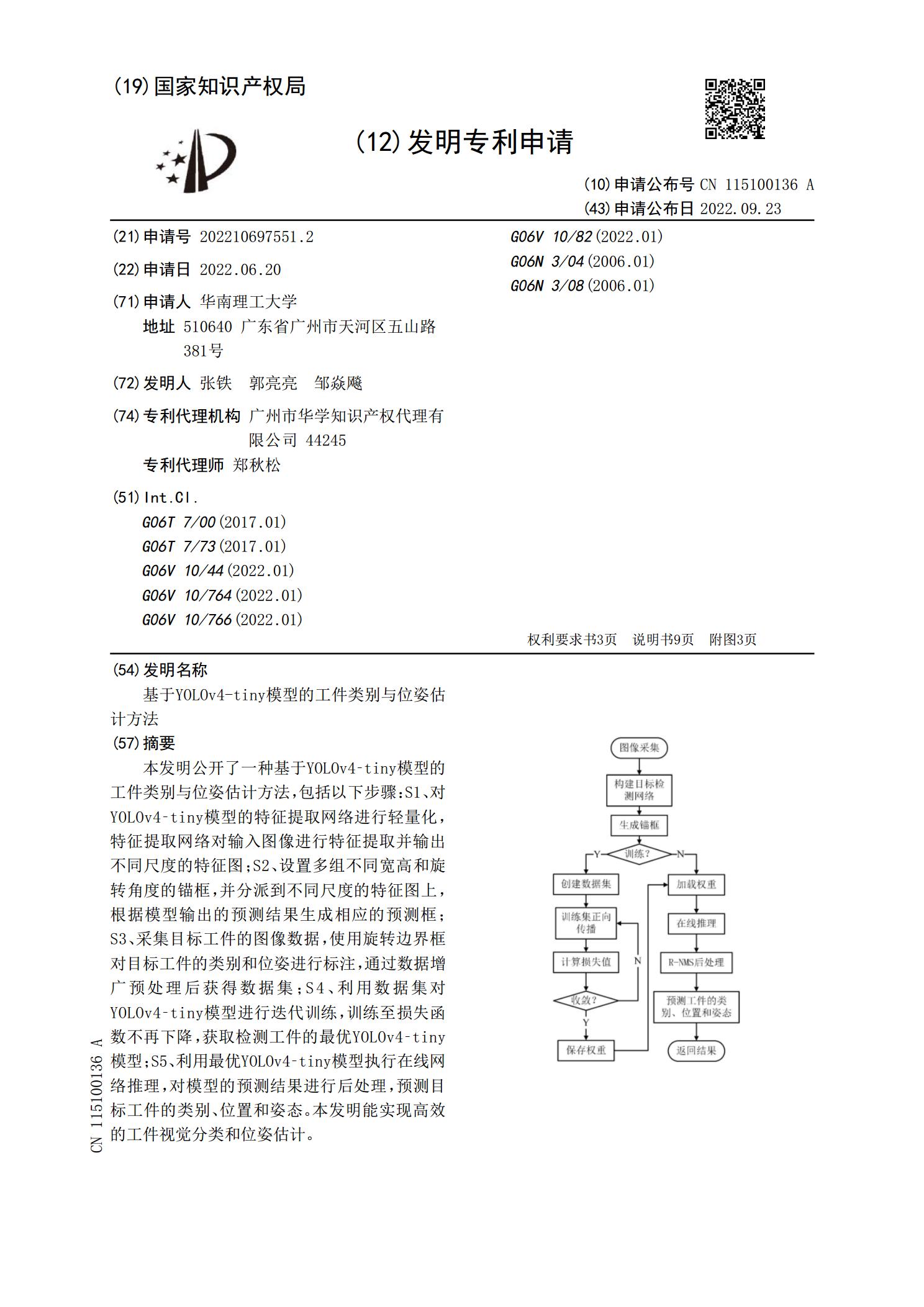
本发明公开了一种基于YOLOv4‑tiny模型的工件类别与位姿估计方法,包括以下步骤:S1、对YOLOv4‑tiny模型的特征提取网络进行轻量化,特征提取网络对输入图像进行特征提取并输出不同尺度的特征图;S2、设置多组不同宽高和旋转角度的锚框,并分派到不同尺度的特征图上,根据模型输出的预测结果生成相应的预测框;S3、采集目标工件的图像数据,使用旋转边界框对目标工件的类别和位姿进行标注,通过数据增广预处理后获得数据集;S4、利用数据集对YOLOv4‑tiny模型进行迭代训练,训练至损失函数不再下降,获取检测
基于激光雷达的移动机器人位姿估计方法综述.pdf

基于视觉惯性位姿估计和稠密分割网络的语义SLAM方法研究的开题报告.docx
基于视觉惯性位姿估计和稠密分割网络的语义SLAM方法研究的开题报告一、选题背景和意义:SLAM(SimultaneousLocalizationandMapping)是一种重要的机器人视觉领域的研究,在机器人导航、自动驾驶等领域有着广泛应用。为了实现机器人在未知环境中的实时定位和地图构建,SLAM方法需要综合利用传感器数据和运动模型来计算机器人在三维空间中的位姿。视觉SLAM则是指利用视觉传感器(如摄像头)来进行SLAM,具有成本低、视野广、信息丰富等优点,因此近年来备受关注。近年来,语义SLAM(Sem