
基于位姿参数估计的多视角点云配准方法.docx

02****gc


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于位姿参数估计的多视角点云配准方法.docx
基于位姿参数估计的多视角点云配准方法1.内容概要本文提出了一种基于位姿参数估计的多视角点云配准方法,旨在解决多视角图像在三维重建过程中可能出现的位姿一致性问题。该方法首先根据输入的多视角点云数据和相机标定信息,估计出每个相机的位姿参数。通过最小二乘法计算各个相机之间的位姿误差,并利用RANSAC算法去除异常值。根据得到的位姿参数对点云数据进行配准,从而实现多视角点云数据的融合。实验结果表明,该方法在处理具有不同姿态和尺度的多视角点云数据时具有较好的性能。1.1研究背景随着计算机视觉、机器人技术和虚拟现实等
基于非线性优化的多视角点云配准方法及系统.pdf
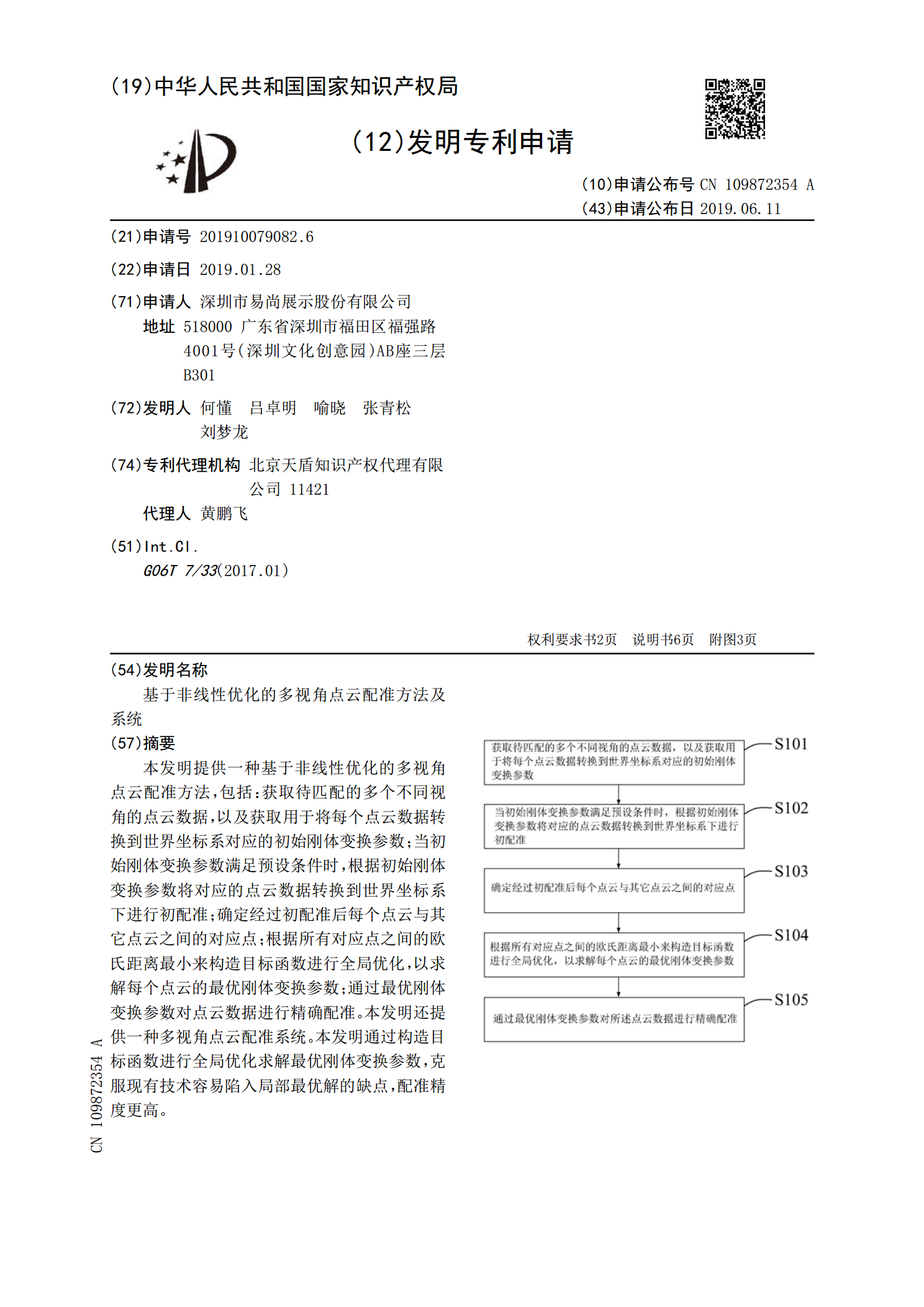
本发明提供一种基于非线性优化的多视角点云配准方法,包括:获取待匹配的多个不同视角的点云数据,以及获取用于将每个点云数据转换到世界坐标系对应的初始刚体变换参数;当初始刚体变换参数满足预设条件时,根据初始刚体变换参数将对应的点云数据转换到世界坐标系下进行初配准;确定经过初配准后每个点云与其它点云之间的对应点;根据所有对应点之间的欧氏距离最小来构造目标函数进行全局优化,以求解每个点云的最优刚体变换参数;通过最优刚体变换参数对点云数据进行精确配准。本发明还提供一种多视角点云配准系统。本发明通过构造目标函数进行全局

基于点云配准的中子谱仪系统工件位姿测量.pptx
汇报人:目录PARTONEPARTTWO点云配准的基本原理常用的点云配准方法点云配准的精度和稳定性PARTTHREE中子谱仪系统的应用领域中子谱仪系统的组成和工作原理中子谱仪系统在工件位姿测量中的应用现状PARTFOUR工件位姿测量的关键技术问题点云配准在中子谱仪系统工件位姿测量中的应用基于点云配准的中子谱仪系统工件位姿测量流程基于点云配准的中子谱仪系统工件位姿测量精度和误差分析PARTFIVE实验设备和方法实验结果和分析基于点云配准的中子谱仪系统工件位姿测量的优势和局限性PARTSIX本文的主要工作和结

基于语义分割和点云配准的物体检测与位姿估计.docx
基于语义分割和点云配准的物体检测与位姿估计标题:基于语义分割和点云配准的物体检测与位姿估计摘要:随着机器人和自动驾驶技术的不断发展,物体检测和位姿估计成为了计算机视觉领域的热门研究方向。本文提出了一种基于语义分割和点云配准的物体检测与位姿估计方法,该方法能够在复杂环境下准确可靠地检测出物体并估计其位姿。关键词:语义分割、点云配准、物体检测、位姿估计1.引言物体检测和位姿估计是计算机视觉和机器人领域的重要研究课题,对于实现自动驾驶、机器人操作以及增强现实等应用具有重要意义。传统的物体检测算法主要基于图像或特

基于深度学习的室内多视角点云自动化配准方法.docx
基于深度学习的室内多视角点云自动化配准方法目录一、内容描述................................................21.研究背景及意义........................................31.1室内多视角点云配准的重要性.........................41.2深度学习在点云配准中的应用.........................52.研究现状及发展趋势................................