
激光视觉传感焊缝识别与自动跟踪系统的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

激光视觉传感焊缝识别与自动跟踪系统的中期报告.docx
激光视觉传感焊缝识别与自动跟踪系统的中期报告一、项目背景随着工业自动化的普及,激光焊接已经成为了现代焊接技术中非常重要的一部分。在激光焊接过程中,焊缝识别和自动跟踪是影响焊接质量和效率的重要因素,因此需要开发一套激光视觉传感焊缝识别与自动跟踪系统,实现对焊缝的精准识别和准确跟踪。二、项目目标本项目旨在研究和开发一套激光视觉传感焊缝识别与自动跟踪系统,实现以下目标:1.精准识别焊缝。通过激光传感器获取焊缝图像,并对焊缝图像进行处理和分析,提取出焊缝的特征信息,实现对焊缝的精准识别。2.实现自动跟踪。通过控制

基于图像识别的激光焊缝跟踪系统研究的中期报告.docx
基于图像识别的激光焊缝跟踪系统研究的中期报告本研究旨在开发一种基于图像识别的激光焊缝跟踪系统,实现对激光焊缝的自动跟踪和实时监测。首先,我们进行了对激光焊缝的成型过程和特点的研究。激光焊接是一种快速高效的焊接方法,但其焊接过程中容易产生变形、裂缝等问题,因此需要进行实时监测和控制。然后,我们设计了基于图像识别的激光焊缝跟踪系统框架。该系统由激光焊接机、相机、处理系统三部分组成。相机通过拍摄焊缝区域的图像,处理系统通过图像识别技术实现焊缝的自动跟踪和监测,从而对焊缝的形态、位置和质量进行实时监测。接着,我们
一种用于焊缝跟踪的单斜线激光视觉传感方法及系统.pdf
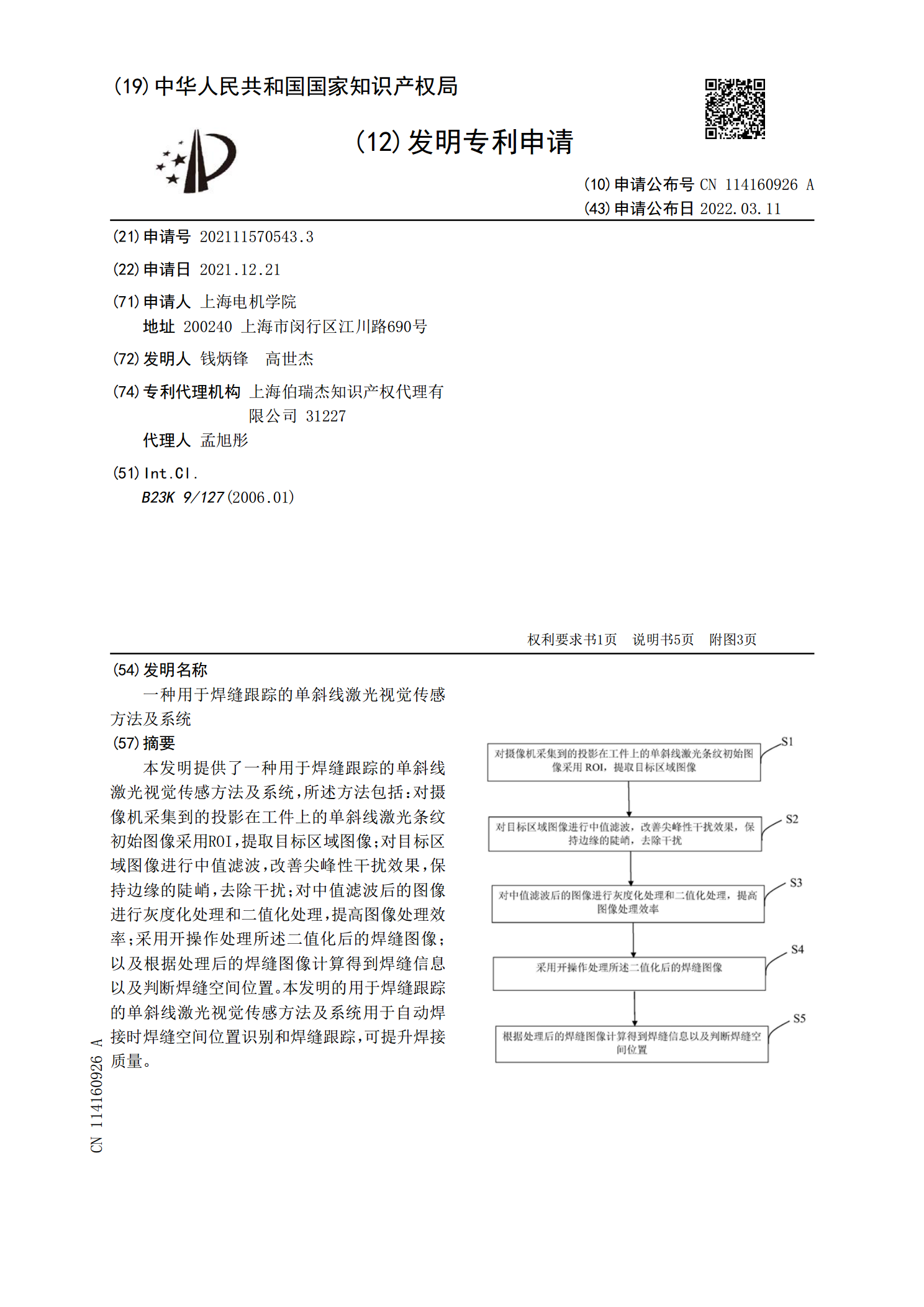
本发明提供了一种用于焊缝跟踪的单斜线激光视觉传感方法及系统,所述方法包括:对摄像机采集到的投影在工件上的单斜线激光条纹初始图像采用ROI,提取目标区域图像;对目标区域图像进行中值滤波,改善尖峰性干扰效果,保持边缘的陡峭,去除干扰;对中值滤波后的图像进行灰度化处理和二值化处理,提高图像处理效率;采用开操作处理所述二值化后的焊缝图像;以及根据处理后的焊缝图像计算得到焊缝信息以及判断焊缝空间位置。本发明的用于焊缝跟踪的单斜线激光视觉传感方法及系统用于自动焊接时焊缝空间位置识别和焊缝跟踪,可提升焊接质量。

基于图像传感技术的焊缝跟踪系统的中期报告.docx
基于图像传感技术的焊缝跟踪系统的中期报告一、项目概况焊缝跟踪系统是一种基于图像传感技术的智能化焊接辅助设备,可以用于自动搜寻焊缝,实现自主调节焊接参数,提高焊接质量和效率。本项目的目标是在现有的焊接设备上添加一个图像传感装置,实现焊缝跟踪和参数调节,并把实现过程录制下来。二、项目进展1.系统结构设计根据要求,设计出图像采集模块、图像预处理模块、焊接参数调节模块和控制模块四个模块,完成各模块的配置和窗体设计。2.图像采集模块通过OpenCV库实现对传感器拍摄的视频流的读取和解析,提取焊缝区域的特征点。3.图

基于视觉伺服的焊缝跟踪系统研究的中期报告.docx
基于视觉伺服的焊缝跟踪系统研究的中期报告一、研究背景:随着焊接技术的发展,焊接质量和效率成为焊接过程中的重要问题。焊缝跟踪系统是提高焊接效率和质量的重要手段之一,其通过对焊缝进行精准跟踪,实现焊接自动化和智能化。在焊缝跟踪系统中,视觉伺服是一种常用的控制方式,具有实时性好、鲁棒性强等特点,可以有效提高焊接的精度和稳定性。因此,基于视觉伺服的焊缝跟踪系统成为研究的热点之一。二、研究内容:1.系统架构设计本研究的焊缝跟踪系统采用了基于视觉伺服的控制方式。系统由图像采集模块、图像处理模块、控制模块和执行器模块四