
一种多自由度机械臂的动力驱动机构.pdf

努力****妙风


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多自由度机械臂的动力驱动机构.pdf
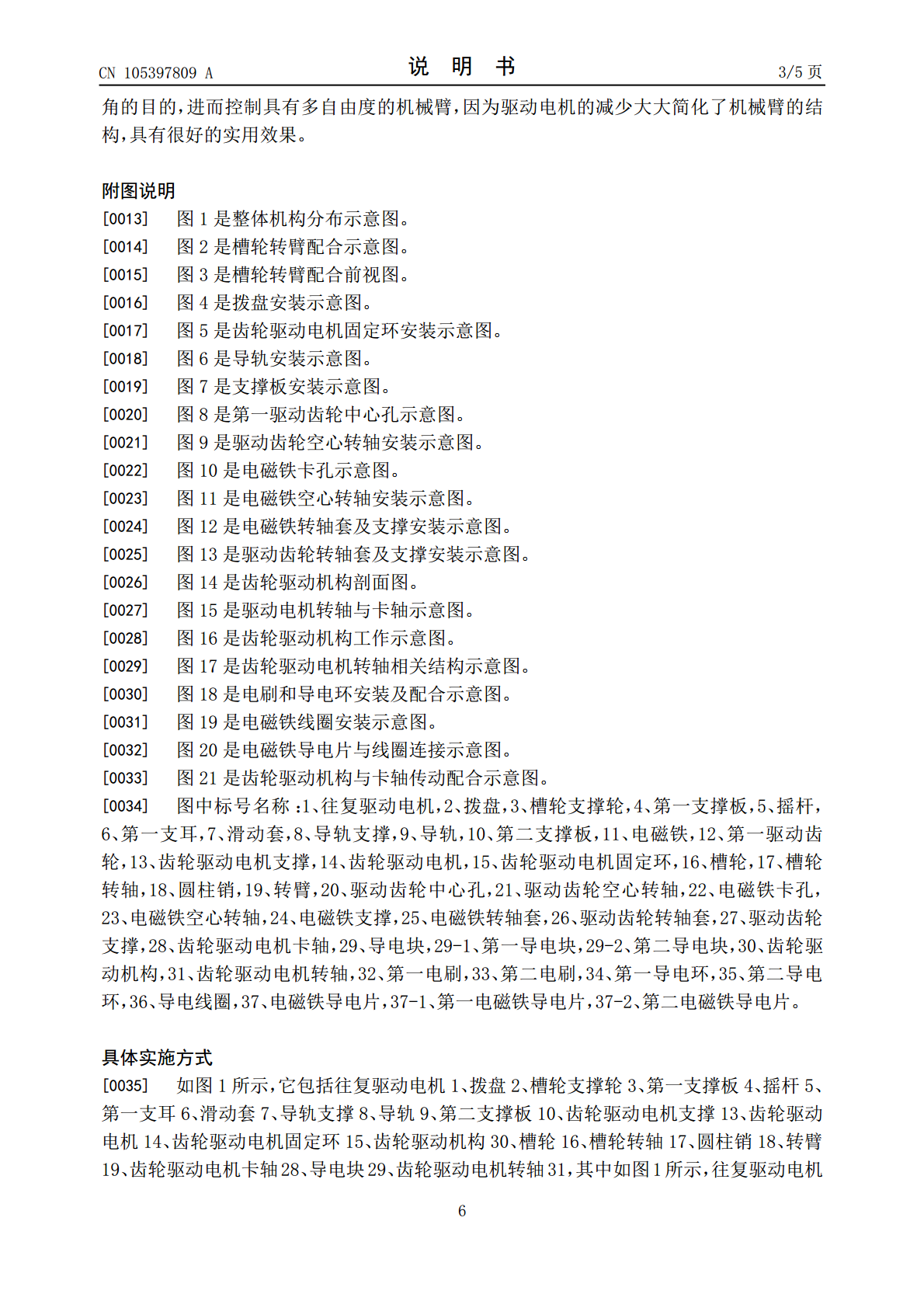
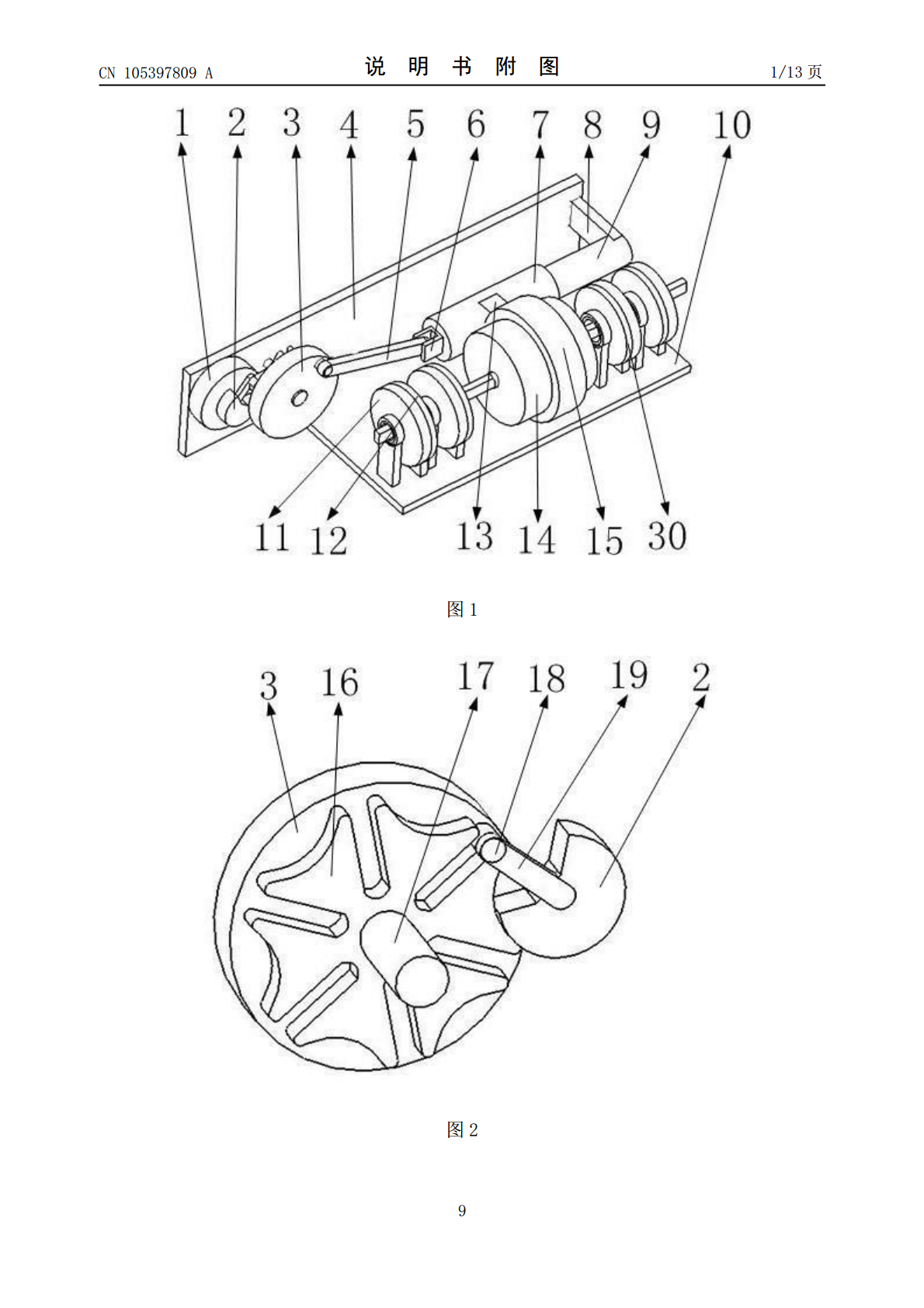
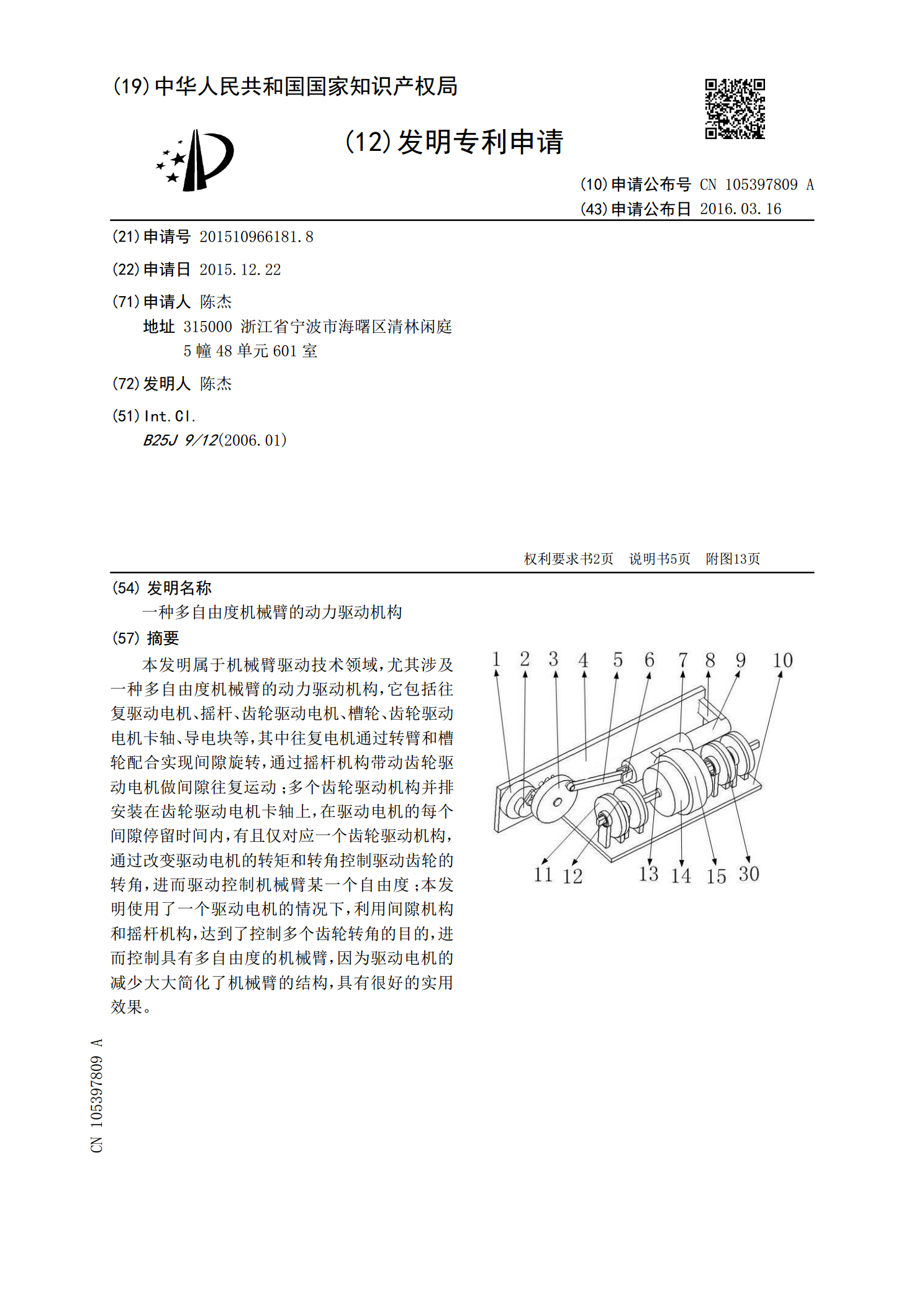
本发明属于机械臂驱动技术领域,尤其涉及一种多自由度机械臂的动力驱动机构,它包括往复驱动电机、摇杆、齿轮驱动电机、槽轮、齿轮驱动电机卡轴、导电块等,其中往复电机通过转臂和槽轮配合实现间隙旋转,通过摇杆机构带动齿轮驱动电机做间隙往复运动;多个齿轮驱动机构并排安装在齿轮驱动电机卡轴上,在驱动电机的每个间隙停留时间内,有且仅对应一个齿轮驱动机构,通过改变驱动电机的转矩和转角控制驱动齿轮的转角,进而驱动控制机械臂某一个自由度;本发明使用了一个驱动电机的情况下,利用间隙机构和摇杆机构,达到了控制多个齿轮转角的目的,进
一种双关节多自由度机械臂及其驱动方法.pdf
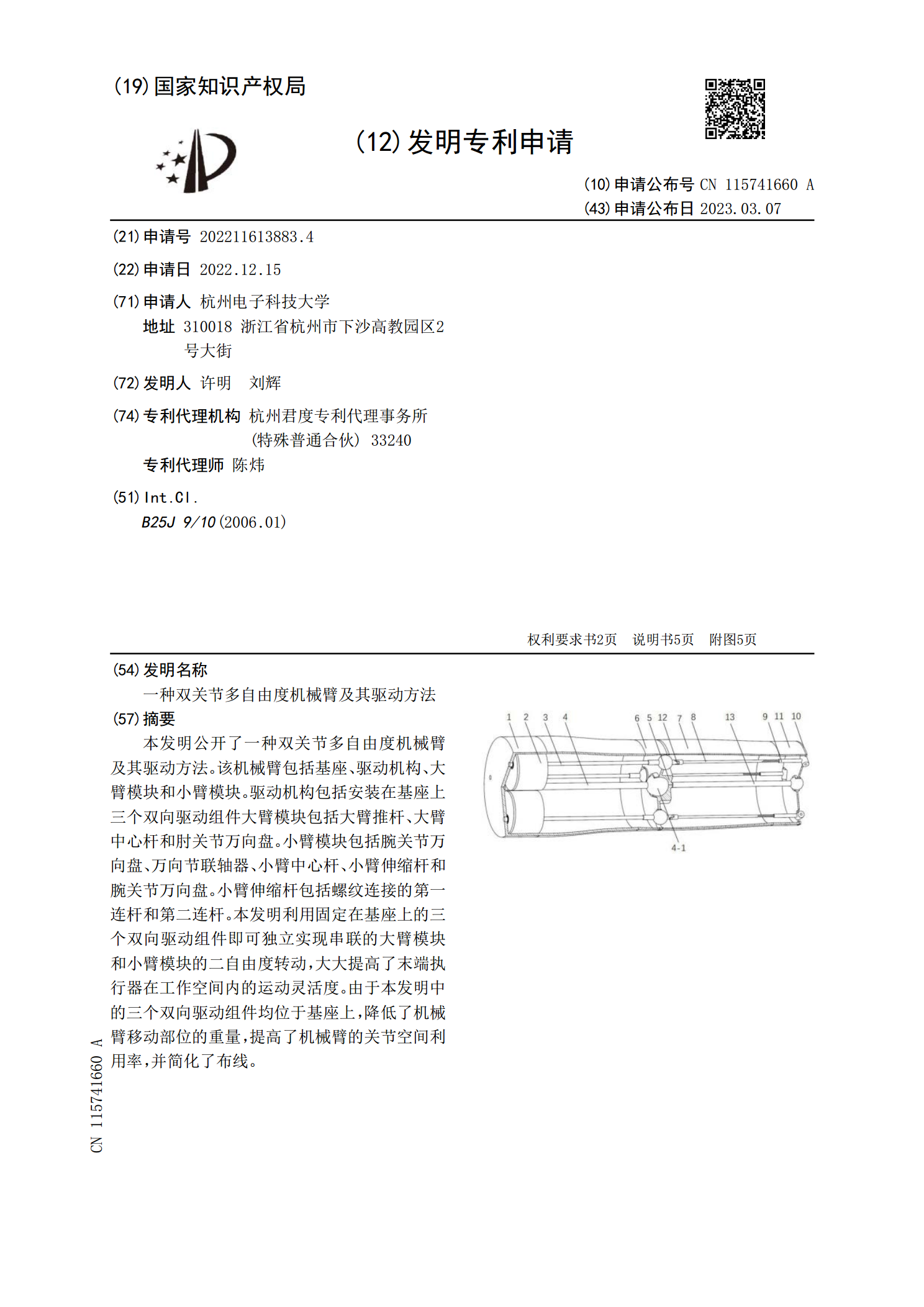
本发明公开了一种双关节多自由度机械臂及其驱动方法。该机械臂包括基座、驱动机构、大臂模块和小臂模块。驱动机构包括安装在基座上三个双向驱动组件大臂模块包括大臂推杆、大臂中心杆和肘关节万向盘。小臂模块包括腕关节万向盘、万向节联轴器、小臂中心杆、小臂伸缩杆和腕关节万向盘。小臂伸缩杆包括螺纹连接的第一连杆和第二连杆。本发明利用固定在基座上的三个双向驱动组件即可独立实现串联的大臂模块和小臂模块的二自由度转动,大大提高了末端执行器在工作空间内的运动灵活度。由于本发明中的三个双向驱动组件均位于基座上,降低了机械臂移动部位
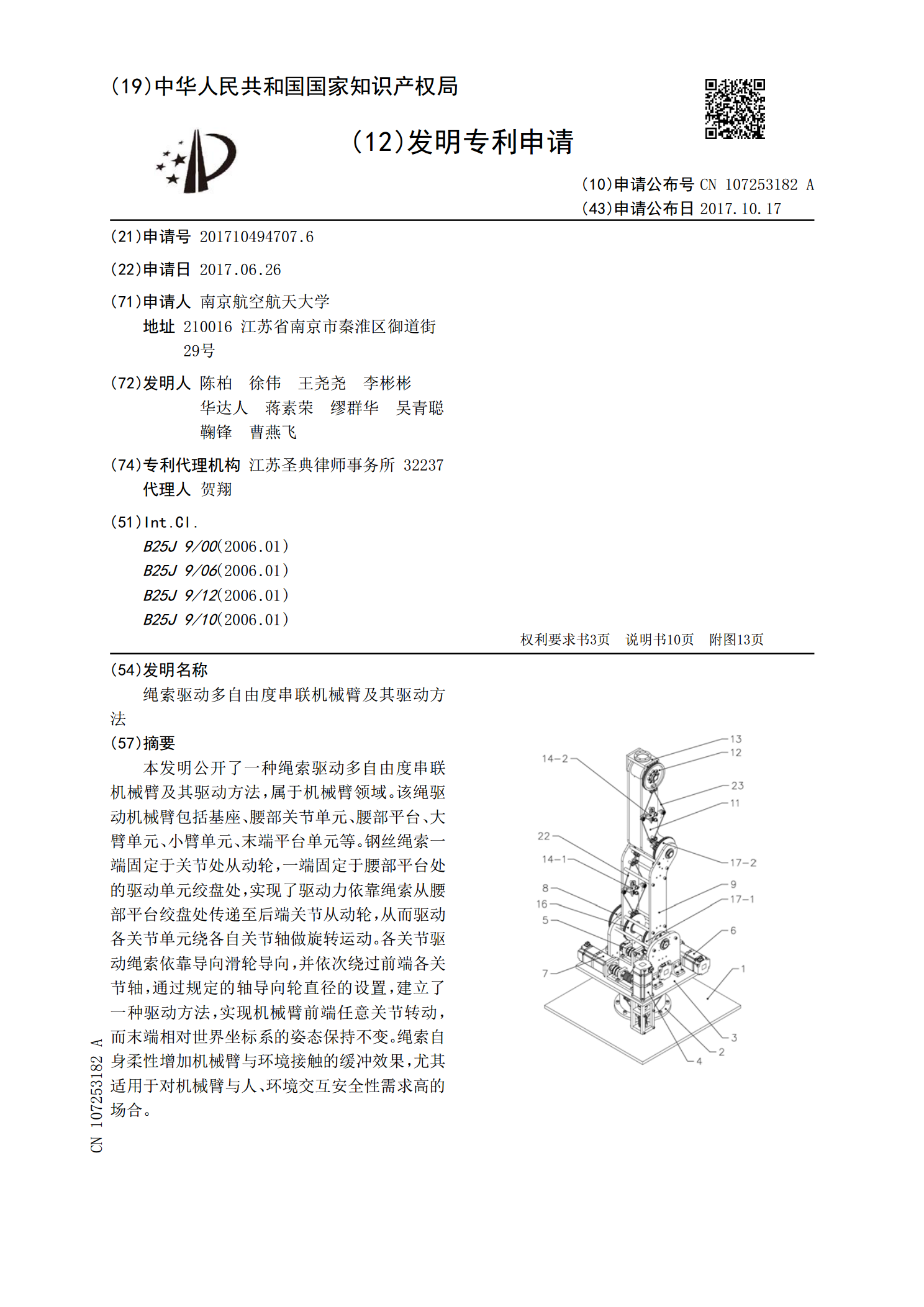
绳索驱动多自由度串联机械臂及其驱动方法.pdf
本发明公开了一种绳索驱动多自由度串联机械臂及其驱动方法,属于机械臂领域。该绳驱动机械臂包括基座、腰部关节单元、腰部平台、大臂单元、小臂单元、末端平台单元等。钢丝绳索一端固定于关节处从动轮,一端固定于腰部平台处的驱动单元绞盘处,实现了驱动力依靠绳索从腰部平台绞盘处传递至后端关节从动轮,从而驱动各关节单元绕各自关节轴做旋转运动。各关节驱动绳索依靠导向滑轮导向,并依次绕过前端各关节轴,通过规定的轴导向轮直径的设置,建立了一种驱动方法,实现机械臂前端任意关节转动,而末端相对世界坐标系的姿态保持不变。绳索自身柔性增
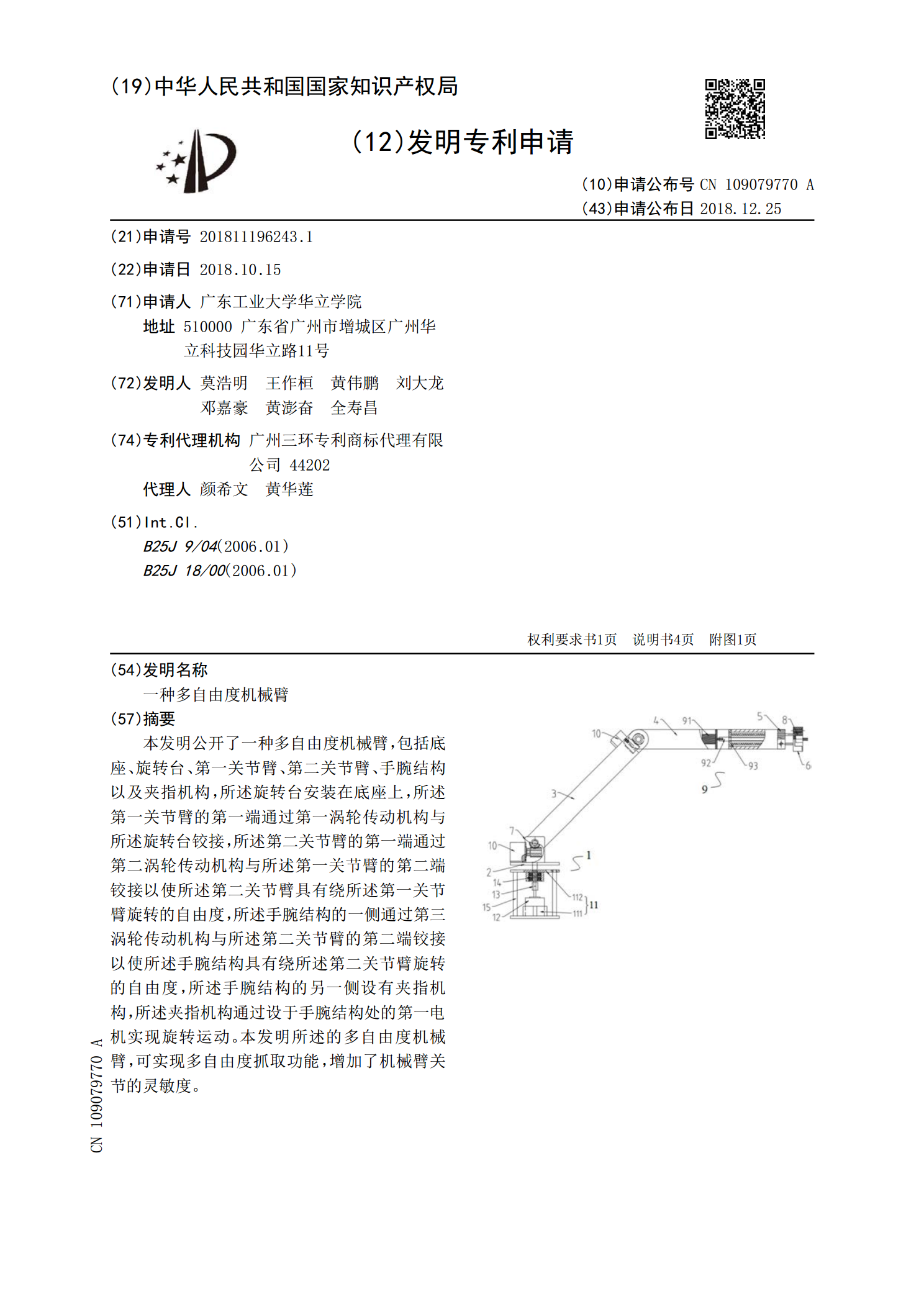
一种多自由度机械臂.pdf
本发明公开了一种多自由度机械臂,包括底座、旋转台、第一关节臂、第二关节臂、手腕结构以及夹指机构,所述旋转台安装在底座上,所述第一关节臂的第一端通过第一涡轮传动机构与所述旋转台铰接,所述第二关节臂的第一端通过第二涡轮传动机构与所述第一关节臂的第二端铰接以使所述第二关节臂具有绕所述第一关节臂旋转的自由度,所述手腕结构的一侧通过第三涡轮传动机构与所述第二关节臂的第二端铰接以使所述手腕结构具有绕所述第二关节臂旋转的自由度,所述手腕结构的另一侧设有夹指机构,所述夹指机构通过设于手腕结构处的第一电机实现旋转运动。本发
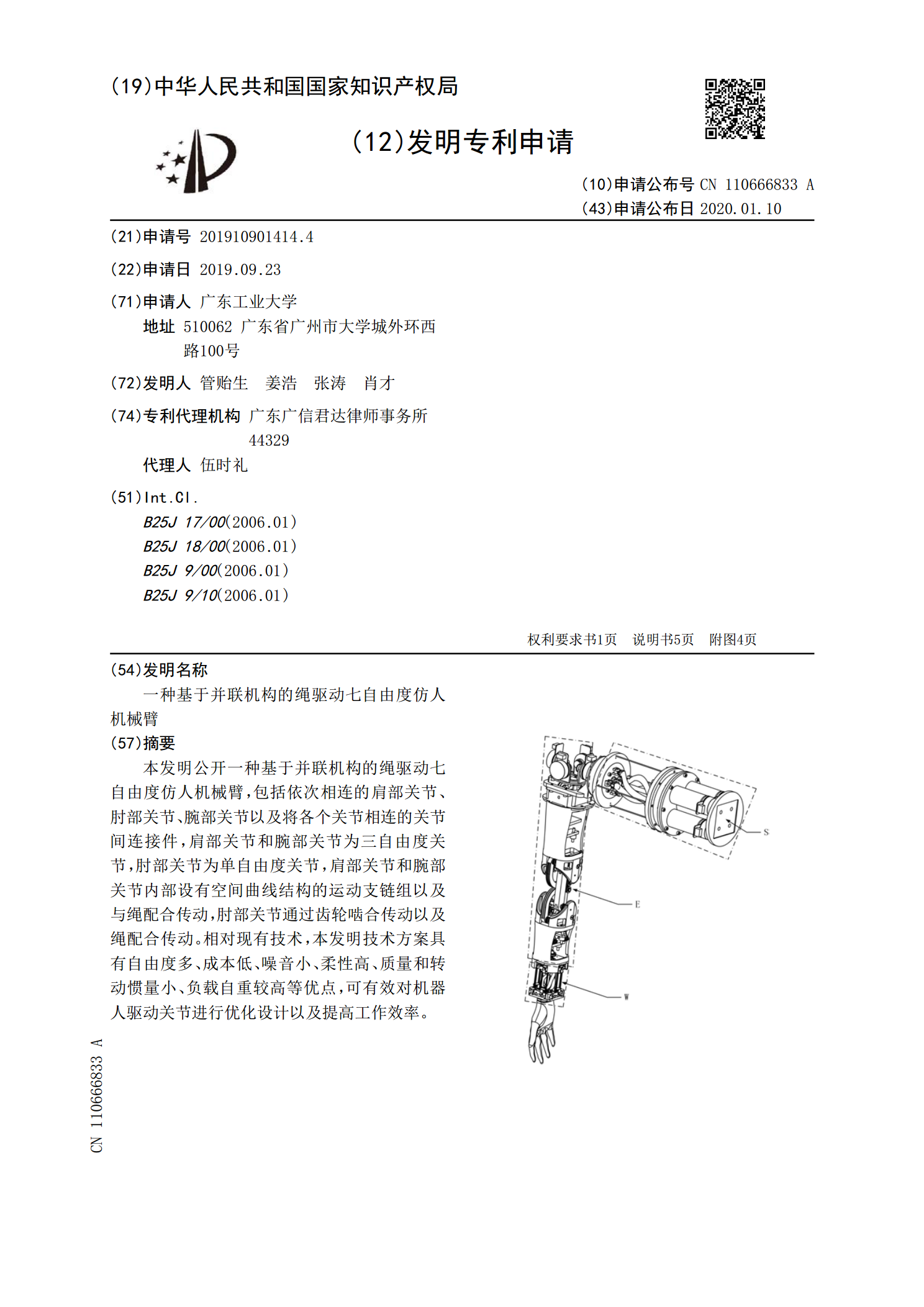
一种基于并联机构的绳驱动七自由度仿人机械臂.pdf
本发明公开一种基于并联机构的绳驱动七自由度仿人机械臂,包括依次相连的肩部关节、肘部关节、腕部关节以及将各个关节相连的关节间连接件,肩部关节和腕部关节为三自由度关节,肘部关节为单自由度关节,肩部关节和腕部关节内部设有空间曲线结构的运动支链组以及与绳配合传动,肘部关节通过齿轮啮合传动以及绳配合传动。相对现有技术,本发明技术方案具有自由度多、成本低、噪音小、柔性高、质量和转动惯量小、负载自重较高等优点,可有效对机器人驱动关节进行优化设计以及提高工作效率。