
一种基于并联机构的绳驱动七自由度仿人机械臂.pdf

明钰****甜甜

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于并联机构的绳驱动七自由度仿人机械臂.pdf
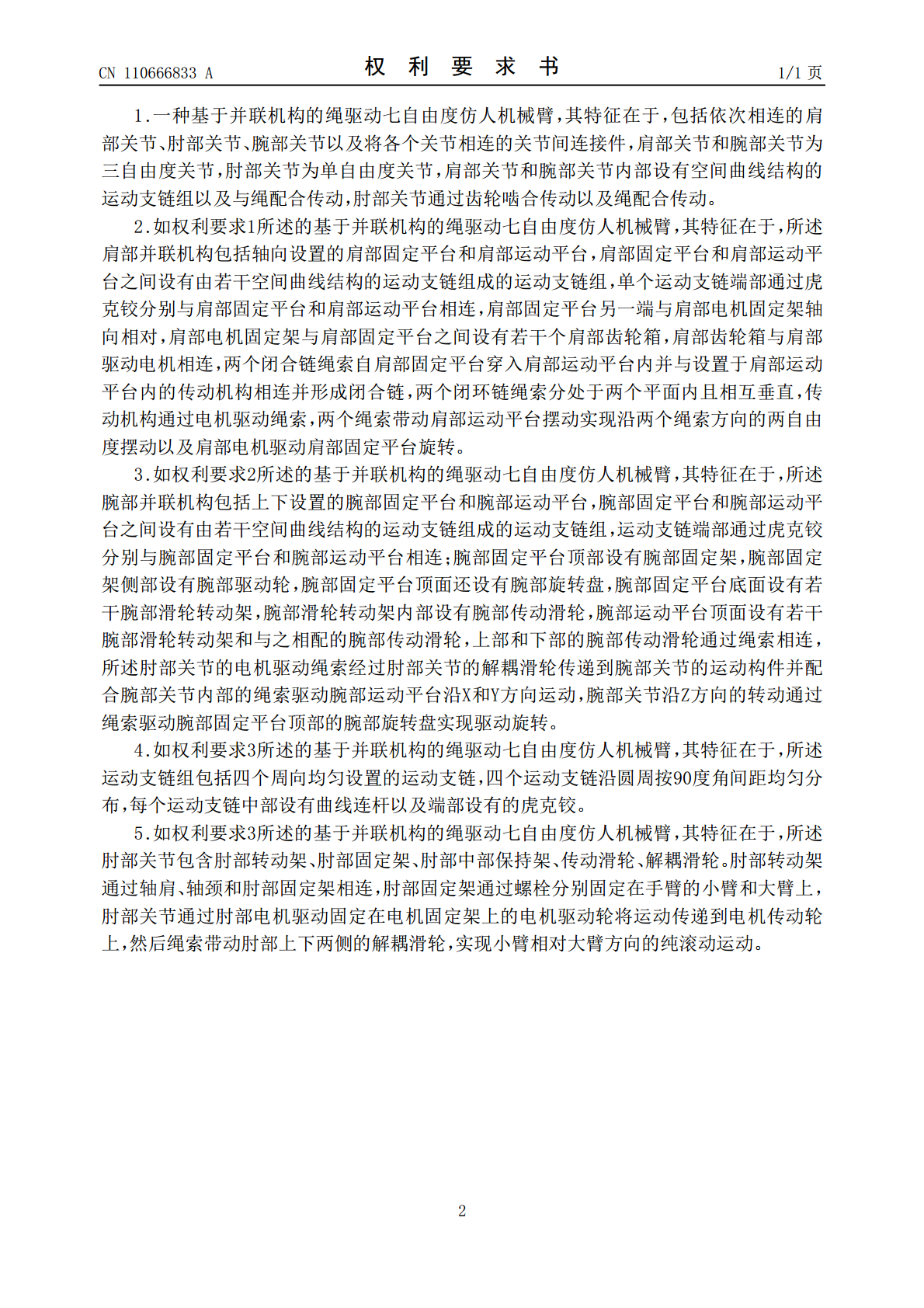
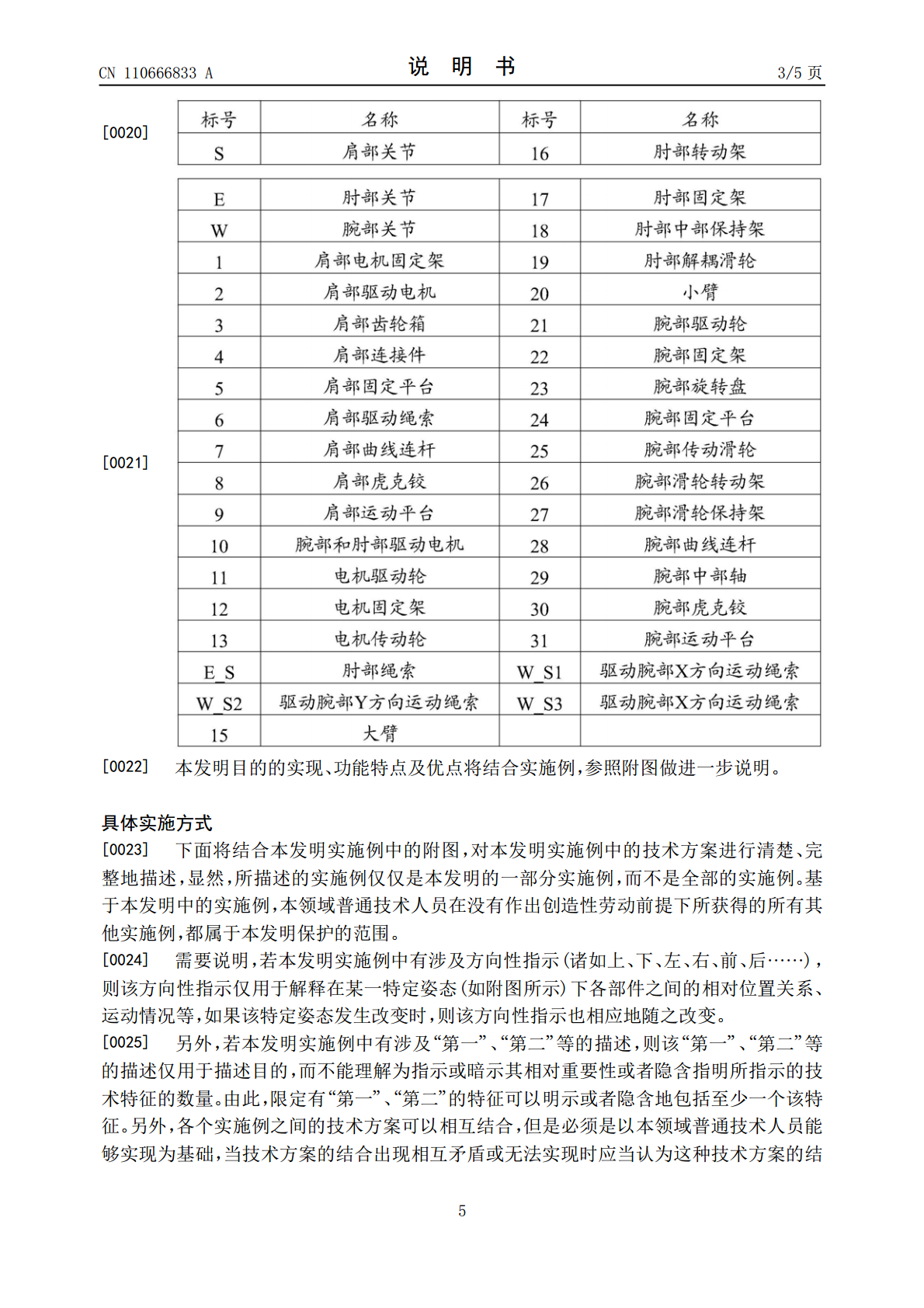
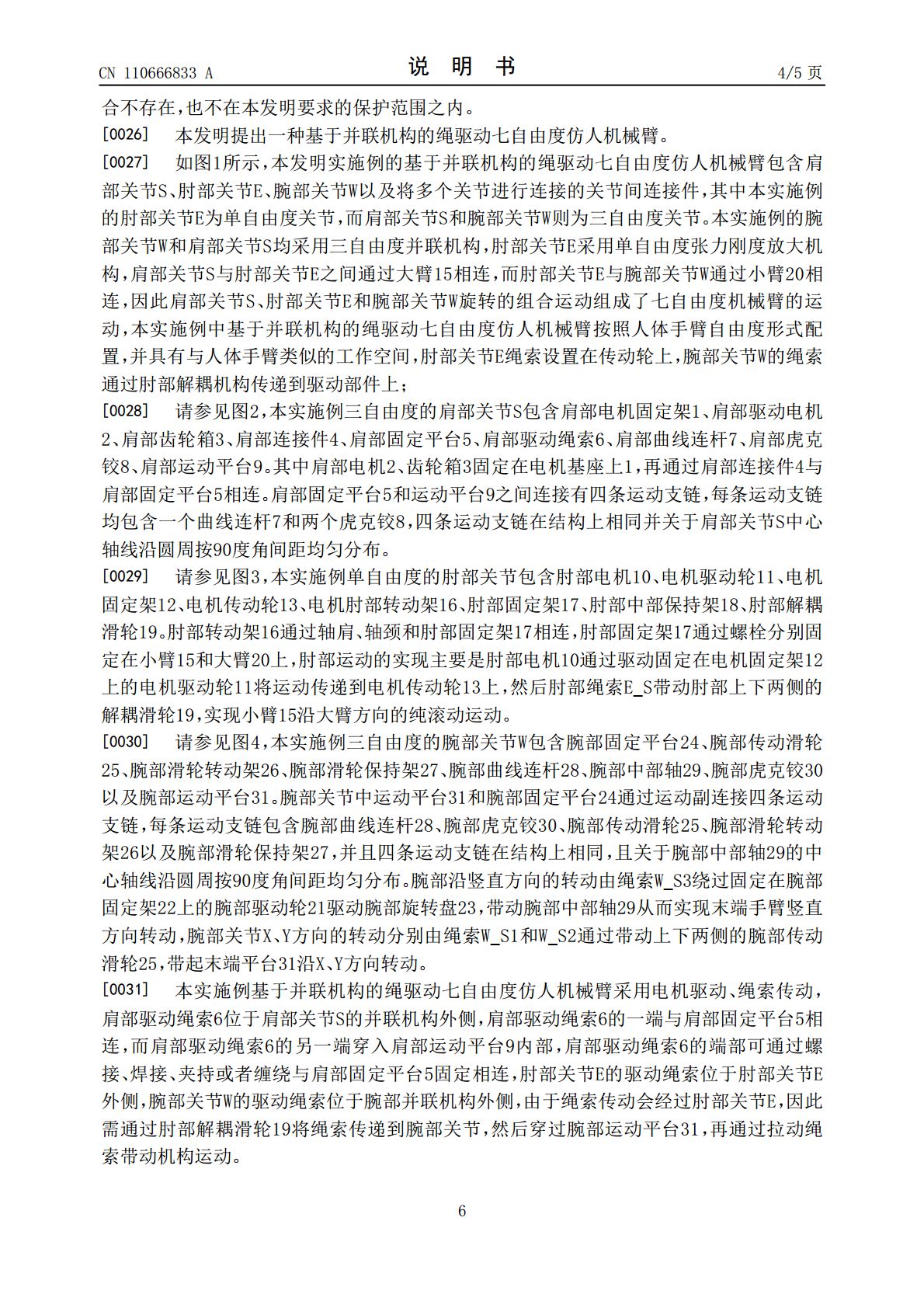
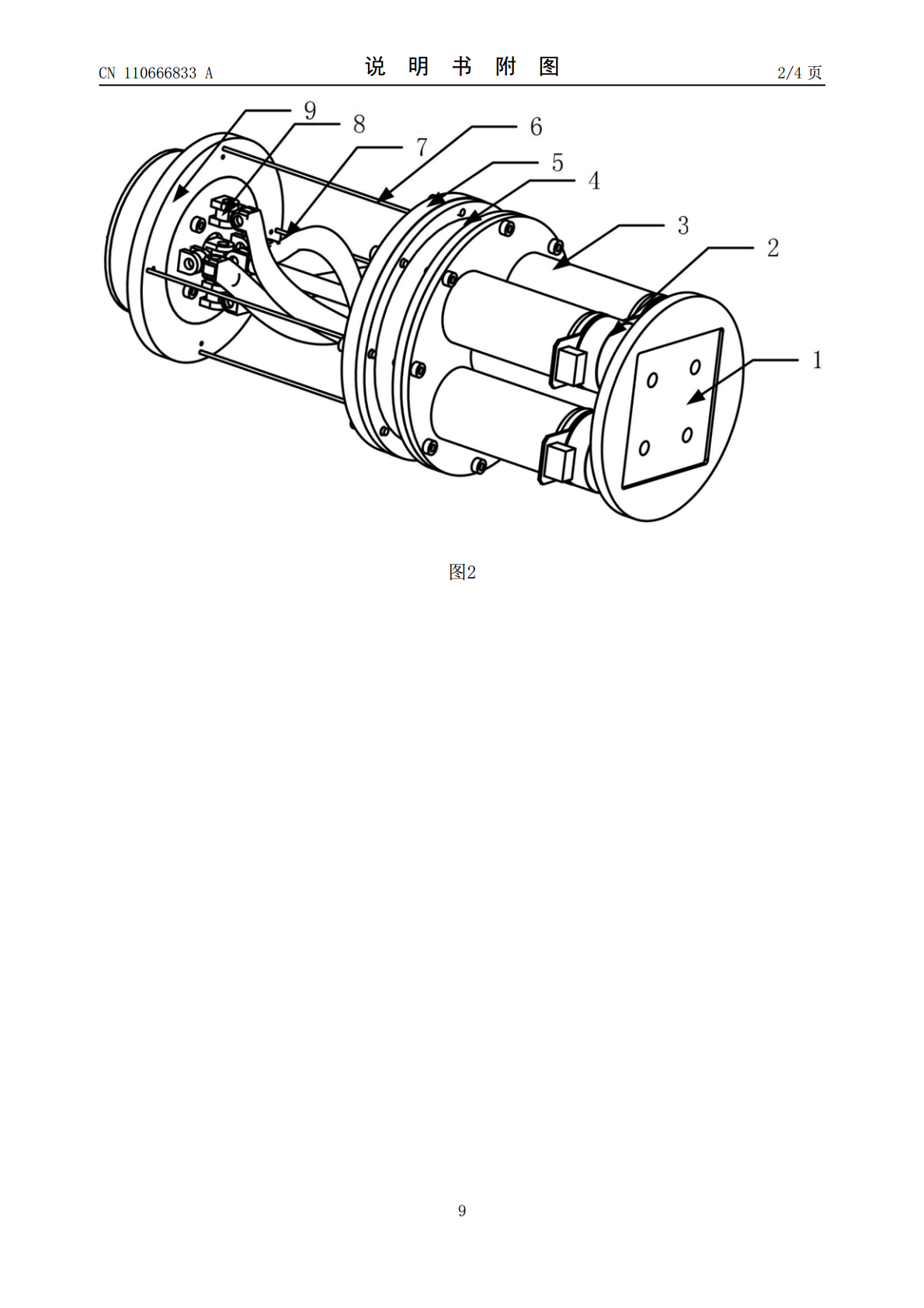
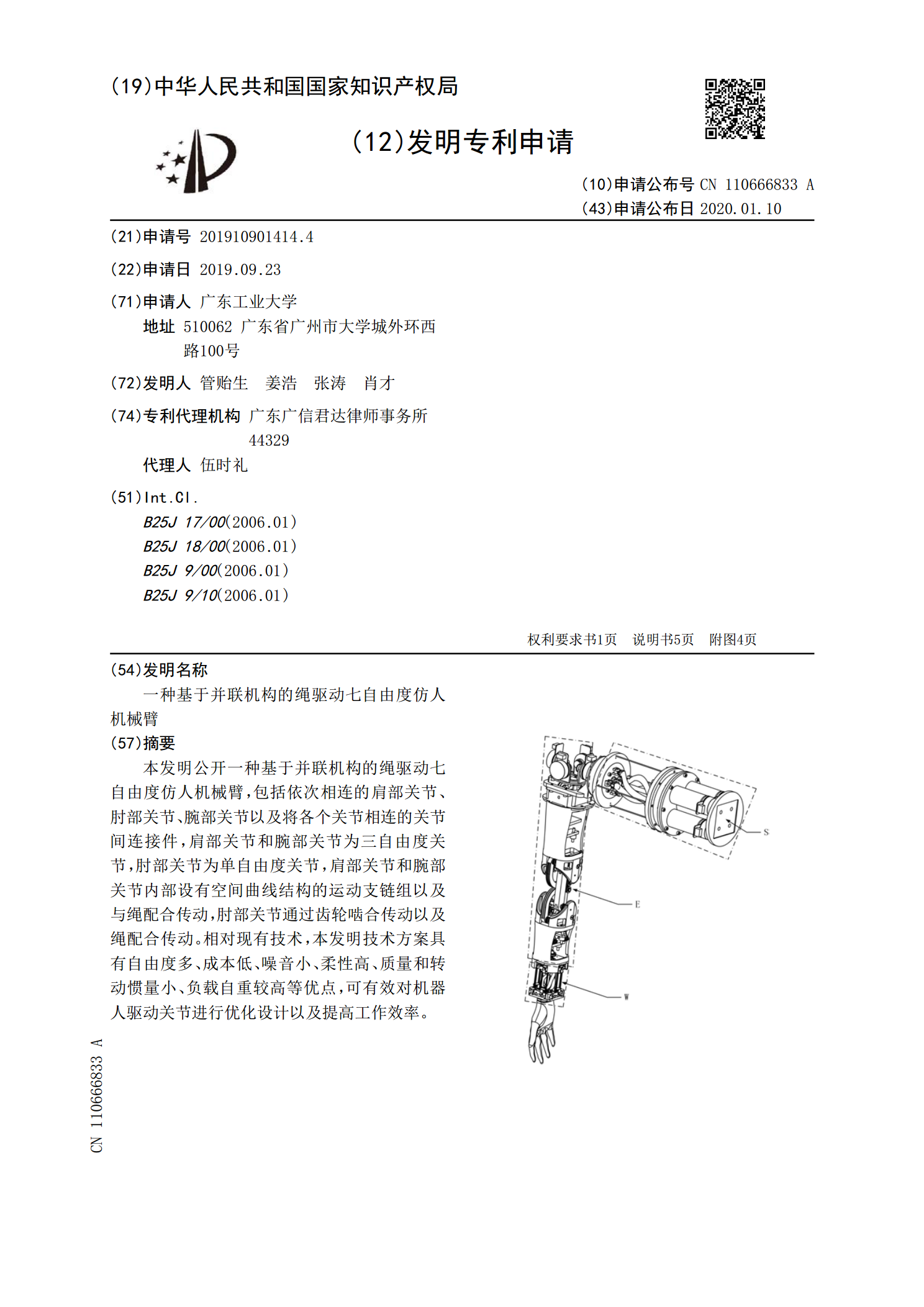
本发明公开一种基于并联机构的绳驱动七自由度仿人机械臂,包括依次相连的肩部关节、肘部关节、腕部关节以及将各个关节相连的关节间连接件,肩部关节和腕部关节为三自由度关节,肘部关节为单自由度关节,肩部关节和腕部关节内部设有空间曲线结构的运动支链组以及与绳配合传动,肘部关节通过齿轮啮合传动以及绳配合传动。相对现有技术,本发明技术方案具有自由度多、成本低、噪音小、柔性高、质量和转动惯量小、负载自重较高等优点,可有效对机器人驱动关节进行优化设计以及提高工作效率。
一种二自由度并联驱动仿人踝关节机构.pdf
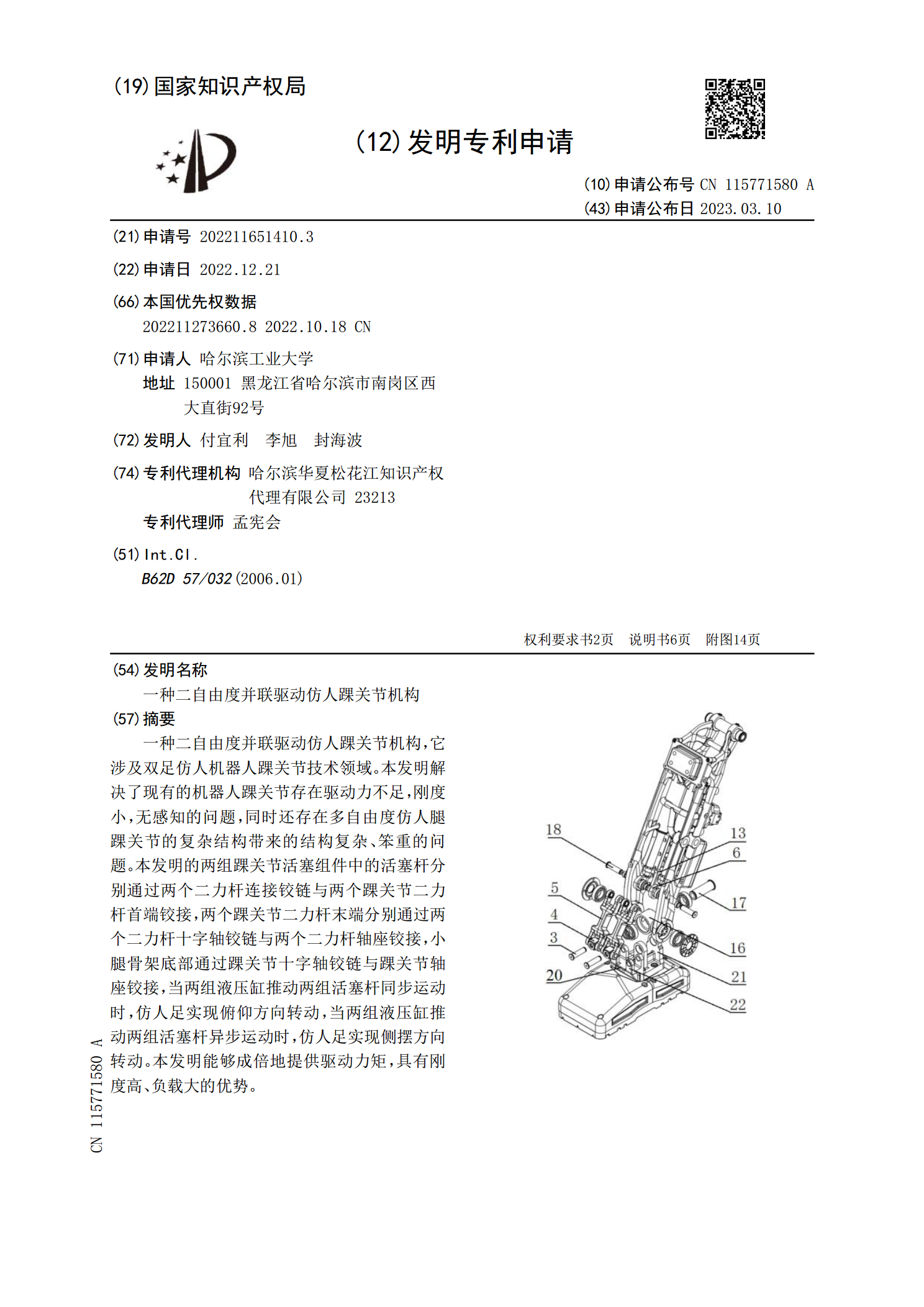
一种二自由度并联驱动仿人踝关节机构,它涉及双足仿人机器人踝关节技术领域。本发明解决了现有的机器人踝关节存在驱动力不足,刚度小,无感知的问题,同时还存在多自由度仿人腿踝关节的复杂结构带来的结构复杂、笨重的问题。本发明的两组踝关节活塞组件中的活塞杆分别通过两个二力杆连接铰链与两个踝关节二力杆首端铰接,两个踝关节二力杆末端分别通过两个二力杆十字轴铰链与两个二力杆轴座铰接,小腿骨架底部通过踝关节十字轴铰链与踝关节轴座铰接,当两组液压缸推动两组活塞杆同步运动时,仿人足实现俯仰方向转动,当两组液压缸推动两组活塞杆异步
一种绳驱动外骨骼机械臂的臂长调节机构.pdf
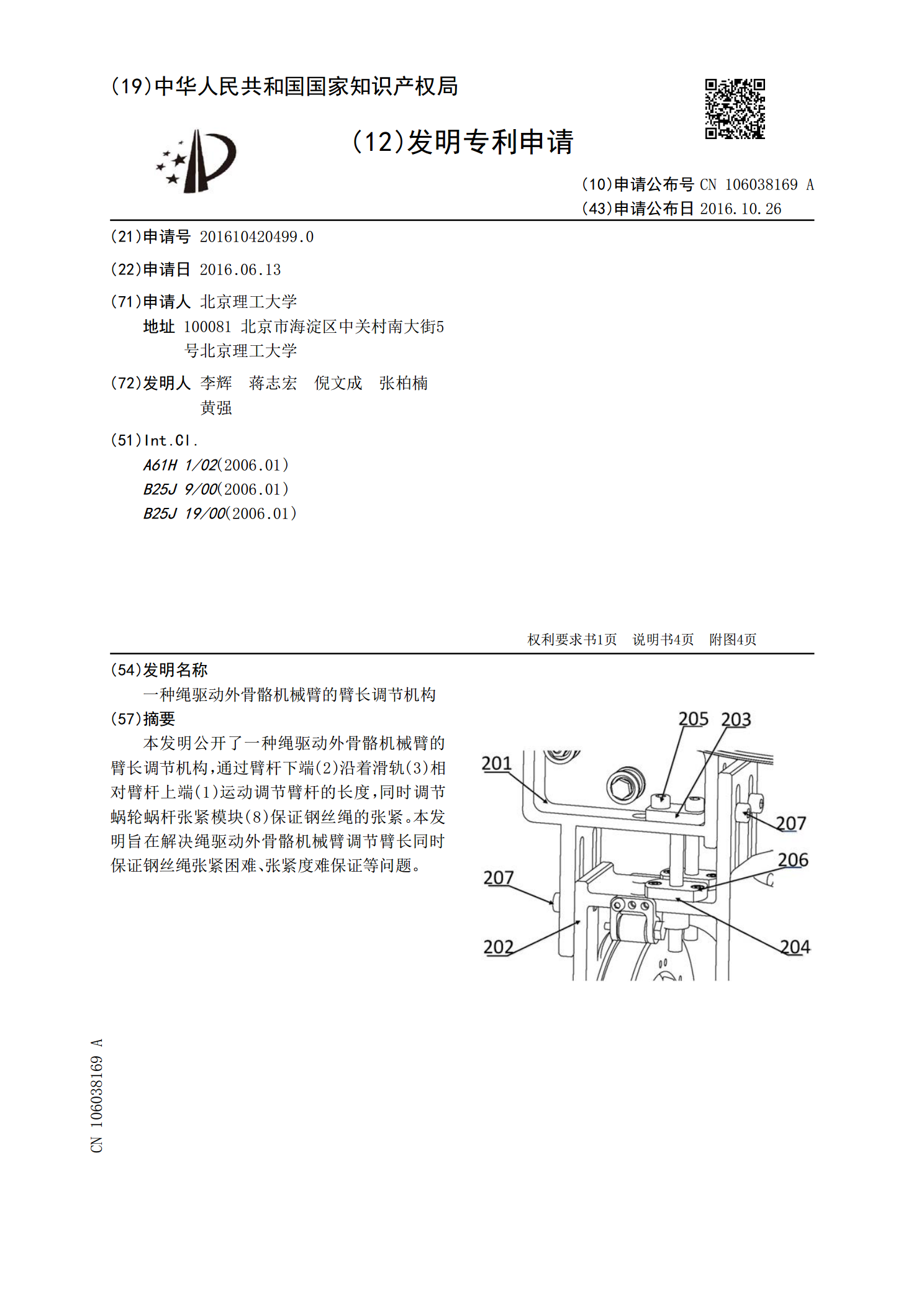
本发明公开了一种绳驱动外骨骼机械臂的臂长调节机构,通过臂杆下端(2)沿着滑轨(3)相对臂杆上端(1)运动调节臂杆的长度,同时调节蜗轮蜗杆张紧模块(8)保证钢丝绳的张紧。本发明旨在解决绳驱动外骨骼机械臂调节臂长同时保证钢丝绳张紧困难、张紧度难保证等问题。
一种多自由度机械臂的动力驱动机构.pdf
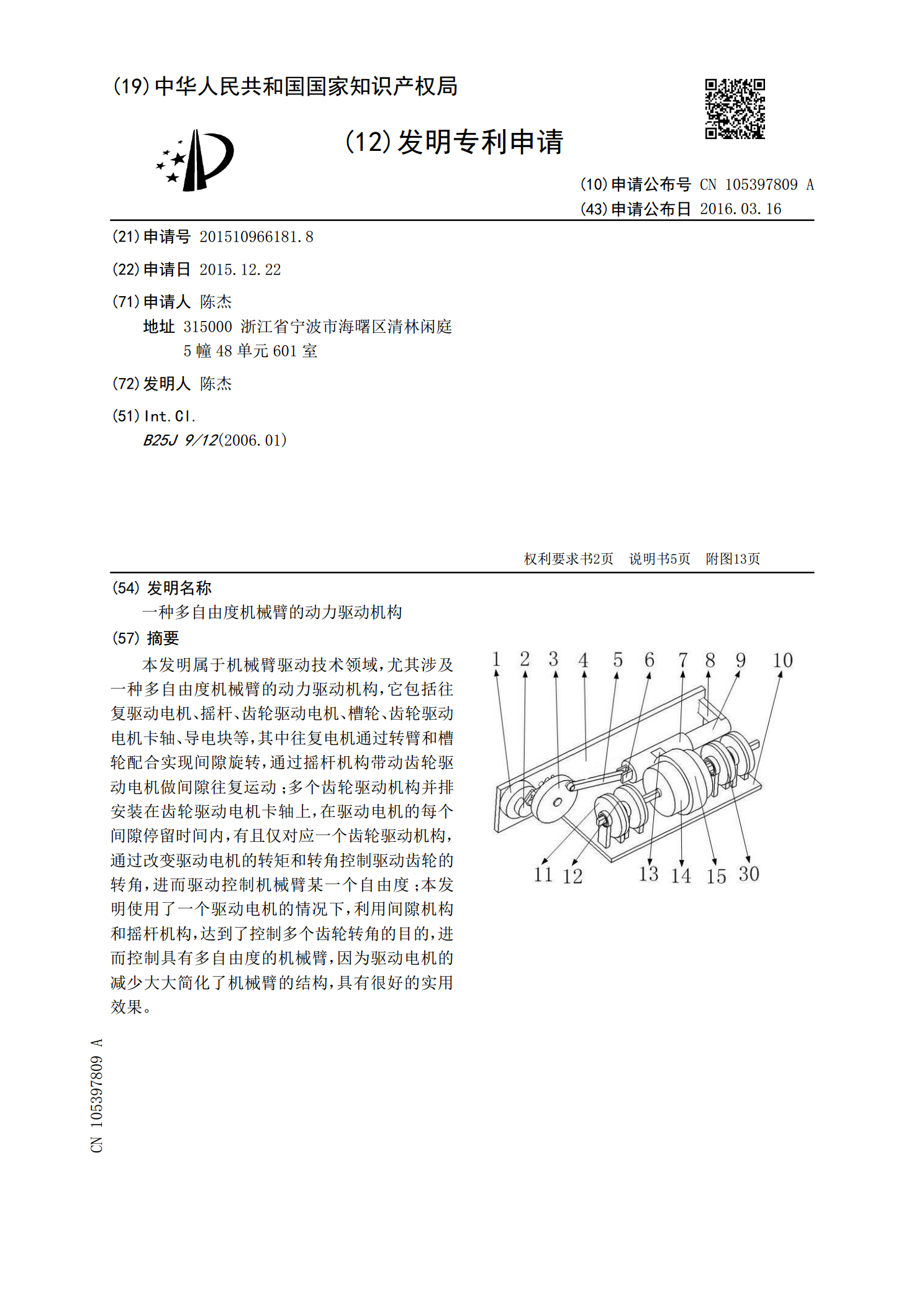
本发明属于机械臂驱动技术领域,尤其涉及一种多自由度机械臂的动力驱动机构,它包括往复驱动电机、摇杆、齿轮驱动电机、槽轮、齿轮驱动电机卡轴、导电块等,其中往复电机通过转臂和槽轮配合实现间隙旋转,通过摇杆机构带动齿轮驱动电机做间隙往复运动;多个齿轮驱动机构并排安装在齿轮驱动电机卡轴上,在驱动电机的每个间隙停留时间内,有且仅对应一个齿轮驱动机构,通过改变驱动电机的转矩和转角控制驱动齿轮的转角,进而驱动控制机械臂某一个自由度;本发明使用了一个驱动电机的情况下,利用间隙机构和摇杆机构,达到了控制多个齿轮转角的目的,进
一种二自由度绳牵引并联机构.pdf
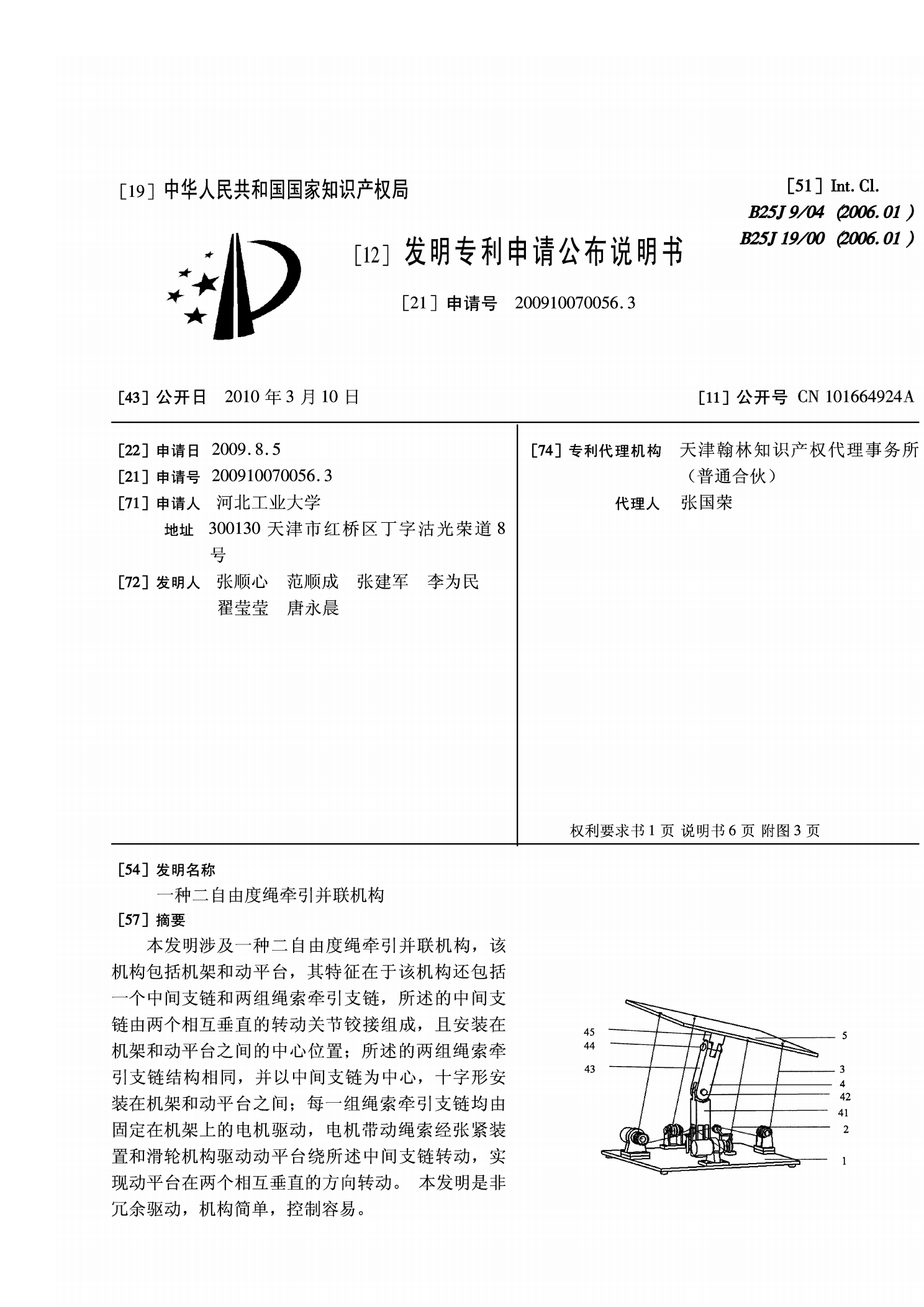
本发明涉及一种二自由度绳牵引并联机构,该机构包括机架和动平台,其特征在于该机构还包括一个中间支链和两组绳索牵引支链,所述的中间支链由两个相互垂直的转动关节铰接组成,且安装在机架和动平台之间的中心位置;所述的两组绳索牵引支链结构相同,并以中间支链为中心,十字形安装在机架和动平台之间;每一组绳索牵引支链均由固定在机架上的电机驱动,电机带动绳索经张紧装置和滑轮机构驱动动平台绕所述中间支链转动,实现动平台在两个相互垂直的方向转动。本发明是非冗余驱动,机构简单,控制容易。