
一种多自由度机械臂.pdf

宜欣****外呢


1/7

2/7
3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多自由度机械臂.pdf
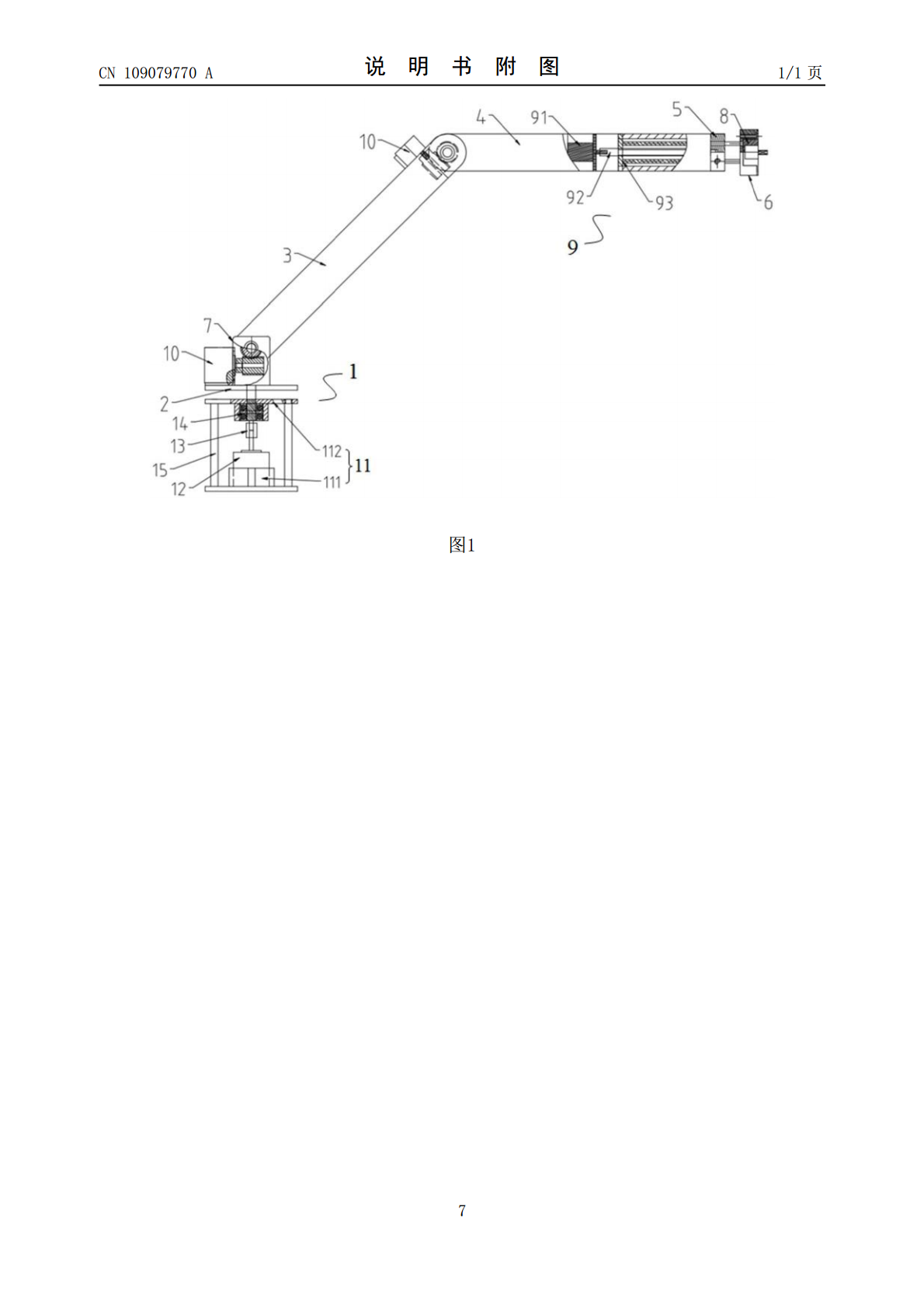
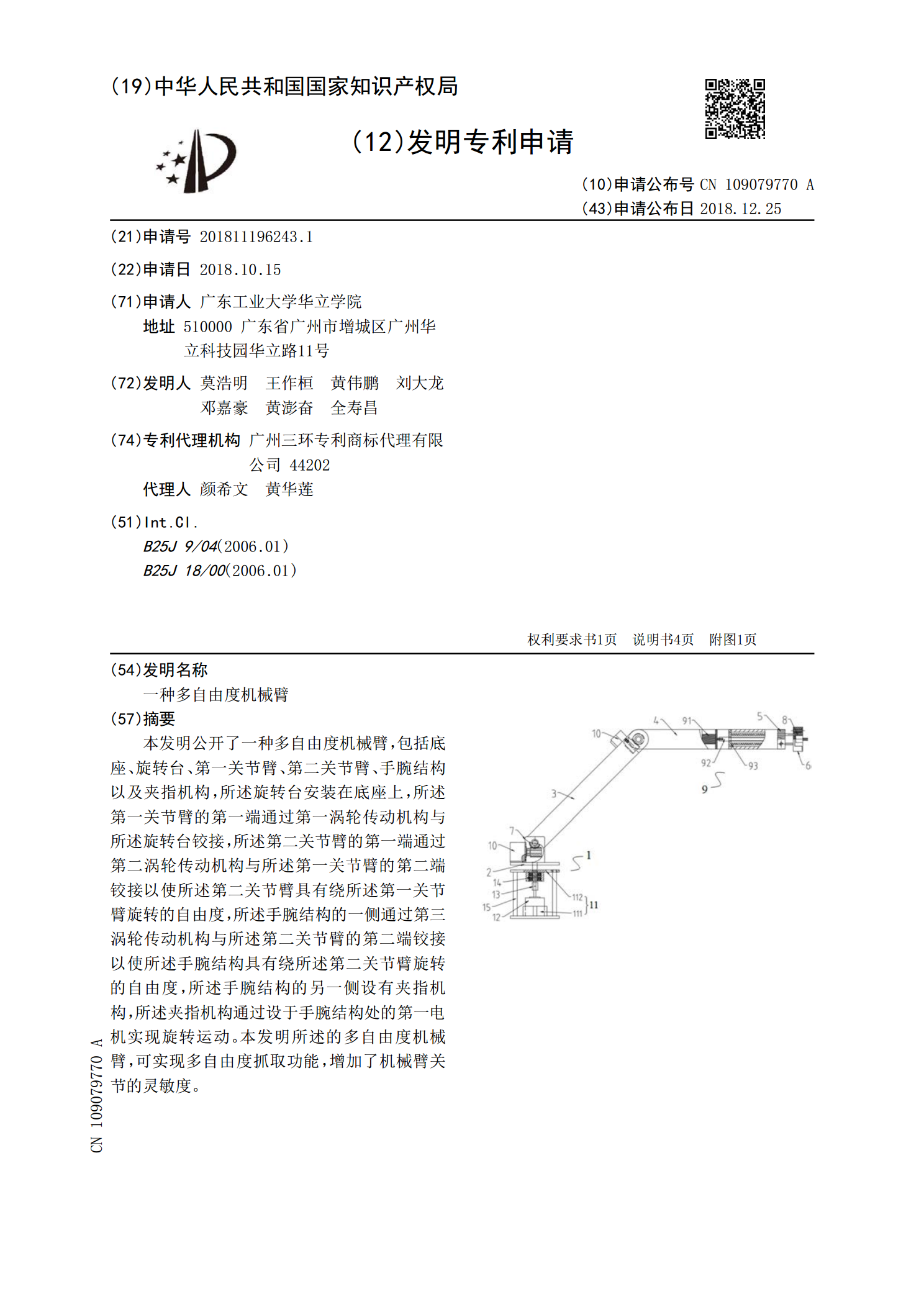
本发明公开了一种多自由度机械臂,包括底座、旋转台、第一关节臂、第二关节臂、手腕结构以及夹指机构,所述旋转台安装在底座上,所述第一关节臂的第一端通过第一涡轮传动机构与所述旋转台铰接,所述第二关节臂的第一端通过第二涡轮传动机构与所述第一关节臂的第二端铰接以使所述第二关节臂具有绕所述第一关节臂旋转的自由度,所述手腕结构的一侧通过第三涡轮传动机构与所述第二关节臂的第二端铰接以使所述手腕结构具有绕所述第二关节臂旋转的自由度,所述手腕结构的另一侧设有夹指机构,所述夹指机构通过设于手腕结构处的第一电机实现旋转运动。本发

一种多自由度工业机械臂.pdf
本发明属于自动控制技术领域,具体的说是一种多自由度工业机械臂;包括旋转支架、控制箱、旋转臂和抓取台;所述控制箱转动连接在旋转支架上;所述旋转臂转动连接在控制箱的输出端,且旋转臂上设有缓冲柱;所述抓取台转动连接在旋转臂的端部,抓取台包括转动架、固定台和摩擦单元;需要夹取箱体时,通过控制箱控制旋转支架和旋转臂的转动,使得机械臂能够实现多自由度的抓取,控制台可以通过控制齿轮的转动来调节抓取的高度,充分增强了机械臂的抓取功能,提高工业中产线的工作效率,增强机械臂的使用效果。
一种多自由度柔性机械臂.pdf
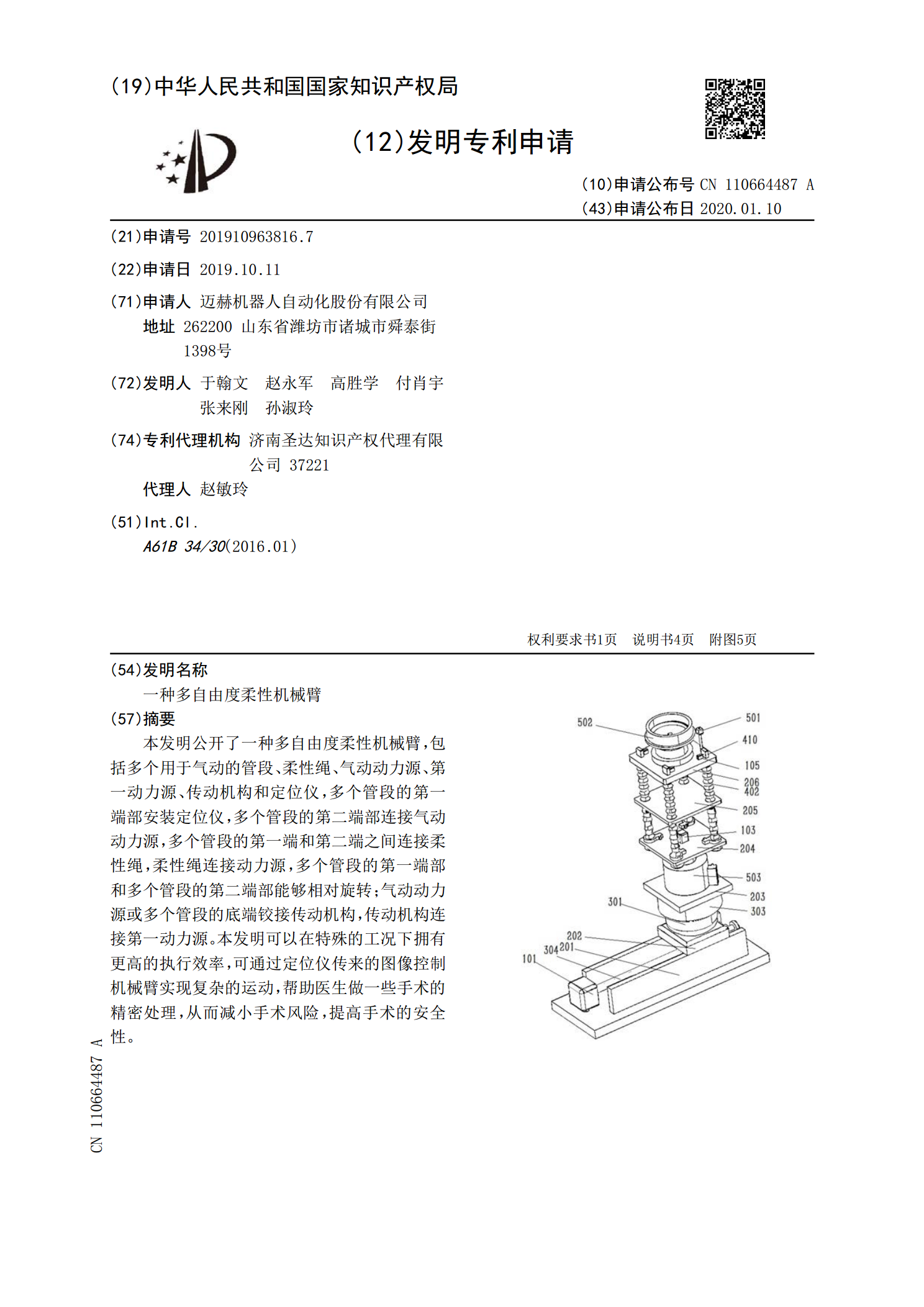
本发明公开了一种多自由度柔性机械臂,包括多个用于气动的管段、柔性绳、气动动力源、第一动力源、传动机构和定位仪,多个管段的第一端部安装定位仪,多个管段的第二端部连接气动动力源,多个管段的第一端和第二端之间连接柔性绳,柔性绳连接动力源,多个管段的第一端部和多个管段的第二端部能够相对旋转;气动动力源或多个管段的底端铰接传动机构,传动机构连接第一动力源。本发明可以在特殊的工况下拥有更高的执行效率,可通过定位仪传来的图像控制机械臂实现复杂的运动,帮助医生做一些手术的精密处理,从而减小手术风险,提高手术的安全性。

一种多自由度舞台机械臂.pdf
本发明涉及舞台机械臂技术领域,一种多自由度舞台机械臂,包括机械臂和机械臂上的连接架,所述连接架上通过减震部件还安装有调节盒,所述减震部件用于对连接架减震,所述调节盒上设置有收纳盒,所述连接架上还安装有限位块,所述限位块用于卡扣至收纳盒的内部,所述调节盒上安装有微调部件,所述微调部件用于辅助限位块插入收纳盒的内部,所述调节盒上还安装有支撑部件,所述支撑部件用于驱动微调部件,所述微调部件包括滑动连接在调节盒上的圆套。本发明通过圆套带动调节板旋转抵触在限位块上,从而扩大了调节板微调的范围,利用第二透气孔流通空气

一种双机械手的多自由度机械臂.pdf
本发明涉及一种双机械手的多自由度机械臂,属于多自由度机械臂技术领域。本发明包括两机械手、主臂、主电机、主电机锥齿轮、转轴锥齿轮、转轴;所述两机械手分别通过旋转架与主臂连接,主臂通过转轴与转轴锥齿轮配合,转轴锥齿轮与主电机锥齿轮啮合且主电机锥齿轮安装于主电机轴上;整个机械臂利用各电动机作为原动件,通过齿轮机构、曲柄连杆机构等实现机械臂的俯仰、旋转等动作,机械手通过齿轮、丝杆等机构实现旋转、张合等动作,能够有效完成抓取物品的工作。