
磁吸附爬壁机器人平台的设计及其相关问题研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

磁吸附爬壁机器人平台的设计及其相关问题研究的中期报告.docx
磁吸附爬壁机器人平台的设计及其相关问题研究的中期报告一、研究背景磁吸附爬壁机器人是一种能够在墙面、天花板等各种垂直面上自由行走的机器人。它在建筑物、石油、化工等领域有着非常广泛的应用。目前的磁吸附爬壁机器人主要是基于永磁体和电磁体等技术来实现磁吸附的能力。与其他类型的机器人相比,磁吸附爬壁机器人具有较强的适应性和灵活性,可以在狭小的空间中进行作业,且操作人员不会被机器人本身的重量压缩。本文研究的磁吸附爬壁机器人平台是一种新型的机器人平台。它采用永磁体磁吸附技术,并具有一定的智能化功能。其通过控制板、传感器
磁吸附爬壁机器人.pdf
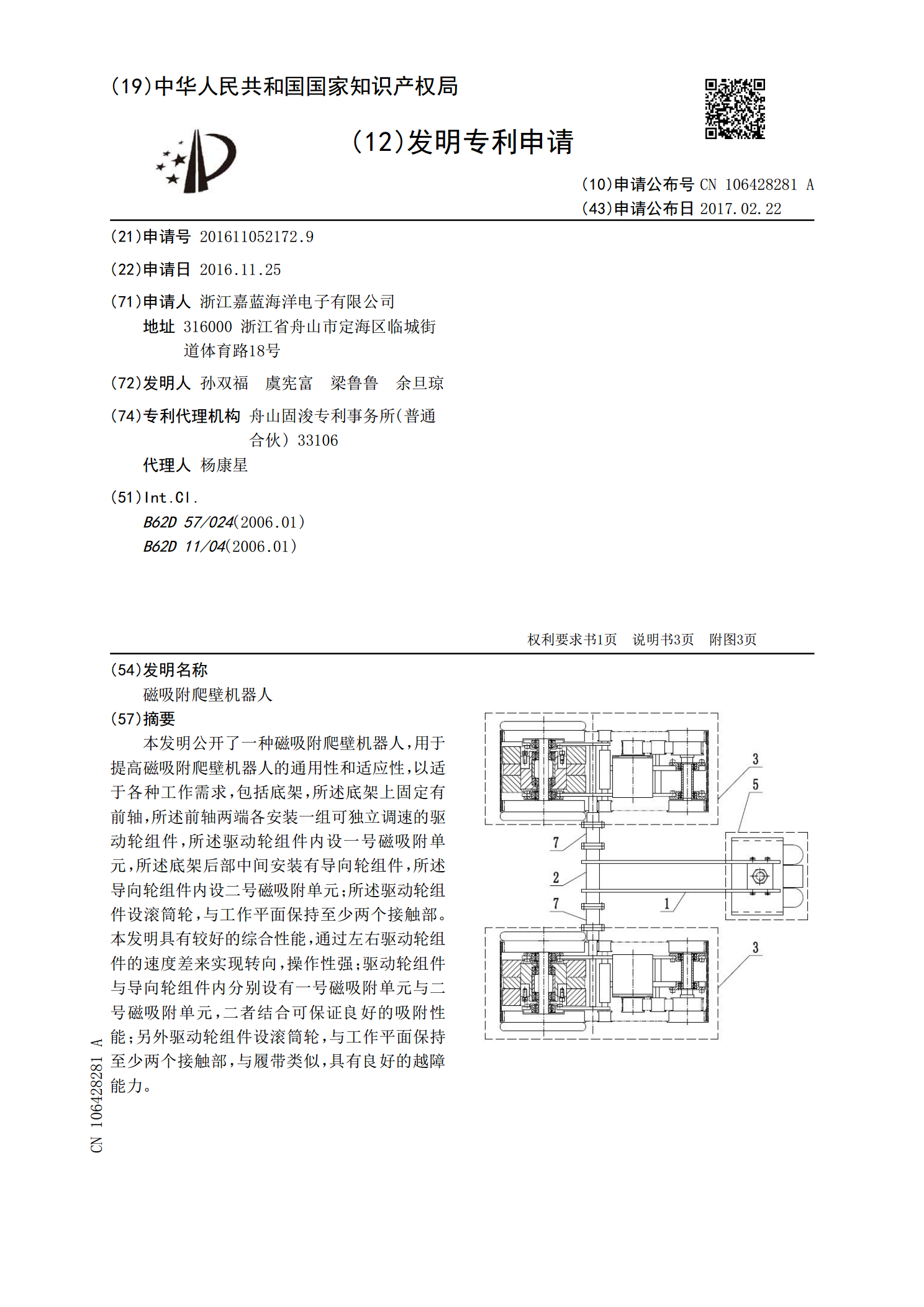
本发明公开了一种磁吸附爬壁机器人,用于提高磁吸附爬壁机器人的通用性和适应性,以适于各种工作需求,包括底架,所述底架上固定有前轴,所述前轴两端各安装一组可独立调速的驱动轮组件,所述驱动轮组件内设一号磁吸附单元,所述底架后部中间安装有导向轮组件,所述导向轮组件内设二号磁吸附单元;所述驱动轮组件设滚筒轮,与工作平面保持至少两个接触部。本发明具有较好的综合性能,通过左右驱动轮组件的速度差来实现转向,操作性强;驱动轮组件与导向轮组件内分别设有一号磁吸附单元与二号磁吸附单元,二者结合可保证良好的吸附性能;另外驱动轮组
磁吸附履带爬壁机器人.pdf
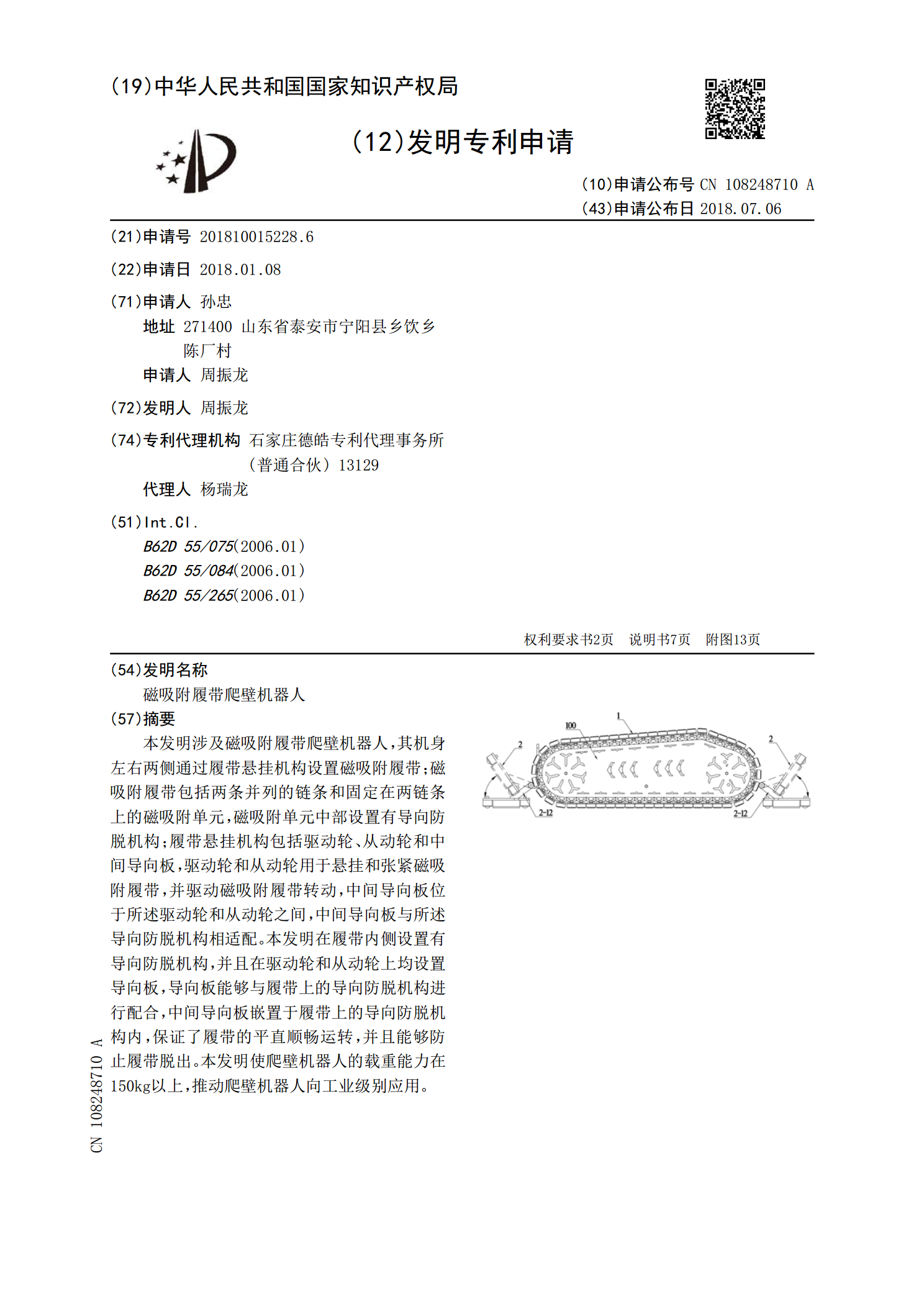
本发明涉及磁吸附履带爬壁机器人,其机身左右两侧通过履带悬挂机构设置磁吸附履带;磁吸附履带包括两条并列的链条和固定在两链条上的磁吸附单元,磁吸附单元中部设置有导向防脱机构;履带悬挂机构包括驱动轮、从动轮和中间导向板,驱动轮和从动轮用于悬挂和张紧磁吸附履带,并驱动磁吸附履带转动,中间导向板位于所述驱动轮和从动轮之间,中间导向板与所述导向防脱机构相适配。本发明在履带内侧设置有导向防脱机构,并且在驱动轮和从动轮上均设置导向板,导向板能够与履带上的导向防脱机构进行配合,中间导向板嵌置于履带上的导向防脱机构内,保证了

磁粉探伤爬壁检测机器人的设计与研究的中期报告.docx
磁粉探伤爬壁检测机器人的设计与研究的中期报告一、课题研究背景和意义随着科学技术的不断发展和对工业设备运行安全性能的要求不断提高,对于各种自动化机器人技术的应用不断扩展,并且在其中尤以磁粉探伤技术的应用居多,因为它已经成为了一种非常有效的材料无损探测方法,在航空、石油、化工等领域都有广泛的应用。尤其是在各类管道和储罐的内磁探工作中,无需拆卸设备,即可进行对它们的检测工作,从而能很好地预防可能的事故和灾难。但是,传统的人工磁探工作也会受到许多限制,如设备结构复杂、易受环境影响等等的问题,这时就需要一种可以自动
基于磁吸附原理的小型轮式爬壁机器人平台.pdf
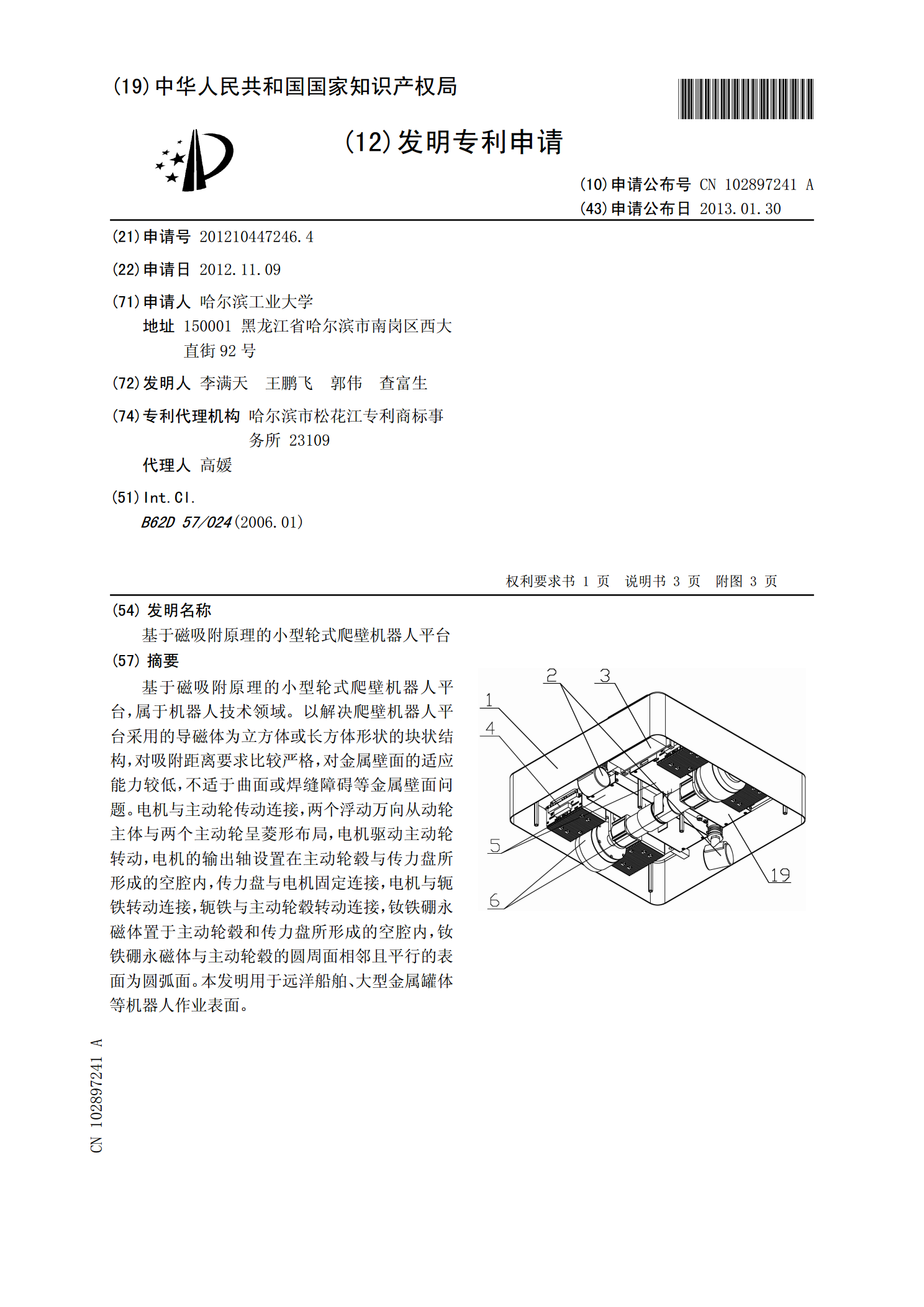
基于磁吸附原理的小型轮式爬壁机器人平台,属于机器人技术领域。以解决爬壁机器人平台采用的导磁体为立方体或长方体形状的块状结构,对吸附距离要求比较严格,对金属壁面的适应能力较低,不适于曲面或焊缝障碍等金属壁面问题。电机与主动轮传动连接,两个浮动万向从动轮主体与两个主动轮呈菱形布局,电机驱动主动轮转动,电机的输出轴设置在主动轮毂与传力盘所形成的空腔内,传力盘与电机固定连接,电机与轭铁转动连接,轭铁与主动轮毂转动连接,钕铁硼永磁体置于主动轮毂和传力盘所形成的空腔内,钕铁硼永磁体与主动轮毂的圆周面相邻且平行的表面为