
基于磁吸附原理的小型轮式爬壁机器人平台.pdf

猫巷****觅蓉


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于磁吸附原理的小型轮式爬壁机器人平台.pdf
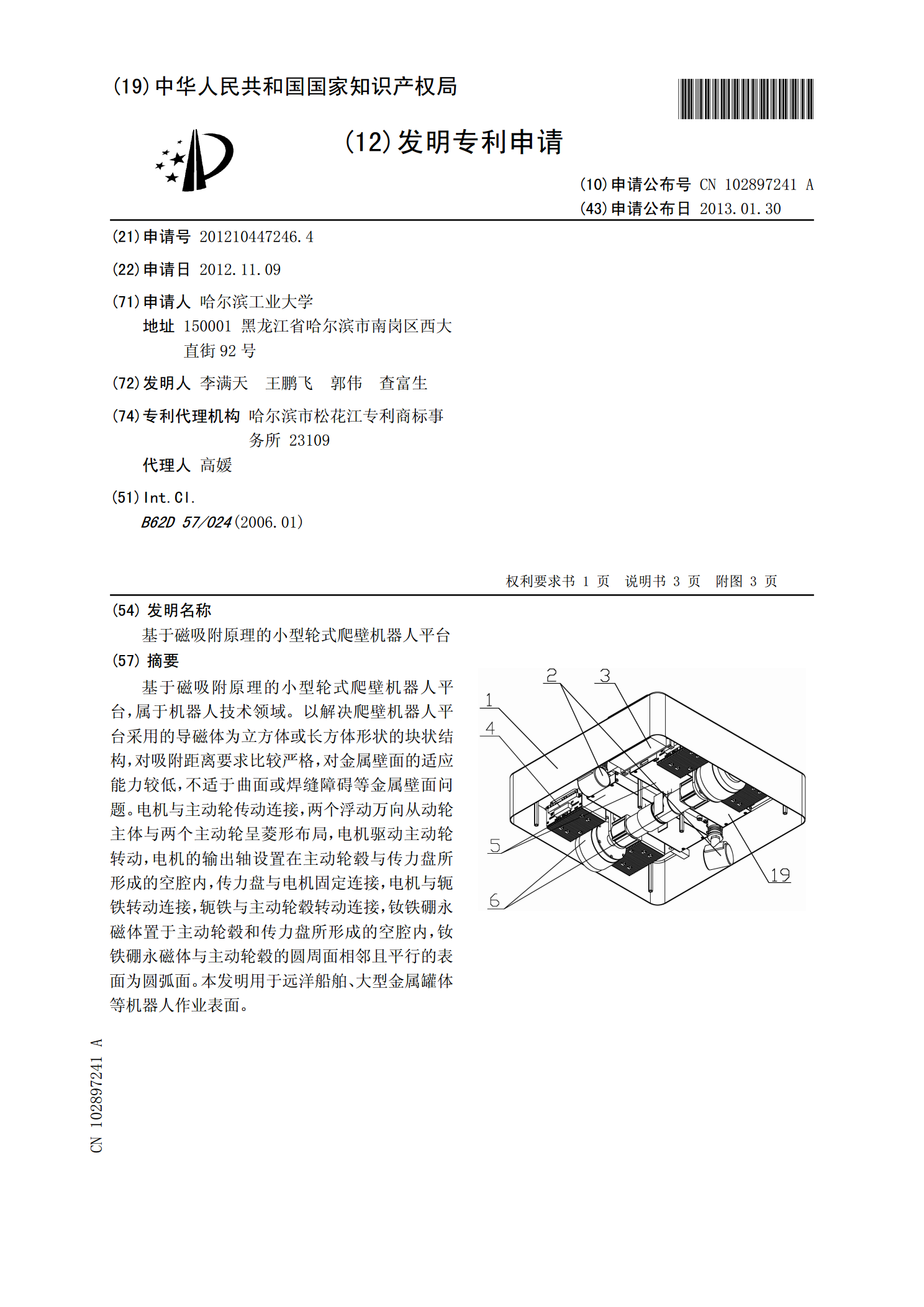
基于磁吸附原理的小型轮式爬壁机器人平台,属于机器人技术领域。以解决爬壁机器人平台采用的导磁体为立方体或长方体形状的块状结构,对吸附距离要求比较严格,对金属壁面的适应能力较低,不适于曲面或焊缝障碍等金属壁面问题。电机与主动轮传动连接,两个浮动万向从动轮主体与两个主动轮呈菱形布局,电机驱动主动轮转动,电机的输出轴设置在主动轮毂与传力盘所形成的空腔内,传力盘与电机固定连接,电机与轭铁转动连接,轭铁与主动轮毂转动连接,钕铁硼永磁体置于主动轮毂和传力盘所形成的空腔内,钕铁硼永磁体与主动轮毂的圆周面相邻且平行的表面为

一种轮式磁吸附爬壁机器人.pdf
本发明公开了一种轮式磁吸附爬壁机器人,属于机器人技术领域。其包括车体、车轮模块及吸附模块;车体包括车架及车轮搭载平台,车轮搭载平台包括自适应车轮搭载平台及固定式车轮搭载平台,固定式车轮搭载平台与所述车架连接,自适应车轮搭载平台通过转动机构与车架连接;转动机构包括转轴、转轴支撑架及扭簧;车轮模块包括车轮、RV减速机及步进电机;吸附模块包括多个用于将机器人吸附到作业圆柱壁面的吸附磁条。本发明采用永磁吸附形式与四轮四驱传动结构,结构简单,机器人能够自适应贴合不同曲率半径的导磁壁面,极大的提高了工作效率,保证爬壁
一种轮式磁吸附爬壁机器人.pdf
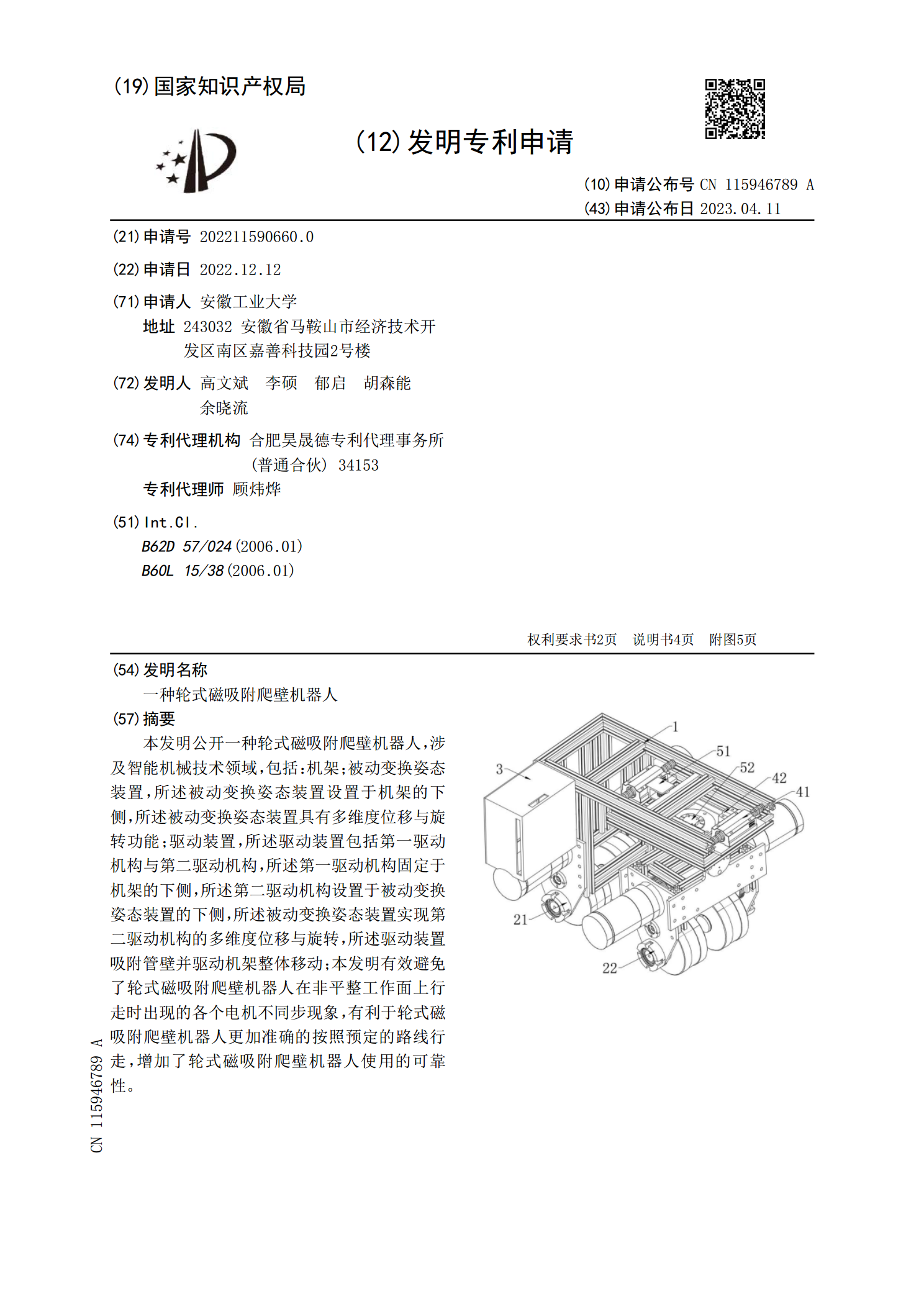
本发明公开一种轮式磁吸附爬壁机器人,涉及智能机械技术领域,包括:机架;被动变换姿态装置,所述被动变换姿态装置设置于机架的下侧,所述被动变换姿态装置具有多维度位移与旋转功能;驱动装置,所述驱动装置包括第一驱动机构与第二驱动机构,所述第一驱动机构固定于机架的下侧,所述第二驱动机构设置于被动变换姿态装置的下侧,所述被动变换姿态装置实现第二驱动机构的多维度位移与旋转,所述驱动装置吸附管壁并驱动机架整体移动;本发明有效避免了轮式磁吸附爬壁机器人在非平整工作面上行走时出现的各个电机不同步现象,有利于轮式磁吸附爬壁机器

具有曲面自适应吸附的磁轮式爬壁机器人.pdf
本发明公开了一种具有曲面自适应吸附的磁轮式爬壁机器人,它包括具有曲面自适应吸附的移动平台、加速度传感器、无线通讯模块、摄像头和上位机;曲面自适应吸附的移动平台由磁性驱动轮单元和曲面自适应车架组成,通过磁性驱动轮中弹性永磁吸附层和车架中活页铰链的共同变形,实现曲面自适应吸附;本发明的磁轮式爬壁机器人具有良好的曲面自适应能力和越障能力,能够在曲率半径较小的曲面上稳定行走,可满足大跨度空间网格结构的无线健康检测等工程应用需求。
一种轮式磁吸附爬壁机器人的转向装置.pdf
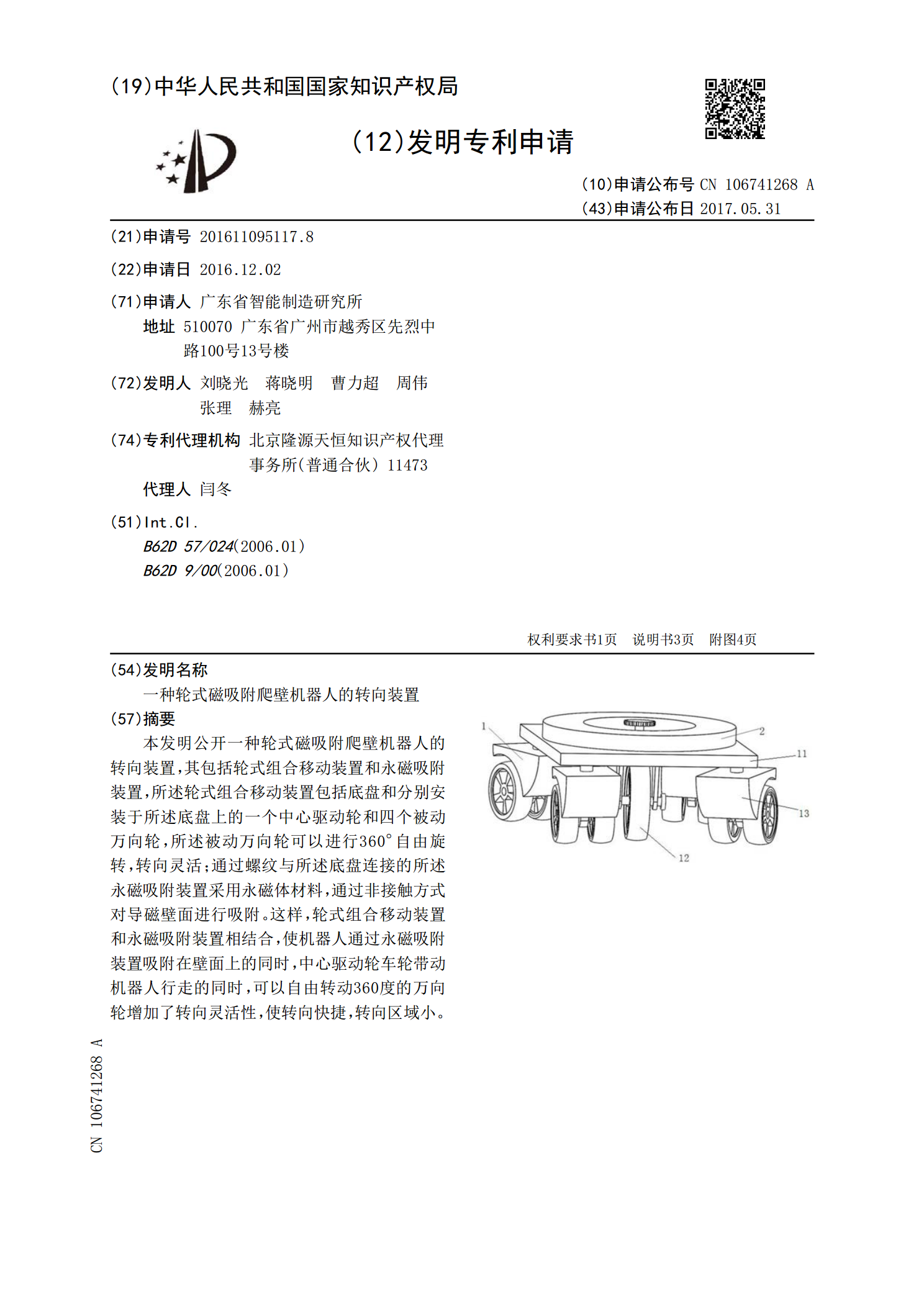
本发明公开一种轮式磁吸附爬壁机器人的转向装置,其包括轮式组合移动装置和永磁吸附装置,所述轮式组合移动装置包括底盘和分别安装于所述底盘上的一个中心驱动轮和四个被动万向轮,所述被动万向轮可以进行360°自由旋转,转向灵活;通过螺纹与所述底盘连接的所述永磁吸附装置采用永磁体材料,通过非接触方式对导磁壁面进行吸附。这样,轮式组合移动装置和永磁吸附装置相结合,使机器人通过永磁吸附装置吸附在壁面上的同时,中心驱动轮车轮带动机器人行走的同时,可以自由转动360度的万向轮增加了转向灵活性,使转向快捷,转向区域小。