
斗轮机自动取料方法.pdf

睿德****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

斗轮机自动取料方法.pdf
本发明提供了一种斗轮机自动取料方法,包括以下步骤:获取斗轮自转圆周底部和取料层底平面相切时,斗轮自转圆周与料堆斜面切点高度处的料堆轮廓的等高线;在斗轮自转圆周底部和取料层底平面相切的情况下,依据斗轮绕悬臂回转中心的水平回旋轨迹与等高线的切点及斗轮最大挖掘深度,来确定斗轮切入点的坐标;反推出取料机行走位移、悬臂回旋角度和悬臂俯仰角度,从而控制取料机自动取料。通过本发明,结合料堆三维轮廓数据,依据取料切入点反推出取料机的动作参数,实现斗轮机取料无人化控制,可以避免取料机空扫和闷斗,在不损坏斗轮的前提下最大限度

可自动堆取料的门式斗轮机设备及自动堆取料方法.pdf
本发明公开了可自动堆取料的门式斗轮机设备,包括斗轮大车、活动梁、斗轮小车、堆取料皮带机、取料皮带机、移动皮带机、C‑7皮带机、尾车、激光盘煤仪、雷达料位计、定位发射器、定位接收器,本发明实现了自动的堆料和取料,提高了堆料和取料的效率。本发明还公开了门式斗轮机设备的自动堆取料方法,包括自动堆料方法和自动取料方法,自动堆料方法为斗轮大车、移动皮带机按照设定从起始位置至结束位置反复循环作业堆料,自动取料方法为斗轮大车和斗轮小车照设定从起始位置至结束位置反复循环作业取料,本发明堆取料精准,无需人工目测操作,各机构
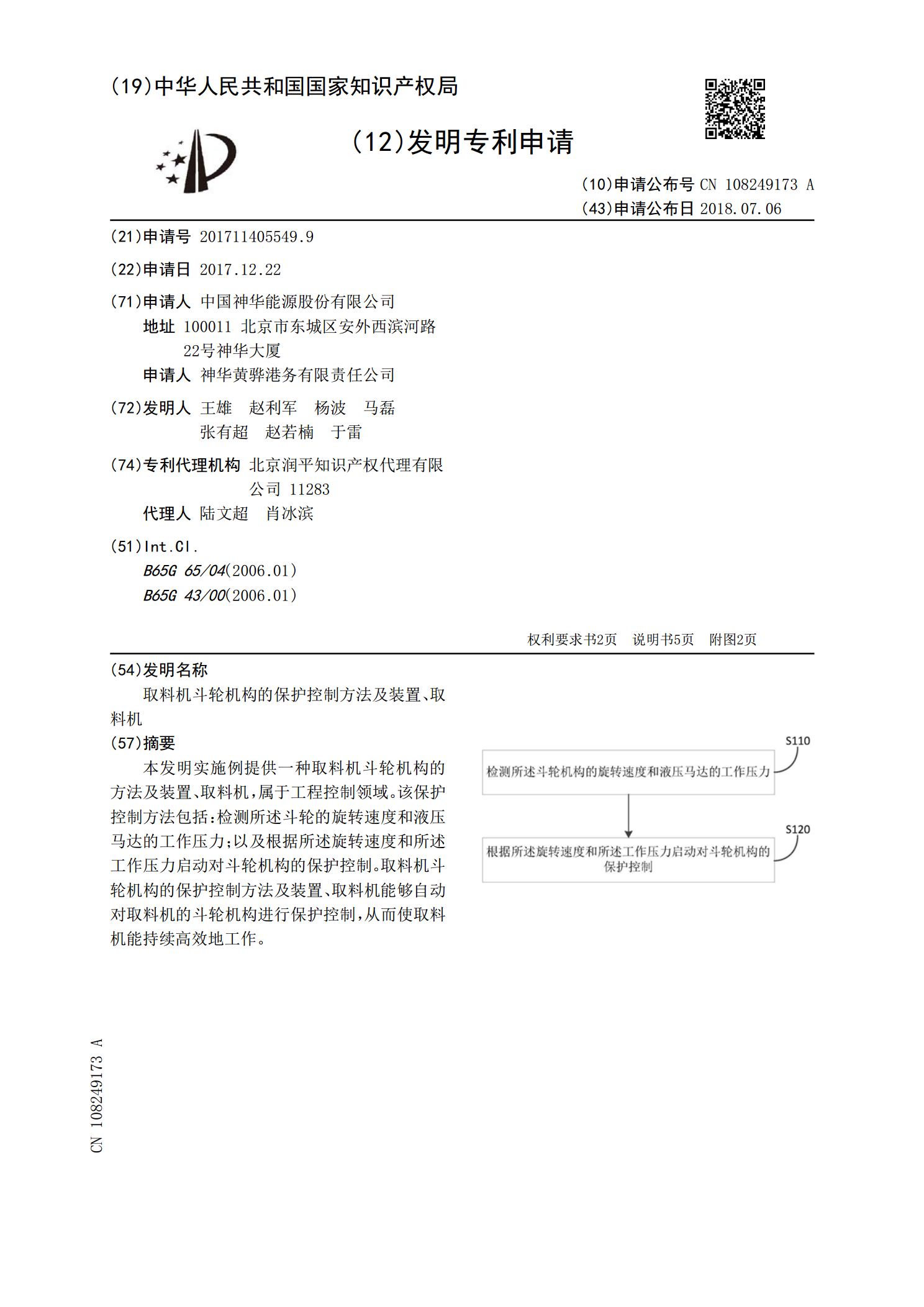
取料机斗轮机构的保护控制方法及装置、取料机.pdf
本发明实施例提供一种取料机斗轮机构的方法及装置、取料机,属于工程控制领域。该保护控制方法包括:检测所述斗轮的旋转速度和液压马达的工作压力;以及根据所述旋转速度和所述工作压力启动对斗轮机构的保护控制。取料机斗轮机构的保护控制方法及装置、取料机能够自动对取料机的斗轮机构进行保护控制,从而使取料机能持续高效地工作。
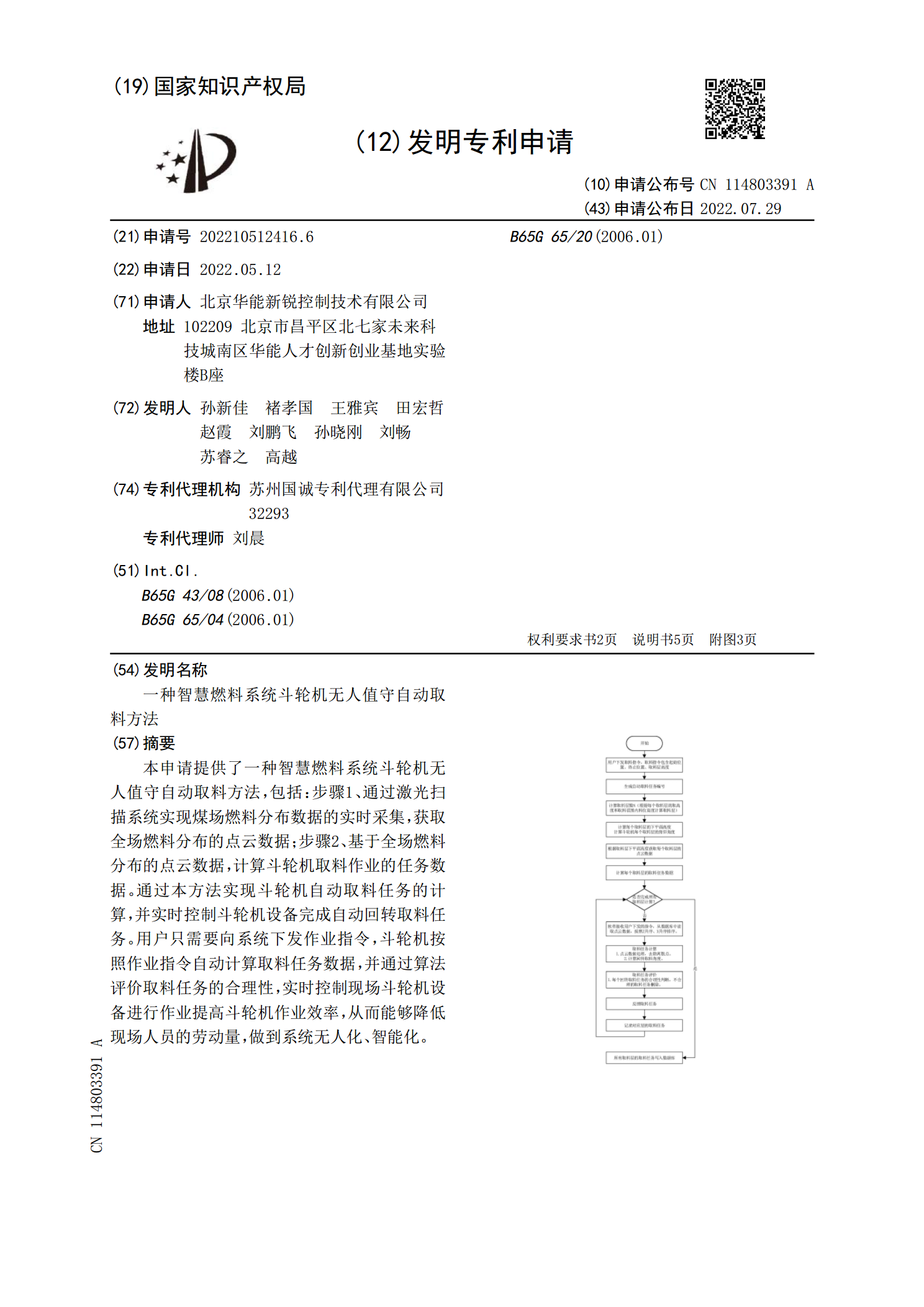
一种智慧燃料系统斗轮机无人值守自动取料方法.pdf
本申请提供了一种智慧燃料系统斗轮机无人值守自动取料方法,包括:步骤1、通过激光扫描系统实现煤场燃料分布数据的实时采集,获取全场燃料分布的点云数据;步骤2、基于全场燃料分布的点云数据,计算斗轮机取料作业的任务数据。通过本方法实现斗轮机自动取料任务的计算,并实时控制斗轮机设备完成自动回转取料任务。用户只需要向系统下发作业指令,斗轮机按照作业指令自动计算取料任务数据,并通过算法评价取料任务的合理性,实时控制现场斗轮机设备进行作业提高斗轮机作业效率,从而能够降低现场人员的劳动量,做到系统无人化、智能化。

堆取料机培训——斗轮机.ppt
斗轮机工作原理堆料作业取料作业斗轮机主要部件结构特征斗轮机主要部件结构特征斗轮机主要部件结构特征斗轮机主要部件结构特征斗轮机主要部件结构特征斗轮机主要部件结构特征斗轮机主要部件结构特征斗轮机主要部件结构特征斗轮机主要部件结构特征斗轮机主要部件结构特征斗轮机操作斗轮机操作斗轮机操作斗轮机操作斗轮机保护装置安全注意事项安全注意事项感谢您的关注