
并联五连杆点足式双足机器人稳定行走控制方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

并联五连杆点足式双足机器人稳定行走控制方法.docx
并联五连杆点足式双足机器人稳定行走控制方法并联五连杆点足式双足机器人稳定行走控制方法摘要:随着机器人技术的不断发展,双足机器人作为一种重要的机器人形态,具有广泛的应用前景。然而,双足机器人的稳定行走仍然是一个具有挑战的问题。本文提出了一种并联五连杆点足式的双足机器人稳定行走控制方法。该方法通过对双足机器人的运动进行建模,并利用控制算法实现稳定的行走。通过实验验证,该方法能够实现双足机器人的稳定行走,具有较好的鲁棒性和稳定性。关键词:双足机器人;并联五连杆;点足式;稳定行走;控制方法1.引言双足机器人作为仿

双足行走机器人稳定性控制方法.doc
双足行走机器人稳定性控制方法双足行走机器人稳定性控制方法大连理工大学工程力学系李增刚1引言人作为双足行走生物,是在长期的生物进化过程中形成的。人能够不自觉地保持身体的直立性和平衡性,不论是在静止不动还是在行走过程中。一旦失去平衡,人就会产生相应的动作,使身体保持平衡。例如,在静止时,当人的重心偏向一侧时,就会不自觉地向该侧跨出一脚,以使重心位置落于支撑面内。这里,支撑面定义为两脚之间的面积以及两脚的面积。当重心落于支撑面内时,就不会倾倒。再如,在行走过程中,人的重心不断向前移动,超出了两脚尖的位置,迫使人
双足行走推餐车式机器人.pdf
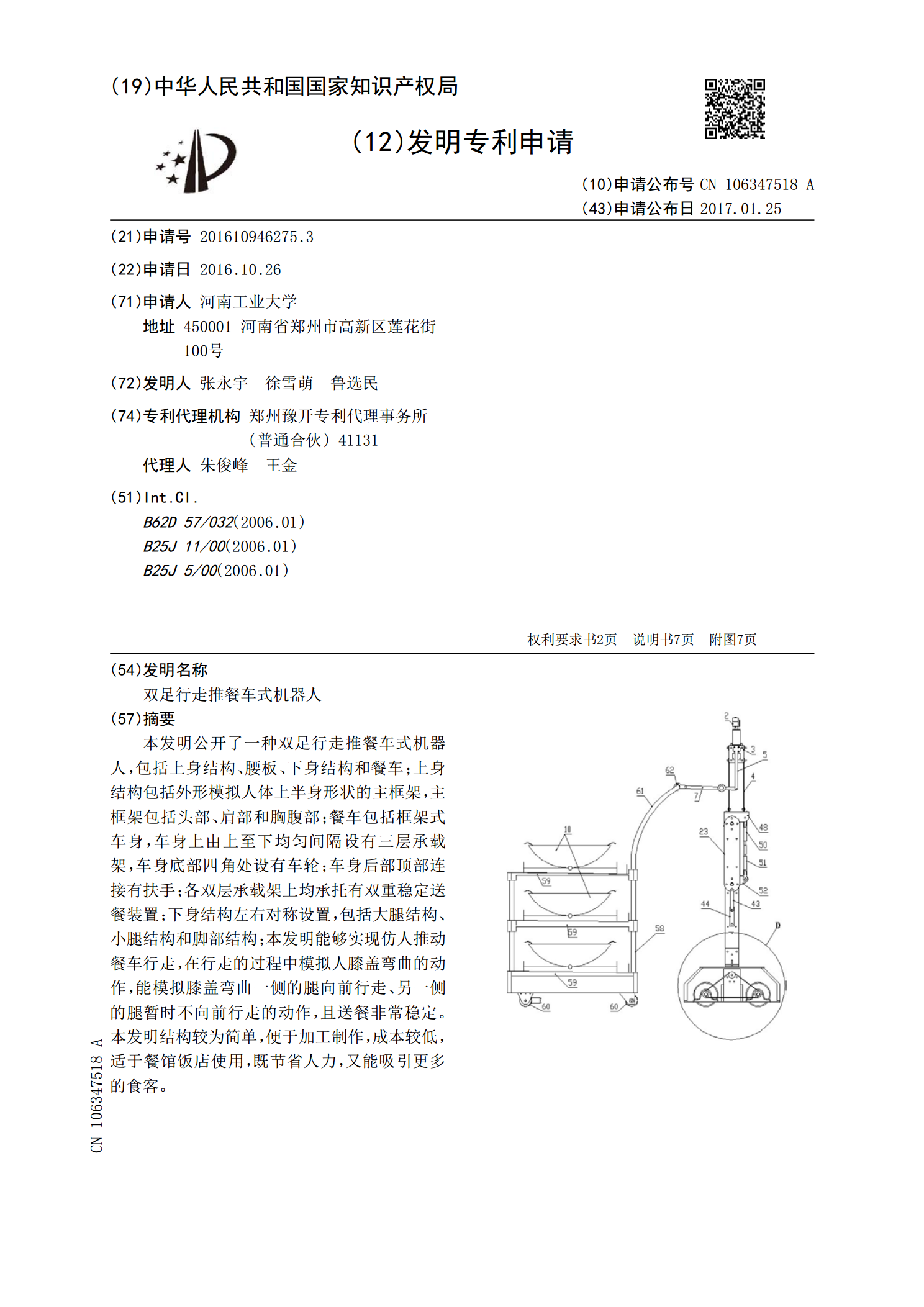
本发明公开了一种双足行走推餐车式机器人,包括上身结构、腰板、下身结构和餐车;上身结构包括外形模拟人体上半身形状的主框架,主框架包括头部、肩部和胸腹部;餐车包括框架式车身,车身上由上至下均匀间隔设有三层承载架,车身底部四角处设有车轮;车身后部顶部连接有扶手;各双层承载架上均承托有双重稳定送餐装置;下身结构左右对称设置,包括大腿结构、小腿结构和脚部结构;本发明能够实现仿人推动餐车行走,在行走的过程中模拟人膝盖弯曲的动作,能模拟膝盖弯曲一侧的腿向前行走、另一侧的腿暂时不向前行走的动作,且送餐非常稳定。本发明结构

双足机器人行走稳定性控制方法与实验研究的中期报告.docx
双足机器人行走稳定性控制方法与实验研究的中期报告本中期报告旨在探讨双足机器人行走稳定性控制方法及其实验研究进展。具体内容如下:一、研究背景和意义随着机器人技术的不断发展,双足机器人作为一种重要的机器人类型,被广泛应用于服务机器人、教育机器人、紧急救援机器人等领域。双足机器人具有人形化、灵活性强、环境适应性好等特点,但同时也面临着行走稳定性不足、能耗较高等问题。因此,研究双足机器人的行走稳定性控制方法具有重要的理论和应用价值。二、研究现状目前,国内外学者在双足机器人行走稳定性控制方面取得了一些进展。常见的控

双足行走机器人平衡控制译文.docx
外文资料:Robots1.IntroductionNowadays,theapplicationsofmachinesandrobotstoassisthumaninperformingtheirtaskshasbecomeincreasinglyextensive.Inindustrialapplications,theuseofroboticssystemhasreachedthelevelwhichsurpasseshumanabilityintermsofspeedandaccuracy.Onth