
双足行走推餐车式机器人.pdf

羽沫****魔王

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
双足行走推餐车式机器人.pdf
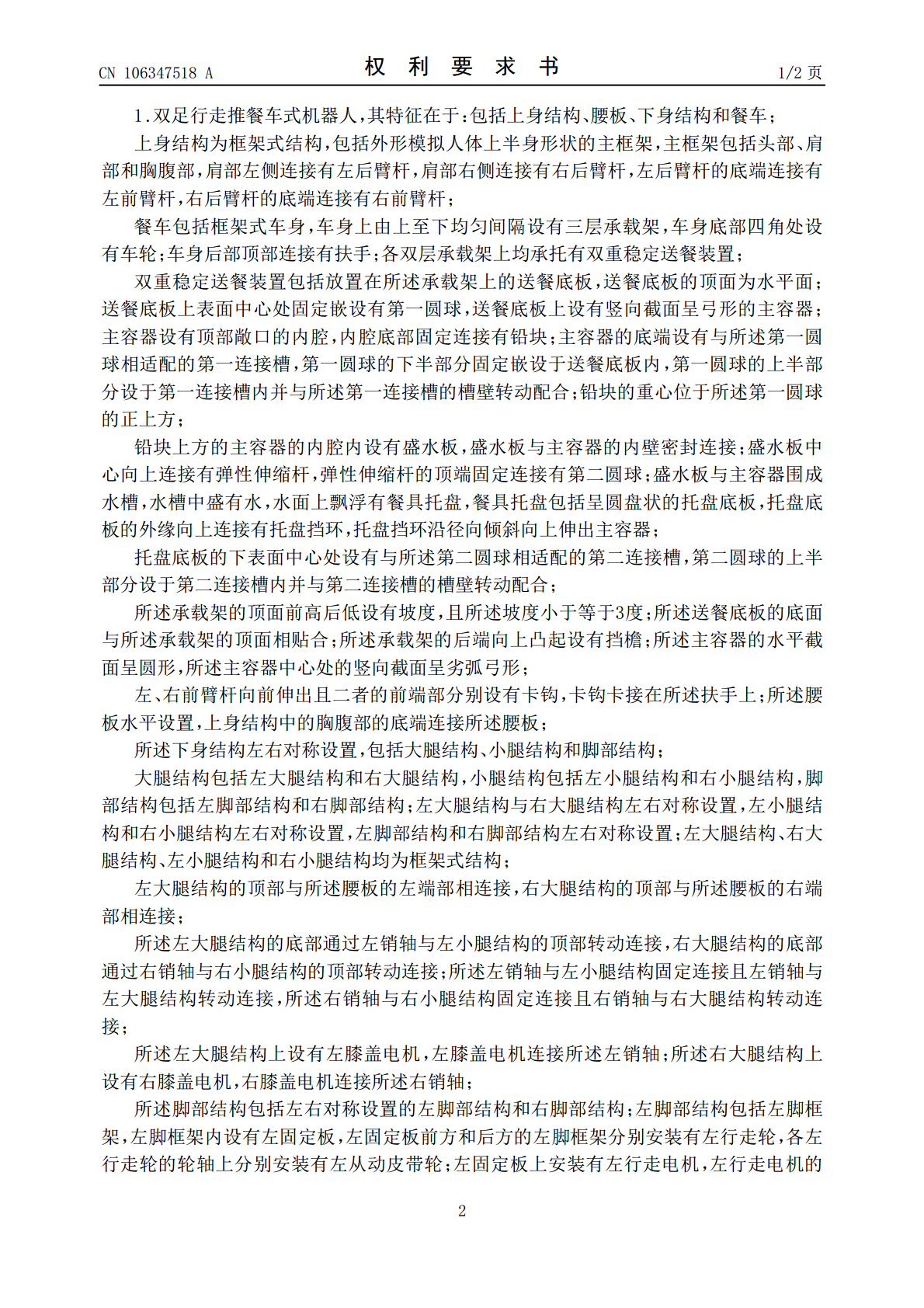
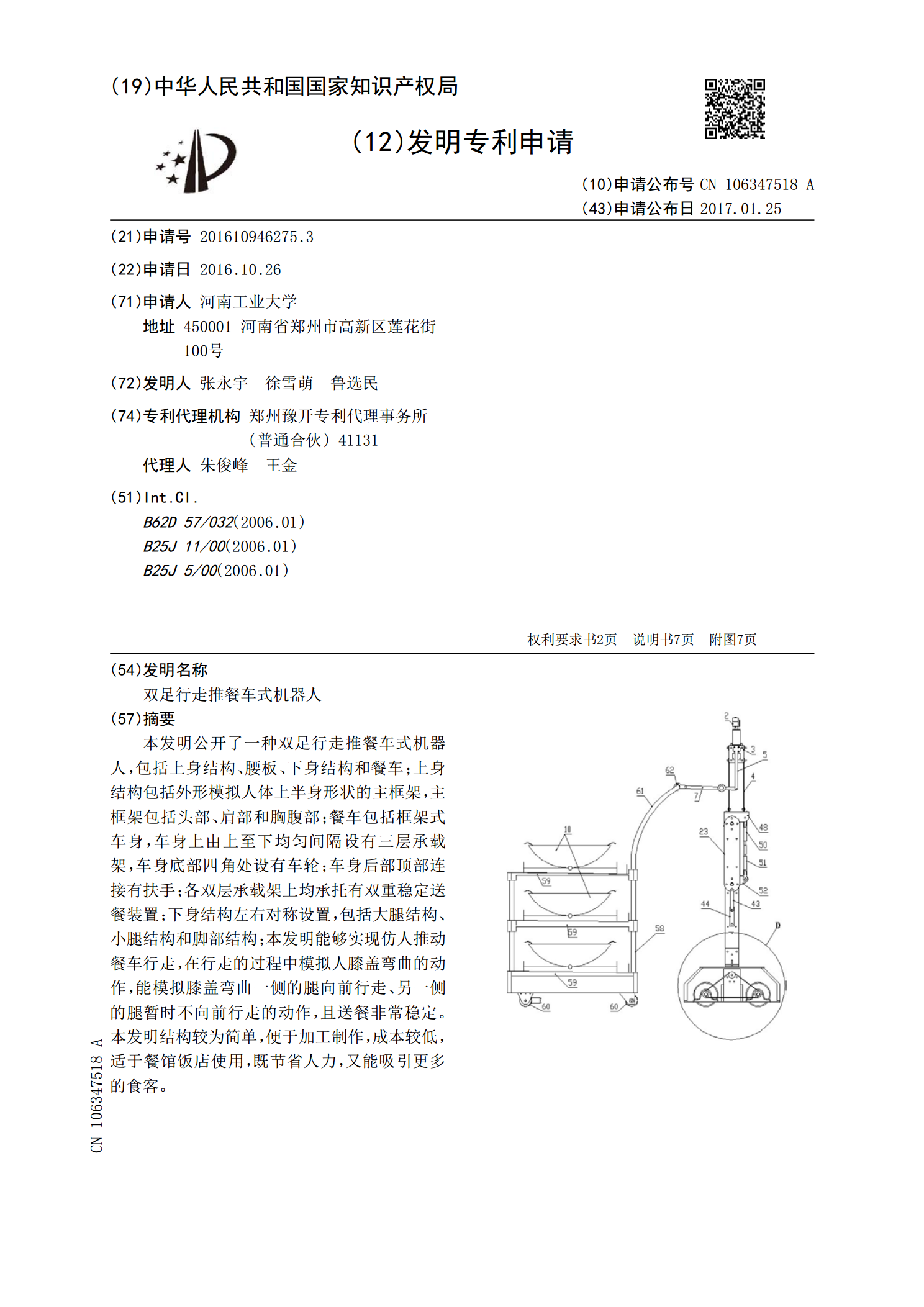
本发明公开了一种双足行走推餐车式机器人,包括上身结构、腰板、下身结构和餐车;上身结构包括外形模拟人体上半身形状的主框架,主框架包括头部、肩部和胸腹部;餐车包括框架式车身,车身上由上至下均匀间隔设有三层承载架,车身底部四角处设有车轮;车身后部顶部连接有扶手;各双层承载架上均承托有双重稳定送餐装置;下身结构左右对称设置,包括大腿结构、小腿结构和脚部结构;本发明能够实现仿人推动餐车行走,在行走的过程中模拟人膝盖弯曲的动作,能模拟膝盖弯曲一侧的腿向前行走、另一侧的腿暂时不向前行走的动作,且送餐非常稳定。本发明结构

独轮双足行走机器人.pdf
本发明公开了一种独轮双足行走机器人,包括机体和安装在机体上的两条仿生腿,机体上还安装有轮腿,轮腿包括腿架和安装在腿架上的一个以上行走滚轮,腿架通过调节组件以能调节高度的方式安装在机体上。该独轮双足行走机器人具有运动灵活性好、适应能力强、适用范围广、结构简单紧凑、成本低廉等优点。

并联五连杆点足式双足机器人稳定行走控制方法.docx
并联五连杆点足式双足机器人稳定行走控制方法并联五连杆点足式双足机器人稳定行走控制方法摘要:随着机器人技术的不断发展,双足机器人作为一种重要的机器人形态,具有广泛的应用前景。然而,双足机器人的稳定行走仍然是一个具有挑战的问题。本文提出了一种并联五连杆点足式的双足机器人稳定行走控制方法。该方法通过对双足机器人的运动进行建模,并利用控制算法实现稳定的行走。通过实验验证,该方法能够实现双足机器人的稳定行走,具有较好的鲁棒性和稳定性。关键词:双足机器人;并联五连杆;点足式;稳定行走;控制方法1.引言双足机器人作为仿

双足行走机器人平衡控制译文.docx
外文资料:Robots1.IntroductionNowadays,theapplicationsofmachinesandrobotstoassisthumaninperformingtheirtaskshasbecomeincreasinglyextensive.Inindustrialapplications,theuseofroboticssystemhasreachedthelevelwhichsurpasseshumanabilityintermsofspeedandaccuracy.Onth

一种双足行走机器人.pdf
本发明涉及机器人技术领域,尤其是一种双足行走机器人,包括四边形框架,所述四边形框架内部设有动力传输机构,所述旋转电机的动力输出轴上固接有第四带轮,所述第四带轮通过皮带与固接在中间转轴上的第三带轮连接,中间转轴上同轴固接有两个第二带轮,两个第二带轮分别置于第三带轮两侧,每个连接板上均转动连接有一个竖直设置的支撑板,每个支撑板底端均固接有一个支撑脚,旋转电机上连接有plc控制器,所述plc控制器连接有自动避障模块、语音播报模块、无线控制模块。本装置结构简单,使用方便,制造成本很低,运动过程中能够通过自动避障模