
车辆辅助驾驶主动限速控制系统研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

车辆辅助驾驶主动限速控制系统研究的中期报告.docx
车辆辅助驾驶主动限速控制系统研究的中期报告中期报告一、研究背景和目的近年来,随着智能化、自动化技术的进步和普及,车辆辅助驾驶系统的应用越来越广泛。其中,主动限速控制系统是一种重要的车辆辅助驾驶系统。该系统可以识别道路限速标志、交通信号灯等交通标志,以及前方车流情况,自动进行车速调整,保持车辆在适当的速度范围内行驶。这样可以提高驾驶安全性,减少交通事故的发生率,具有重大的社会意义和应用价值。因此,本研究旨在开展车辆辅助驾驶主动限速控制系统的研究。主要包括以下内容:1.分析车辆辅助驾驶主动限速控制系统的工作原

车辆辅助驾驶主动限速控制系统研究的任务书.docx
车辆辅助驾驶主动限速控制系统研究的任务书任务书题目:车辆辅助驾驶主动限速控制系统研究背景:随着汽车技术的不断发展,车辆辅助驾驶系统越来越成为汽车行业的热门话题,通过装载各种传感器和控制器,并利用处理算法,实现对车辆的协助和控制,提高行车的安全性和舒适性。在车辆辅助驾驶系统中,主动限速控制系统是一种非常重要的辅助功能,可以帮助驾驶员监测路况和交通情况,自动降低车辆速度,保证驾驶安全。任务描述:本次任务旨在对车辆辅助驾驶主动限速控制系统进行研究,分析其原理和应用场景,重点考察以下内容:1.主动限速控制系统原理

基于视觉的辅助驾驶系统车辆主动转向控制研究.docx
基于视觉的辅助驾驶系统车辆主动转向控制研究基于视觉的辅助驾驶系统车辆主动转向控制研究摘要:随着汽车工业的不断发展和人们对安全驾驶的需求增加,基于视觉的辅助驾驶系统在现代汽车上得到了广泛的应用。其中,车辆主动转向控制系统作为其中一个核心组成部分,对于车辆的操控和安全至关重要。本论文将从视觉感知角度出发,研究基于视觉的辅助驾驶系统车辆主动转向控制,并介绍了相关的技术和方法。1.引言随着交通事故的频发和交通拥堵问题的突出,辅助驾驶技术越来越受到关注。基于视觉的辅助驾驶系统通过利用摄像头等视觉感知器件,对周围环境

车辆驾驶辅助装置及车辆驾驶辅助控制方法.pdf
本申请公开了一种车辆驾驶辅助装置及车辆驾驶辅助控制方法。该装置包括:图像采集模块,用于获取交通标志对应的交通标志图像;指令确定模块,用于确定所述交通标志图像对应的操作指令;状态感应模块,用于检测车辆是否执行所述操作指令;控制模块,用于在所述车辆未执行所述操作指令时,控制所述车辆执行所述操作指令。通过识别交通标志来辅助驾驶员驾驶,在驾驶员无法及时执行与交通标志图像对应的操作指令时,可以将车辆驾驶模式从人工驾驶模式切换至自动驾驶模式,并自动执行与交通标志图像对应的操作指令,从而避免因驾驶员无法及时操作而引起的
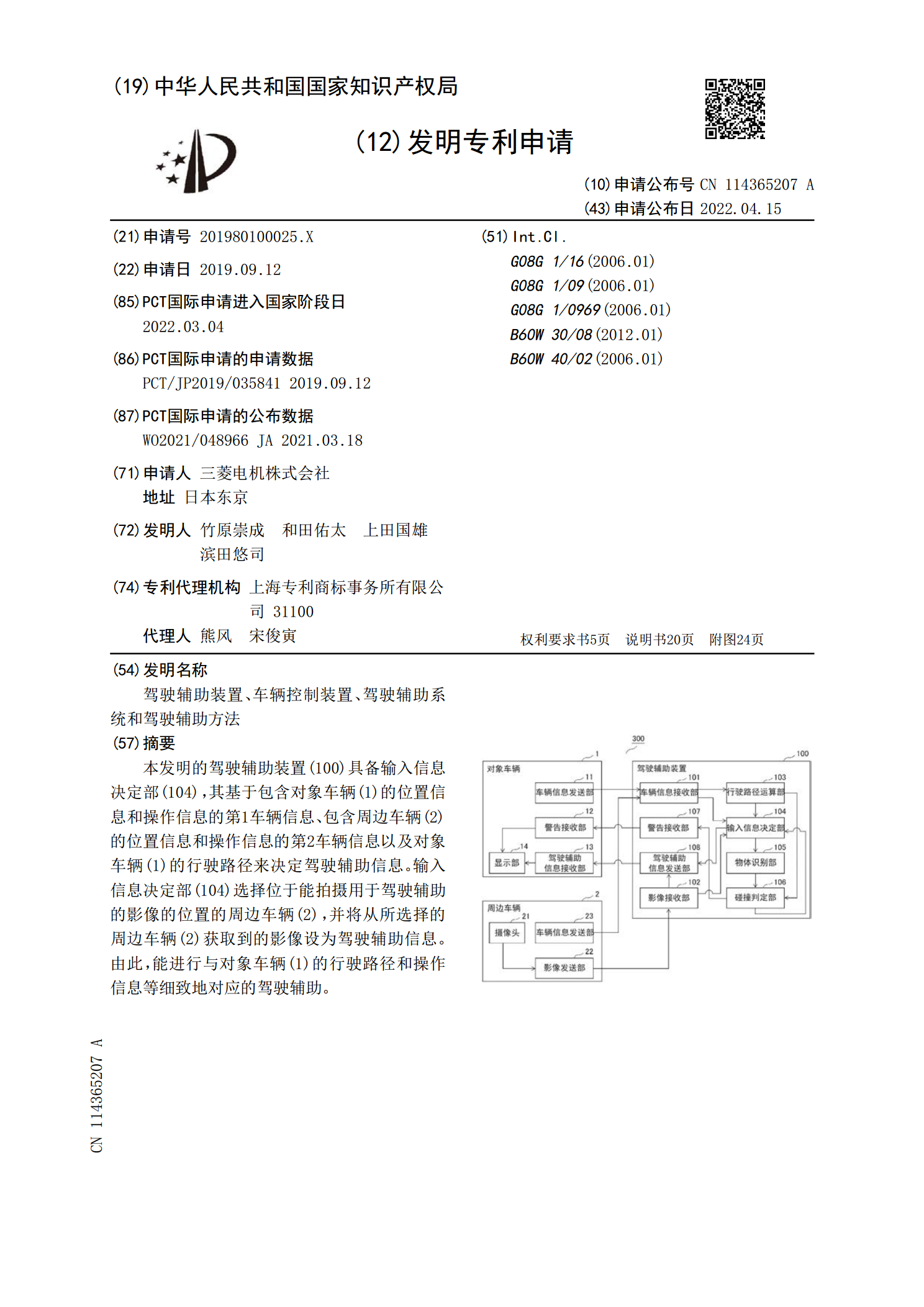
驾驶辅助装置、车辆控制装置、驾驶辅助系统和驾驶辅助方法.pdf
本发明的驾驶辅助装置(100)具备输入信息决定部(104),其基于包含对象车辆(1)的位置信息和操作信息的第1车辆信息、包含周边车辆(2)的位置信息和操作信息的第2车辆信息以及对象车辆(1)的行驶路径来决定驾驶辅助信息。输入信息决定部(104)选择位于能拍摄用于驾驶辅助的影像的位置的周边车辆(2),并将从所选择的周边车辆(2)获取到的影像设为驾驶辅助信息。由此,能进行与对象车辆(1)的行驶路径和操作信息等细致地对应的驾驶辅助。