
基于视觉的辅助驾驶系统车辆主动转向控制研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于视觉的辅助驾驶系统车辆主动转向控制研究.docx
基于视觉的辅助驾驶系统车辆主动转向控制研究基于视觉的辅助驾驶系统车辆主动转向控制研究摘要:随着汽车工业的不断发展和人们对安全驾驶的需求增加,基于视觉的辅助驾驶系统在现代汽车上得到了广泛的应用。其中,车辆主动转向控制系统作为其中一个核心组成部分,对于车辆的操控和安全至关重要。本论文将从视觉感知角度出发,研究基于视觉的辅助驾驶系统车辆主动转向控制,并介绍了相关的技术和方法。1.引言随着交通事故的频发和交通拥堵问题的突出,辅助驾驶技术越来越受到关注。基于视觉的辅助驾驶系统通过利用摄像头等视觉感知器件,对周围环境
基于视觉的主动转向系统.pdf
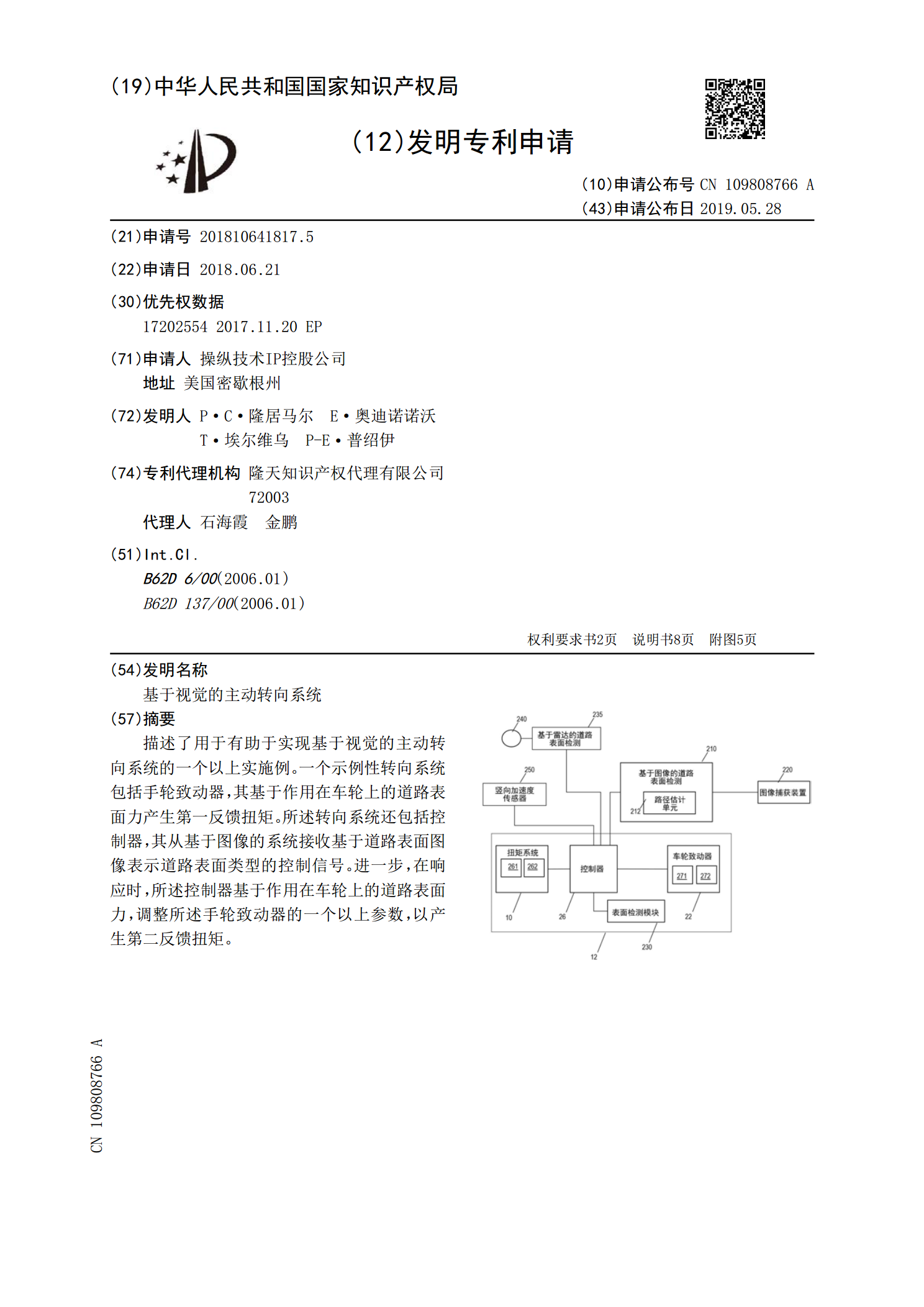
描述了用于有助于实现基于视觉的主动转向系统的一个以上实施例。一个示例性转向系统包括手轮致动器,其基于作用在车轮上的道路表面力产生第一反馈扭矩。所述转向系统还包括控制器,其从基于图像的系统接收基于道路表面图像表示道路表面类型的控制信号。进一步,在响应时,所述控制器基于作用在车轮上的道路表面力,调整所述手轮致动器的一个以上参数,以产生第二反馈扭矩。

基于DSP的全景视觉辅助驾驶系统的研究.docx
基于DSP的全景视觉辅助驾驶系统的研究随着科技的不断发展,人类生活的各个领域也在不断地发生着变化。汽车行业作为现代人们日常生活中必不可少的交通工具,一直在不断地进行改革和创新,推动着整个行业的发展。其中,全景视觉辅助驾驶系统作为汽车行业近年来发展的热门方向之一,备受关注。本文将从DSP技术出发,介绍全景视觉辅助驾驶系统的研究。一、全景视觉辅助驾驶系统简介全景视觉辅助驾驶系统是一种辅助驾驶技术,其核心是通过多种传感器获取车辆周围环境信息,将数据进行处理分析并反馈给驾驶员,从而提升驾驶员对车辆周围环境的感知能

车辆辅助驾驶主动限速控制系统研究的中期报告.docx
车辆辅助驾驶主动限速控制系统研究的中期报告中期报告一、研究背景和目的近年来,随着智能化、自动化技术的进步和普及,车辆辅助驾驶系统的应用越来越广泛。其中,主动限速控制系统是一种重要的车辆辅助驾驶系统。该系统可以识别道路限速标志、交通信号灯等交通标志,以及前方车流情况,自动进行车速调整,保持车辆在适当的速度范围内行驶。这样可以提高驾驶安全性,减少交通事故的发生率,具有重大的社会意义和应用价值。因此,本研究旨在开展车辆辅助驾驶主动限速控制系统的研究。主要包括以下内容:1.分析车辆辅助驾驶主动限速控制系统的工作原

基于机器视觉的车辆辅助驾驶系统关键问题研究的中期报告.docx
基于机器视觉的车辆辅助驾驶系统关键问题研究的中期报告尊敬的评审专家,我将为您呈现基于机器视觉的车辆辅助驾驶系统关键问题研究的中期报告。一、课题背景与研究意义随着汽车技术的不断发展,越来越多的车辆开始使用辅助驾驶系统,这些系统可以帮助驾驶员保持车速、车道和安全距离,减少人为驾驶的疲劳和错误,提高行驶的安全性和舒适性。机器视觉是车辆辅助驾驶系统不可或缺的技术之一,它通过感知和理解车辆周围环境,提供对驾驶员决策的建议。然而,目前车辆辅助驾驶系统仍存在诸多问题。例如,在复杂的环境中,系统难以准确识别障碍物或行人;