
一种扫地机器人智能驱动自适应行走机构.pdf

雨巷****可歆


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种扫地机器人智能驱动自适应行走机构.pdf
本发明涉及一种扫地机器人智能驱动自适应行走机构,包括行走控制模块(6)和设置于扫地机器人本体(1)下表面的行走机构,行走机构包括至少四个子行走机构,各个子行走机构分别包括预设长度的差位杆(2)、转动电机(4)、速度传感器(5)、电机驱动电路(7)和两个电动轮(3);基于本发明设计的技术方案,针对上述各装置进行连接,构成本发明设计的扫地机器人智能驱动自适应行走机构,大大提高了扫地机器人行走过程中的通过性,能够实现更大范围的清扫,有效保证了扫地机器人的清扫工作效率。
一种扫地机器人智能自适应行走机构.pdf
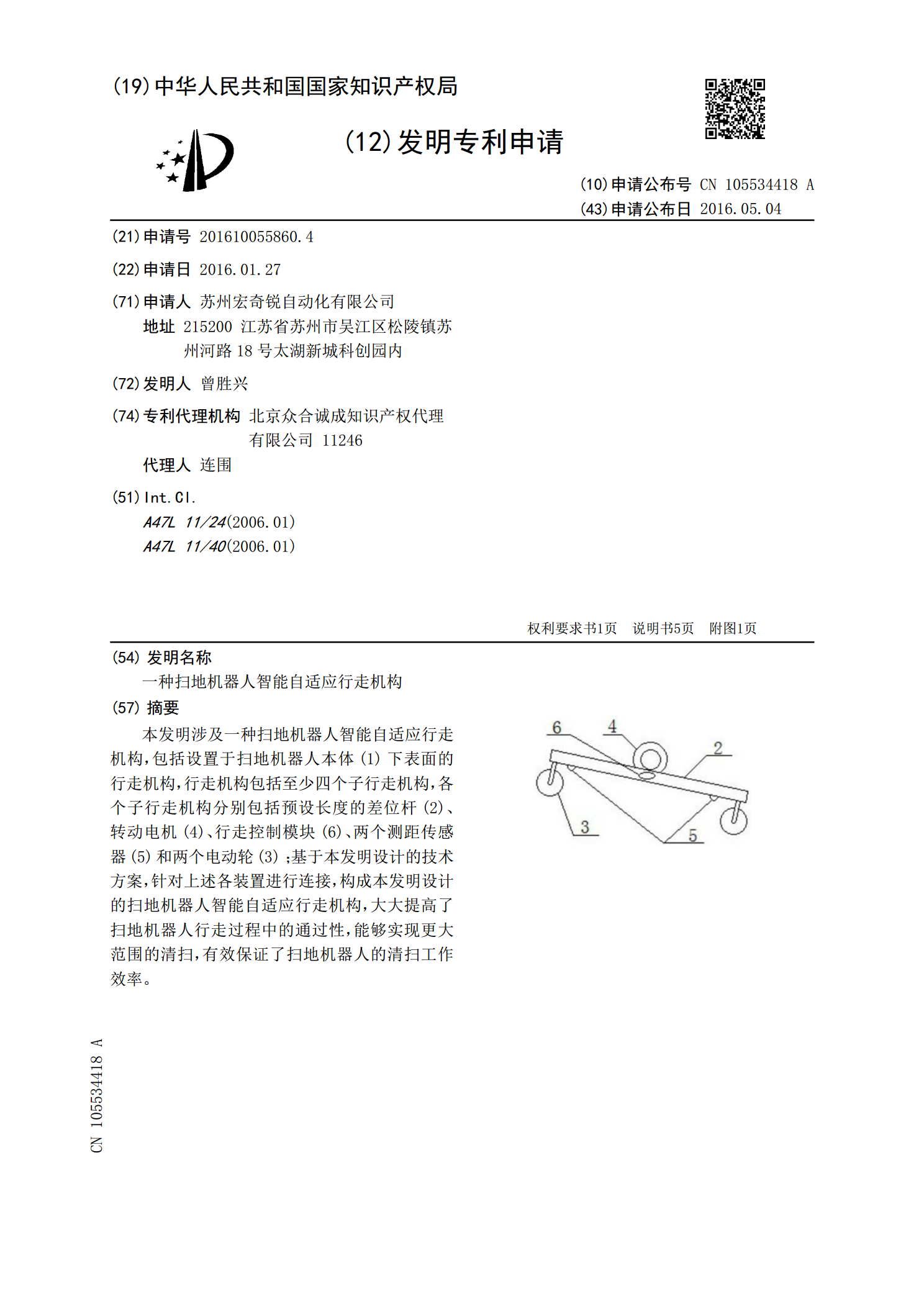
本发明涉及一种扫地机器人智能自适应行走机构,包括设置于扫地机器人本体(1)下表面的行走机构,行走机构包括至少四个子行走机构,各个子行走机构分别包括预设长度的差位杆(2)、转动电机(4)、行走控制模块(6)、两个测距传感器(5)和两个电动轮(3);基于本发明设计的技术方案,针对上述各装置进行连接,构成本发明设计的扫地机器人智能自适应行走机构,大大提高了扫地机器人行走过程中的通过性,能够实现更大范围的清扫,有效保证了扫地机器人的清扫工作效率。

一种扫地机器人智能滤波自适应行走机构.pdf
本发明涉及一种扫地机器人智能滤波自适应行走机构,包括设置于扫地机器人本体(1)下表面的行走机构,行走机构包括至少四个子行走机构,各个子行走机构分别包括预设长度的差位杆(2)、转动电机(4)、行走控制模块(6)、滤波电路(7)、两个测距传感器(5)和两个电动轮(3);基于本发明设计的技术方案,针对上述各装置进行连接,构成本发明设计的扫地机器人智能滤波自适应行走机构,大大提高了扫地机器人行走过程中的通过性,能够实现更大范围的清扫,有效保证了扫地机器人的清扫工作效率。
一种扫地机器人自适应行走机构.pdf
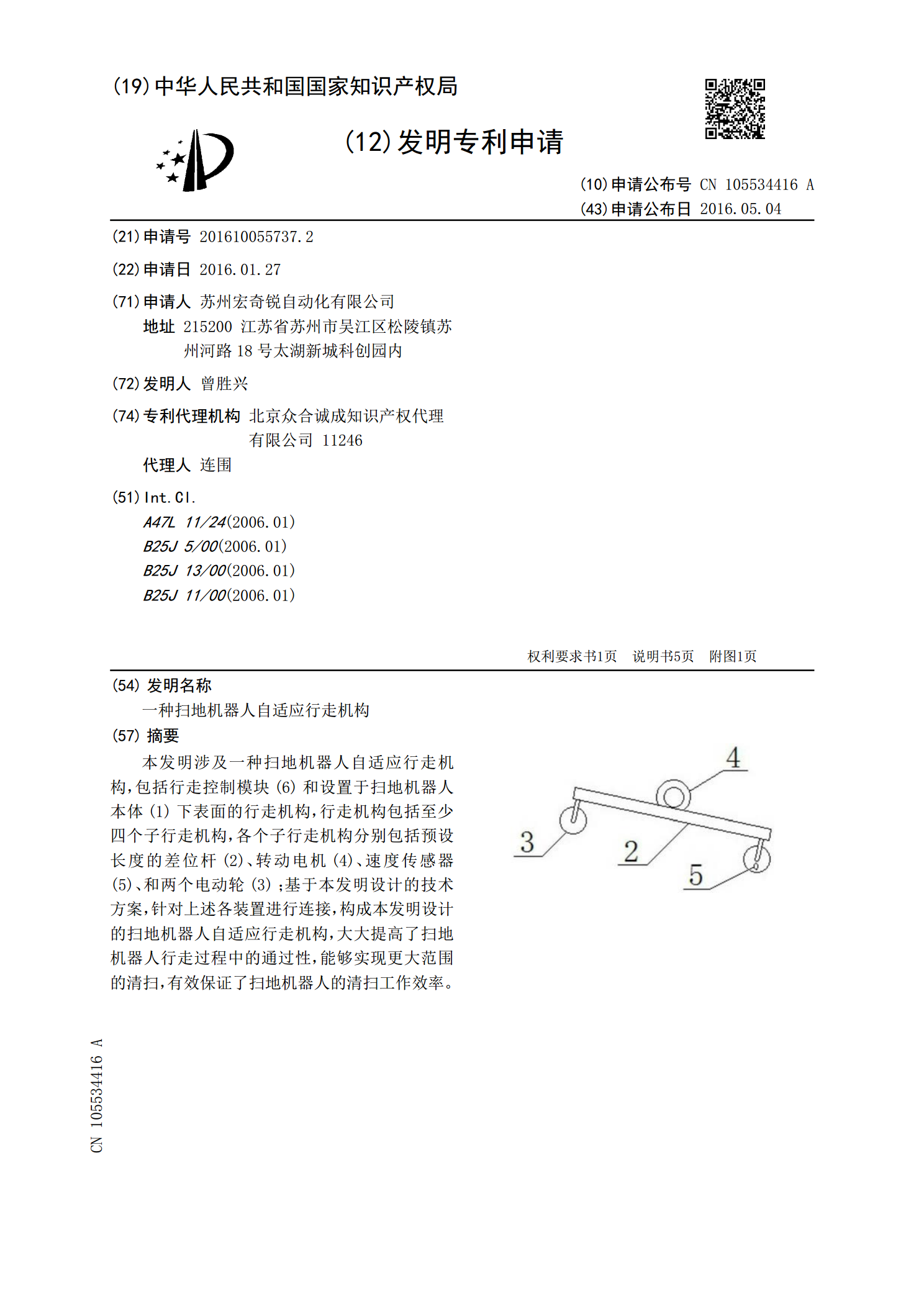
本发明涉及一种扫地机器人自适应行走机构,包括行走控制模块(6)和设置于扫地机器人本体(1)下表面的行走机构,行走机构包括至少四个子行走机构,各个子行走机构分别包括预设长度的差位杆(2)、转动电机(4)、速度传感器(5)、和两个电动轮(3);基于本发明设计的技术方案,针对上述各装置进行连接,构成本发明设计的扫地机器人自适应行走机构,大大提高了扫地机器人行走过程中的通过性,能够实现更大范围的清扫,有效保证了扫地机器人的清扫工作效率。
一种智能扫地机器人的行走机构.pdf
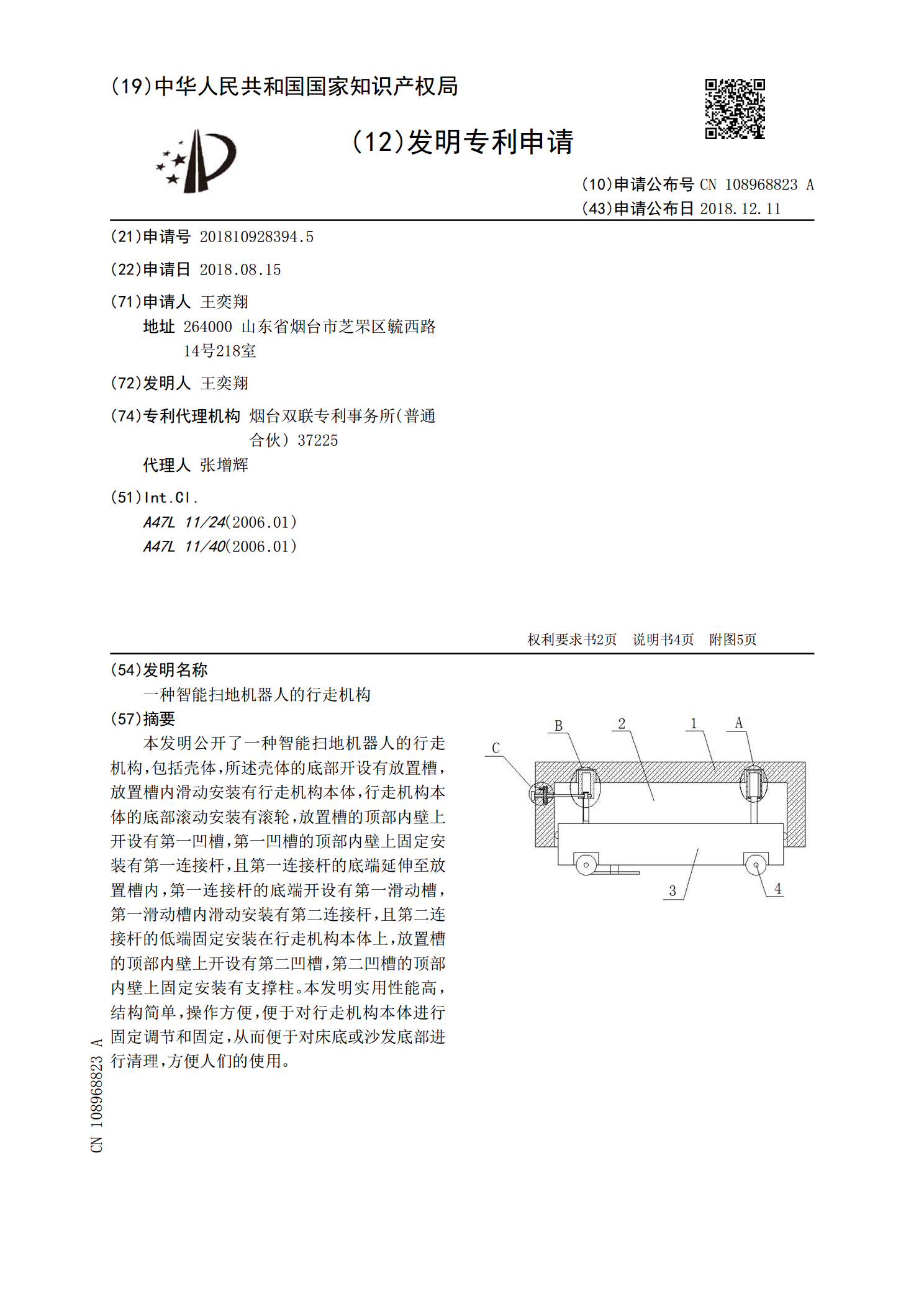
本发明公开了一种智能扫地机器人的行走机构,包括壳体,所述壳体的底部开设有放置槽,放置槽内滑动安装有行走机构本体,行走机构本体的底部滚动安装有滚轮,放置槽的顶部内壁上开设有第一凹槽,第一凹槽的顶部内壁上固定安装有第一连接杆,且第一连接杆的底端延伸至放置槽内,第一连接杆的底端开设有第一滑动槽,第一滑动槽内滑动安装有第二连接杆,且第二连接杆的低端固定安装在行走机构本体上,放置槽的顶部内壁上开设有第二凹槽,第二凹槽的顶部内壁上固定安装有支撑柱。本发明实用性能高,结构简单,操作方便,便于对行走机构本体进行固定调节和