
自动化抛光打磨机器人.pdf

宛菡****魔王


1/5
2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自动化抛光打磨机器人.pdf
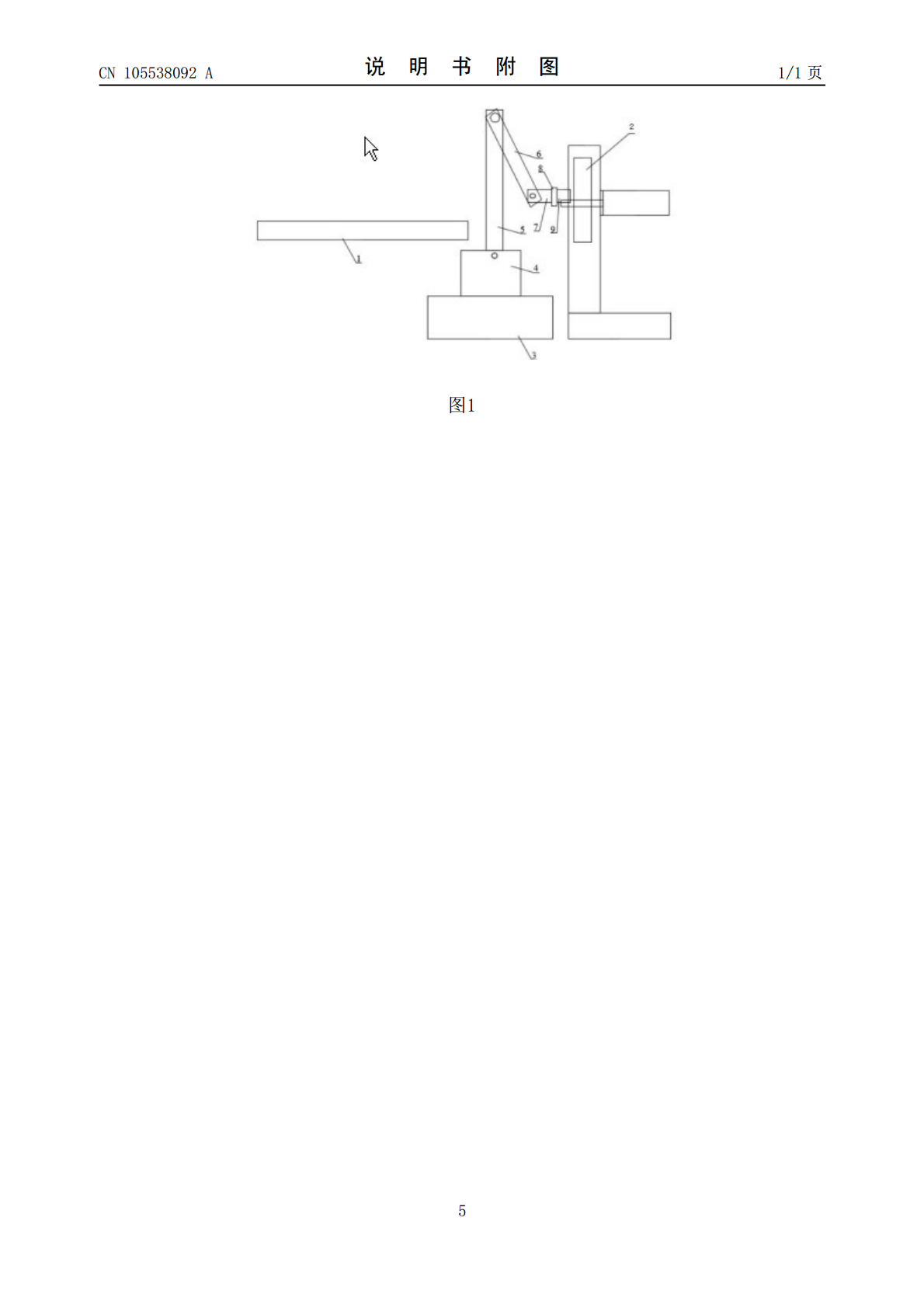
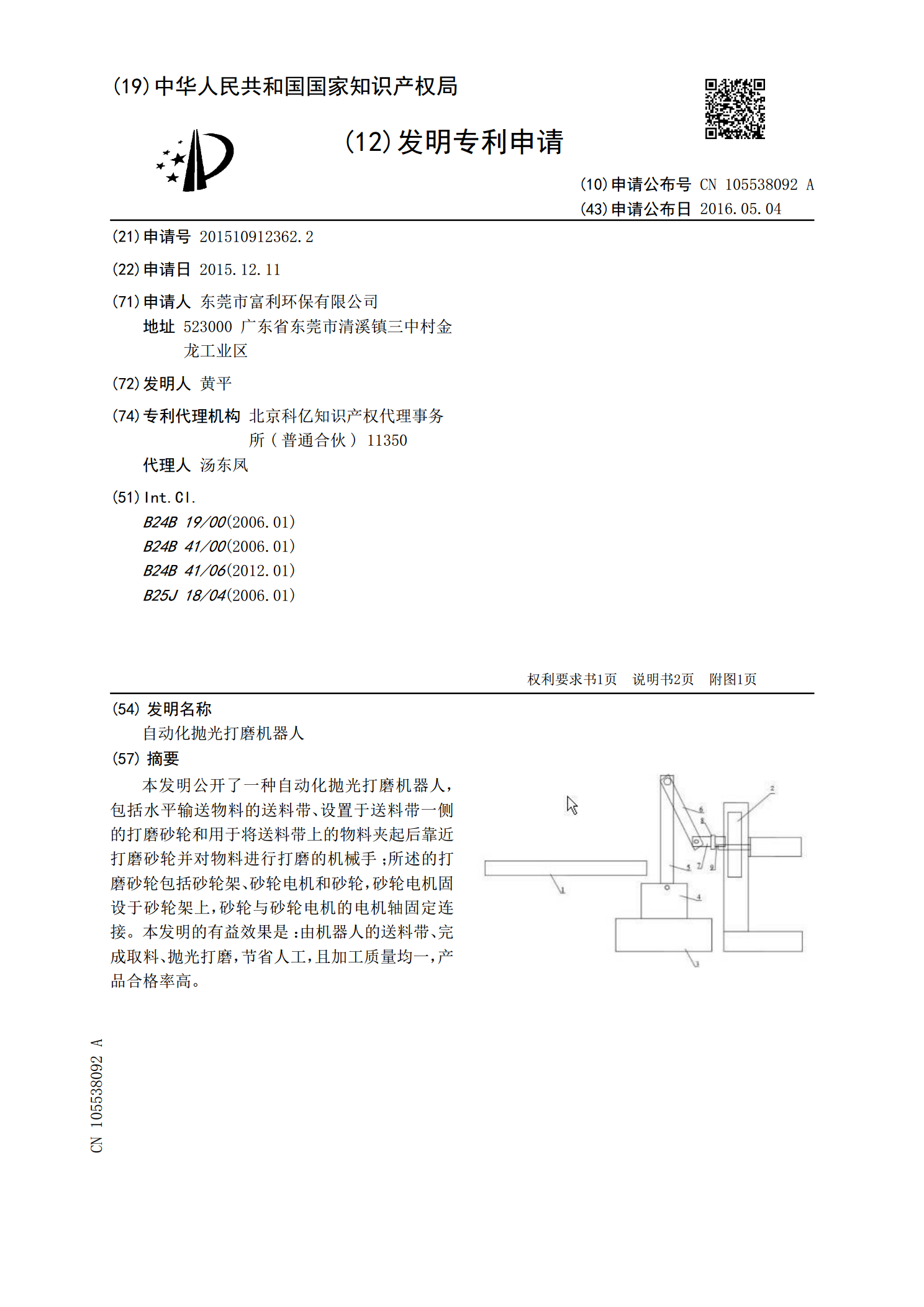
本发明公开了一种自动化抛光打磨机器人,包括水平输送物料的送料带、设置于送料带一侧的打磨砂轮和用于将送料带上的物料夹起后靠近打磨砂轮并对物料进行打磨的机械手;所述的打磨砂轮包括砂轮架、砂轮电机和砂轮,砂轮电机固设于砂轮架上,砂轮与砂轮电机的电机轴固定连接。本发明的有益效果是:由机器人的送料带、完成取料、抛光打磨,节省人工,且加工质量均一,产品合格率高。
打磨抛光机器人.pdf
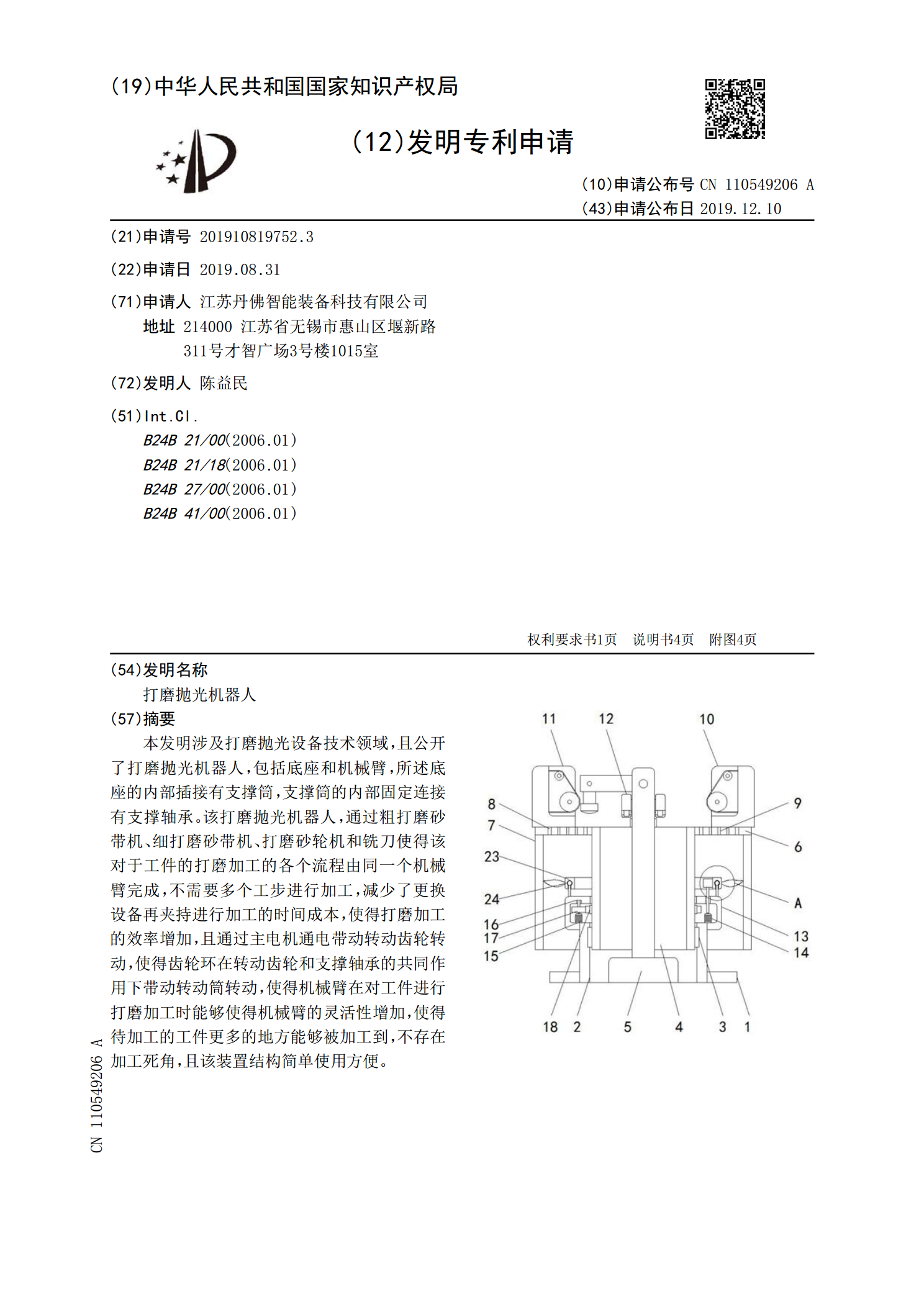
本发明涉及打磨抛光设备技术领域,且公开了打磨抛光机器人,包括底座和机械臂,所述底座的内部插接有支撑筒,支撑筒的内部固定连接有支撑轴承。该打磨抛光机器人,通过粗打磨砂带机、细打磨砂带机、打磨砂轮机和铣刀使得该对于工件的打磨加工的各个流程由同一个机械臂完成,不需要多个工步进行加工,减少了更换设备再夹持进行加工的时间成本,使得打磨加工的效率增加,且通过主电机通电带动转动齿轮转动,使得齿轮环在转动齿轮和支撑轴承的共同作用下带动转动筒转动,使得机械臂在对工件进行打磨加工时能够使得机械臂的灵活性增加,使得待加工的工件
机器人抛光打磨系统.pdf
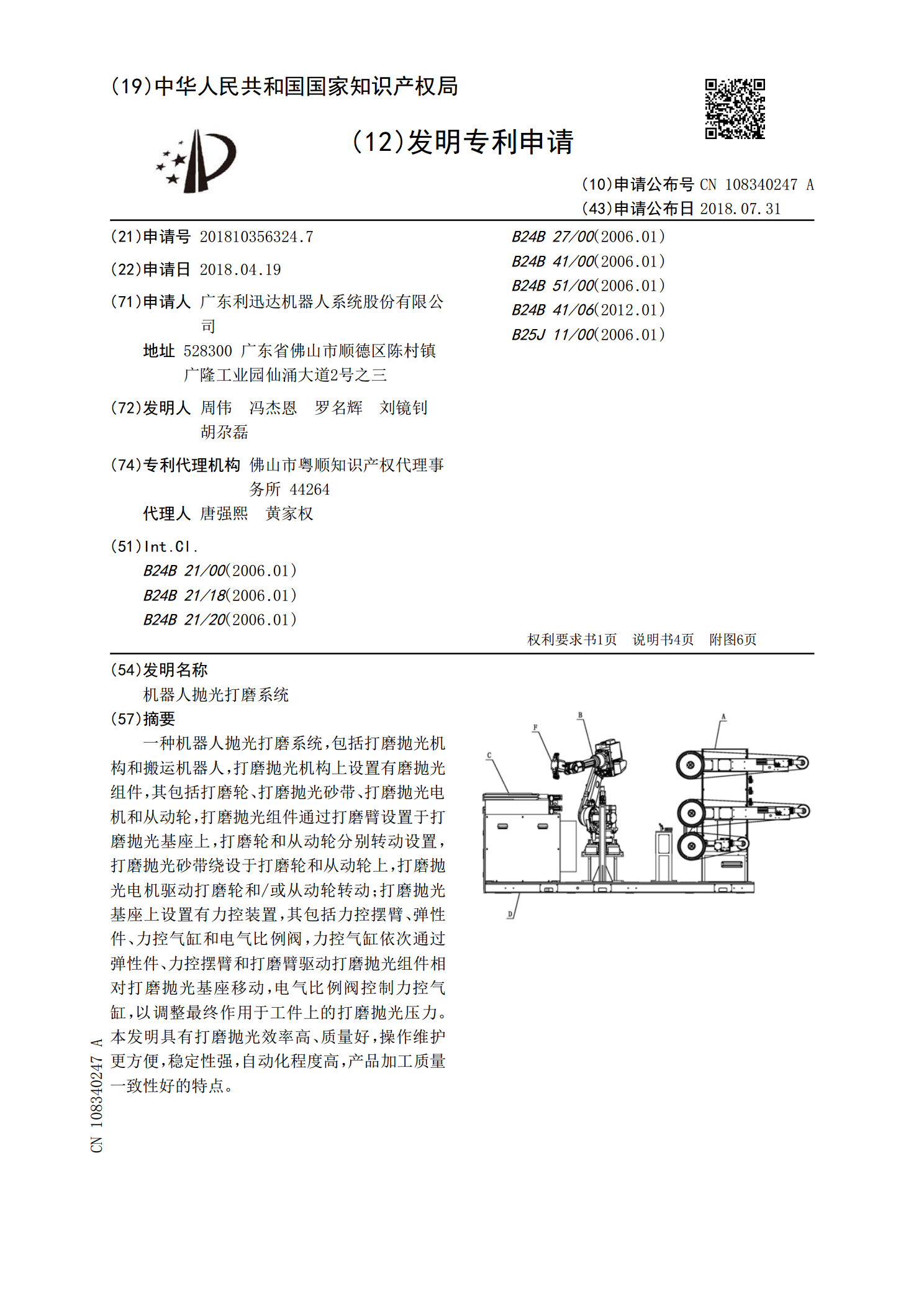
一种机器人抛光打磨系统,包括打磨抛光机构和搬运机器人,打磨抛光机构上设置有磨抛光组件,其包括打磨轮、打磨抛光砂带、打磨抛光电机和从动轮,打磨抛光组件通过打磨臂设置于打磨抛光基座上,打磨轮和从动轮分别转动设置,打磨抛光砂带绕设于打磨轮和从动轮上,打磨抛光电机驱动打磨轮和/或从动轮转动;打磨抛光基座上设置有力控装置,其包括力控摆臂、弹性件、力控气缸和电气比例阀,力控气缸依次通过弹性件、力控摆臂和打磨臂驱动打磨抛光组件相对打磨抛光基座移动,电气比例阀控制力控气缸,以调整最终作用于工件上的打磨抛光压力。本发明具有
一种工业机器人的打磨抛光工具及打磨抛光控制方法.pdf
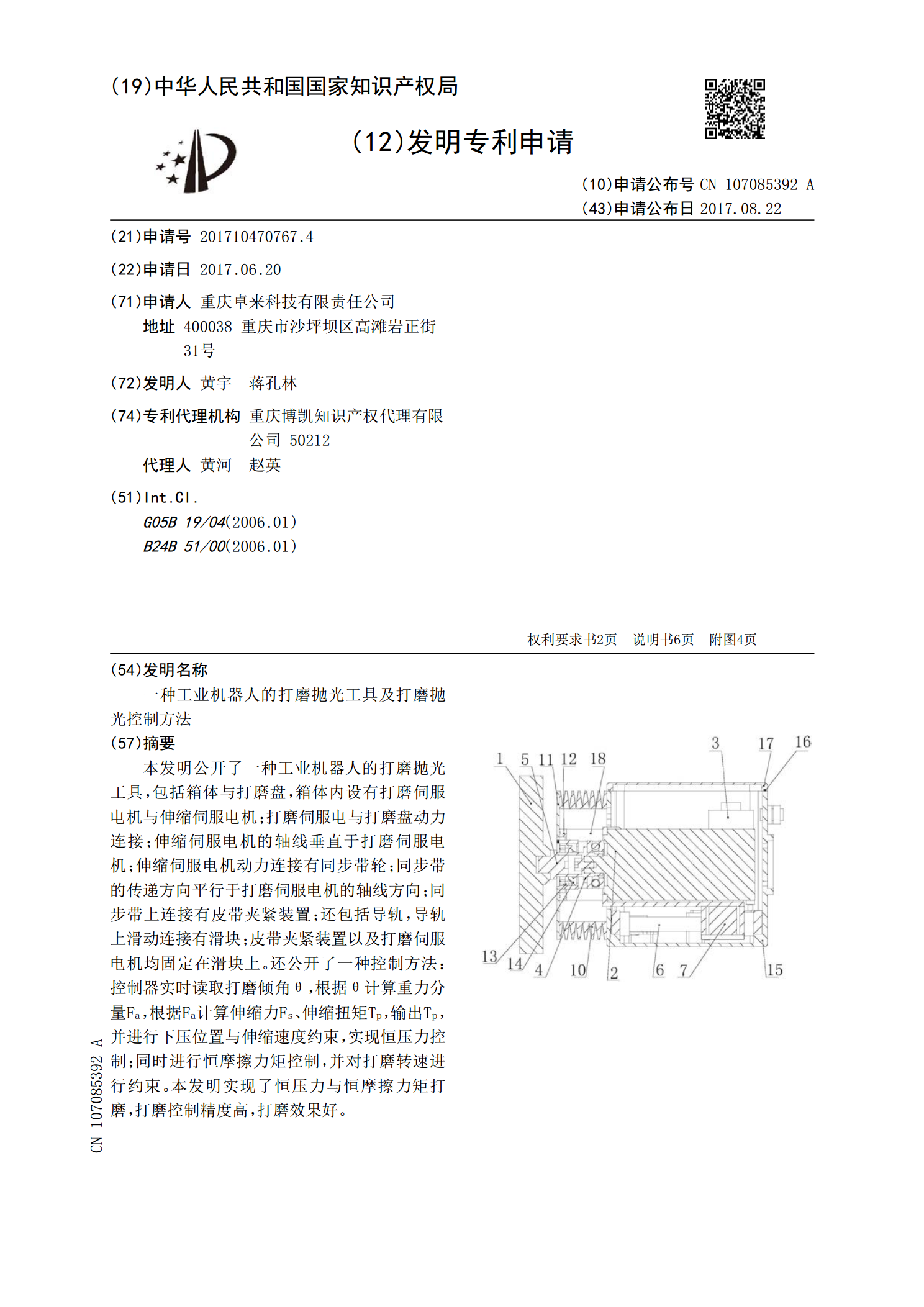
本发明公开了一种工业机器人的打磨抛光工具,包括箱体与打磨盘,箱体内设有打磨伺服电机与伸缩伺服电机;打磨伺服电与打磨盘动力连接;伸缩伺服电机的轴线垂直于打磨伺服电机;伸缩伺服电机动力连接有同步带轮;同步带的传递方向平行于打磨伺服电机的轴线方向;同步带上连接有皮带夹紧装置;还包括导轨,导轨上滑动连接有滑块;皮带夹紧装置以及打磨伺服电机均固定在滑块上。还公开了一种控制方法:控制器实时读取打磨倾角θ,根据θ计算重力分量F

机器人打磨抛光的工艺研究.docx
机器人打磨抛光的工艺研究随着科技的不断发展,机器人技术在各行各业中的应用越来越广泛,其中机器人打磨抛光技术在制造业中尤为重要。机器人打磨抛光能够提高生产效率、产品质量,减少人力成本和磨损,而在某些情况下,机器人打磨抛光还可以避免人工打磨可能会对人体健康造成的危害。一、机器人打磨抛光工艺的优势1、提高生产效率,降低成本。机器人具备传统手工打磨不具备的优点,比如不会疲劳,不需要人员看护,全天候工作,能够提高生产效率,降低生产成本,从而提高了企业竞争力。2、减少人工磨损与传统的手工打磨相比,机器人打磨抛光不会因