
电缆管道巡检机器人.pdf

森林****io

1/8
2/8
3/8

4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
电缆管道巡检机器人.pdf
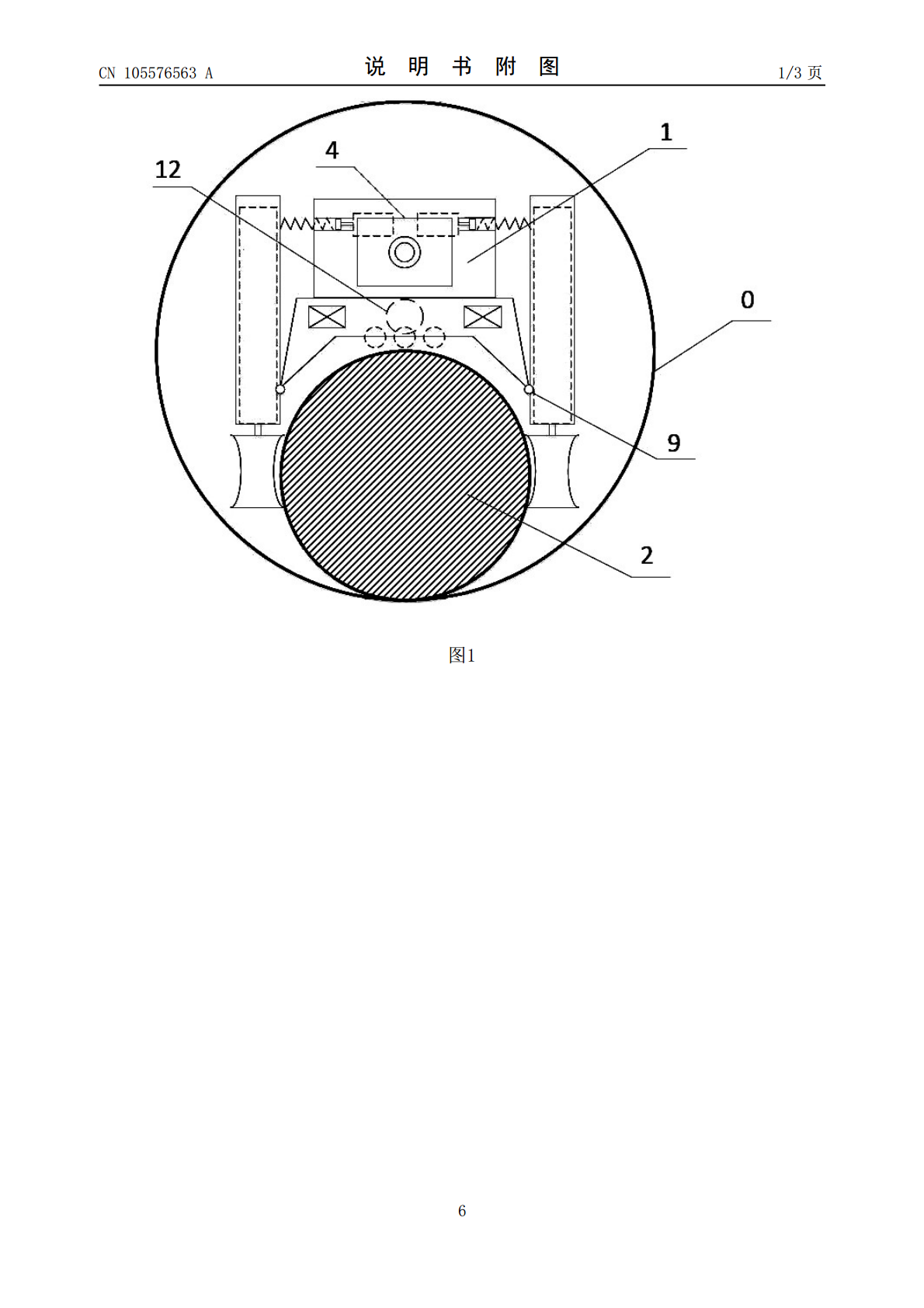
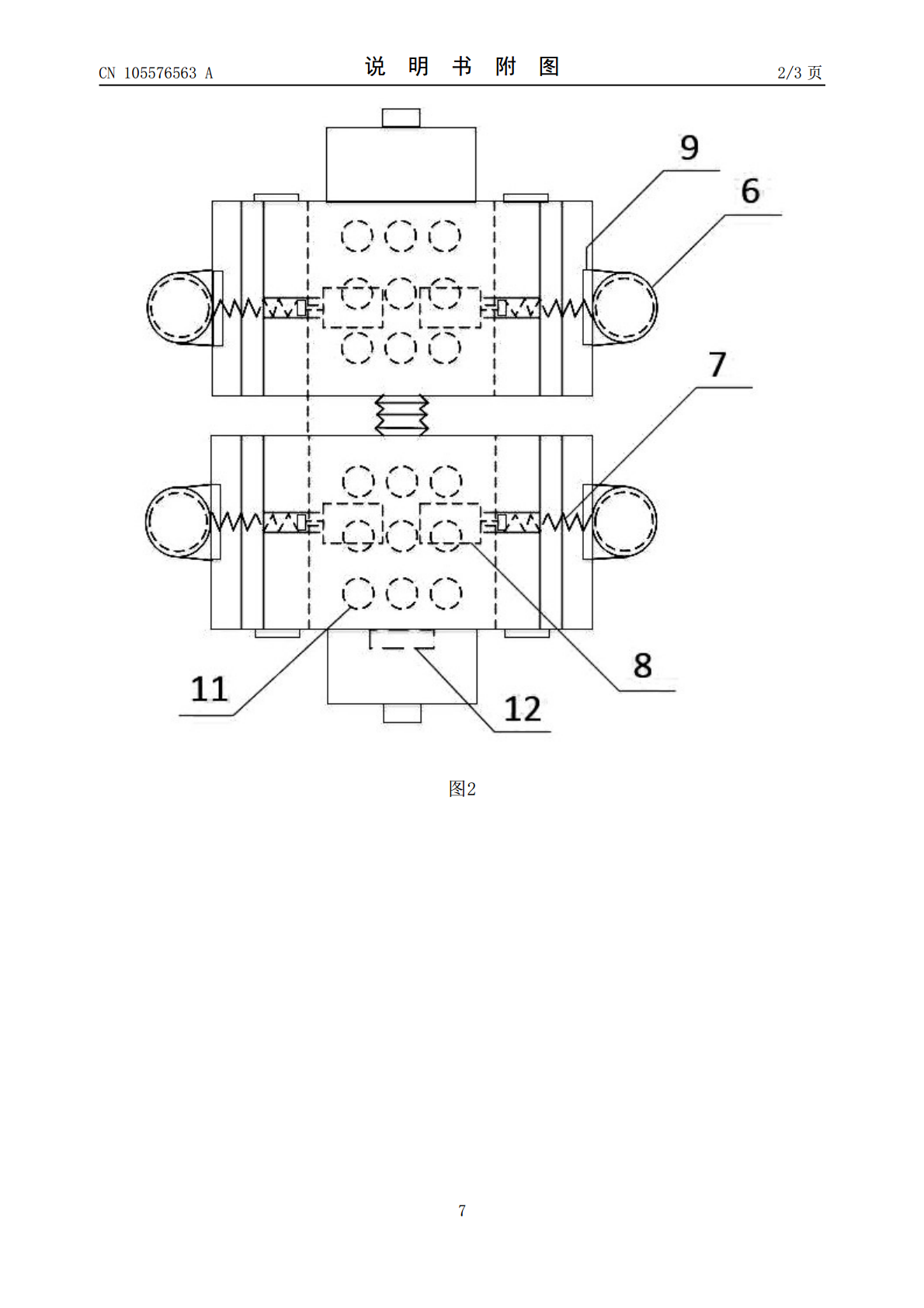
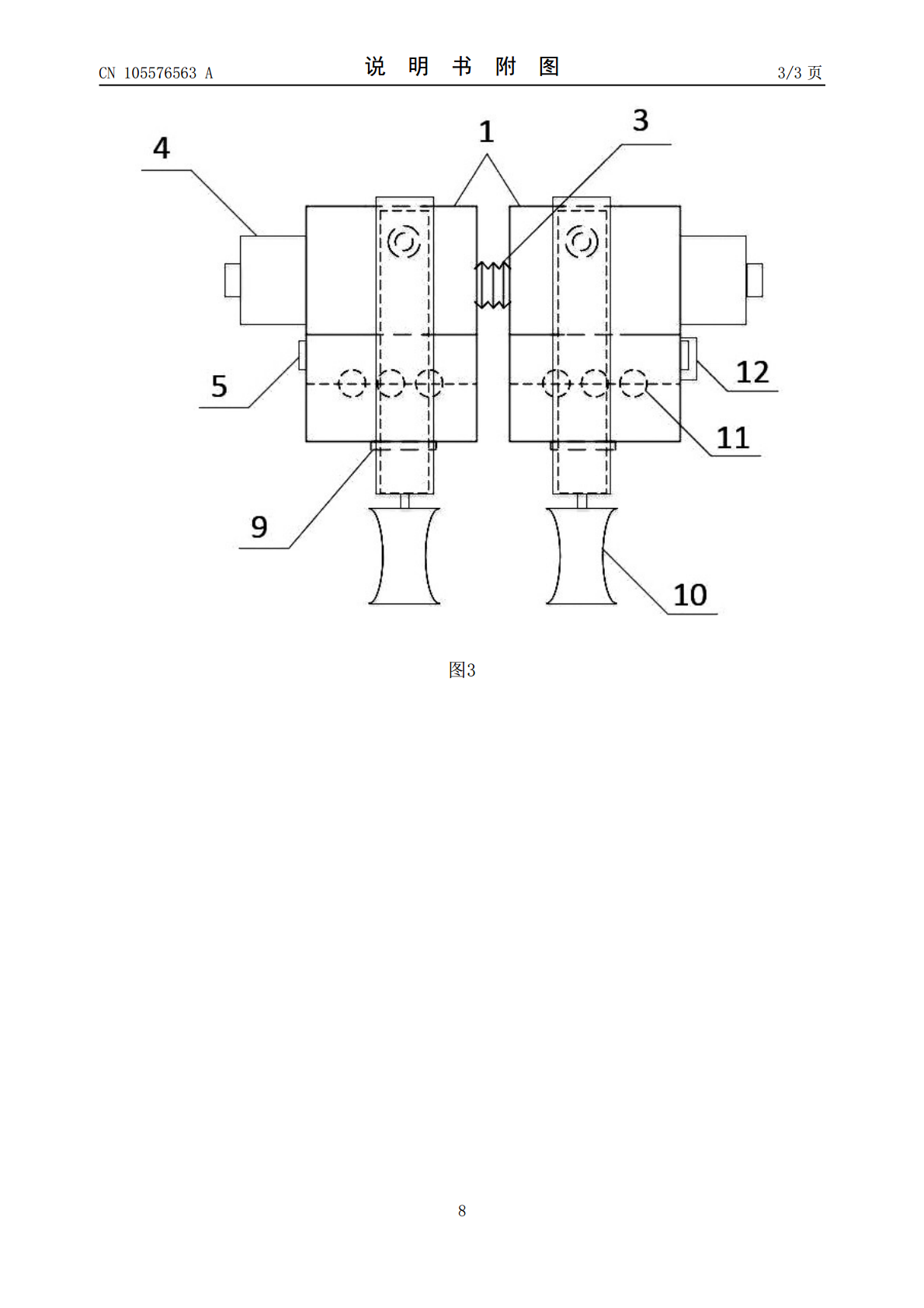
电缆管道巡检机器人,涉及一种巡检机器。目前无专门针对有电缆管道的巡检机器人。本发明包括两段式车体、设置在车体前后的摄像检测组件、设置在车体两侧的行走机构及其辅助移动机构;摄像检测组件包括两台高清摄像机和两组变亮度LED灯,行走机构包括两组行走轮、驱动行走轮滚动的电机,与电机相连的行走轮转轴竖向设置,行走轮的竖向截面侧边呈内凹弧形以夹紧管道内铺设的电缆线路行走移动,辅助移动机构包括车体下方的多组滚珠和连接于电机保护外壳上方以使行走轮夹紧电缆的推动机构;车体内部设有控制器,控制器与行走机构、摄像检测组件相连。
一种电缆管道巡检清洁机器人.pdf
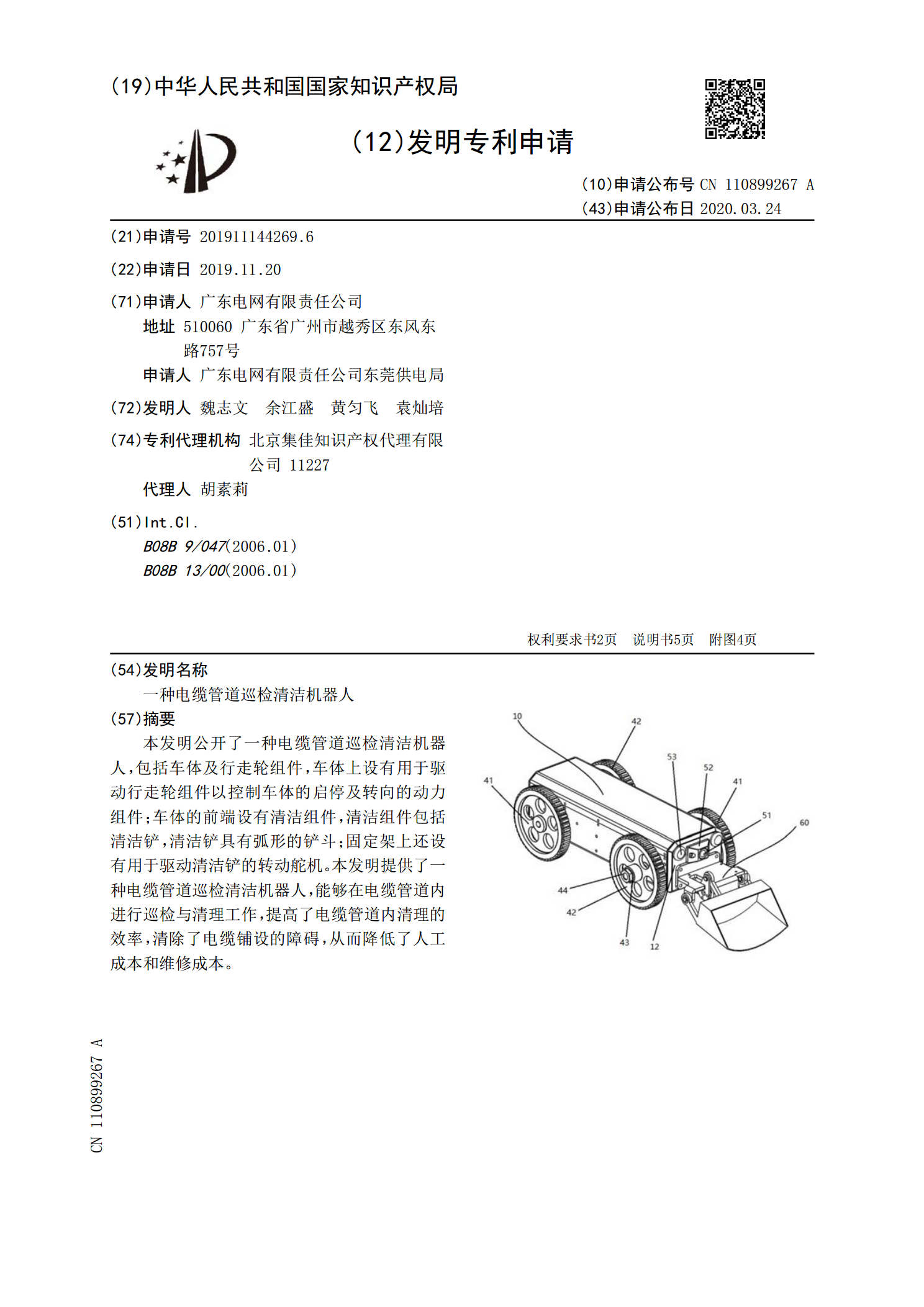
本发明公开了一种电缆管道巡检清洁机器人,包括车体及行走轮组件,车体上设有用于驱动行走轮组件以控制车体的启停及转向的动力组件;车体的前端设有清洁组件,清洁组件包括清洁铲,清洁铲具有弧形的铲斗;固定架上还设有用于驱动清洁铲的转动舵机。本发明提供了一种电缆管道巡检清洁机器人,能够在电缆管道内进行巡检与清理工作,提高了电缆管道内清理的效率,清除了电缆铺设的障碍,从而降低了人工成本和维修成本。

电缆管道巡检机器人远程测控系统的研究与实现.docx
电缆管道巡检机器人远程测控系统的研究与实现电缆管道巡检机器人远程测控系统的研究与实现摘要:随着现代化建设的不断推进,电缆管道的建设与维护任务变得愈发重要。为了保证管道的安全运行和及时检修,远程测控系统在电缆管道巡检中发挥着重要作用。本文主要研究了电缆管道巡检机器人远程测控系统的设计、研究以及实现方法,并对其在电缆管道巡检中的应用进行了探讨。关键词:电缆管道、巡检机器人、远程测控系统、设计、研究、实现一、引言随着现代化社会的快速发展,电缆管道的建设和维护任务变得越来越重要。电缆管道巡检是保证电力系统运行安全

电缆管道巡检清理机器人的研究与设计的任务书.docx
电缆管道巡检清理机器人的研究与设计的任务书一、任务背景电缆管道是城市电力、通讯、铁路、燃气等重要行业设施的基础设施之一。然而,由于电缆管道通常被埋入地下,难以进行实时检测和维护,一旦出现故障,维修难度较大,且可能会对周边环境造成影响。因此,我们有必要研究一种能够自主巡检和清理电缆管道的机器人。二、任务目的本任务的主要目的是研究一种能够自主巡检和清理电缆管道的机器人,以提高电缆管道的安全运行和维护效率。具体目标如下:1.设计一种结构紧凑、机动灵活、通用性好的机器人;2.研究一种能够适应各种环境、具有高精度定
一种海底管道巡检机器人巡检架.pdf
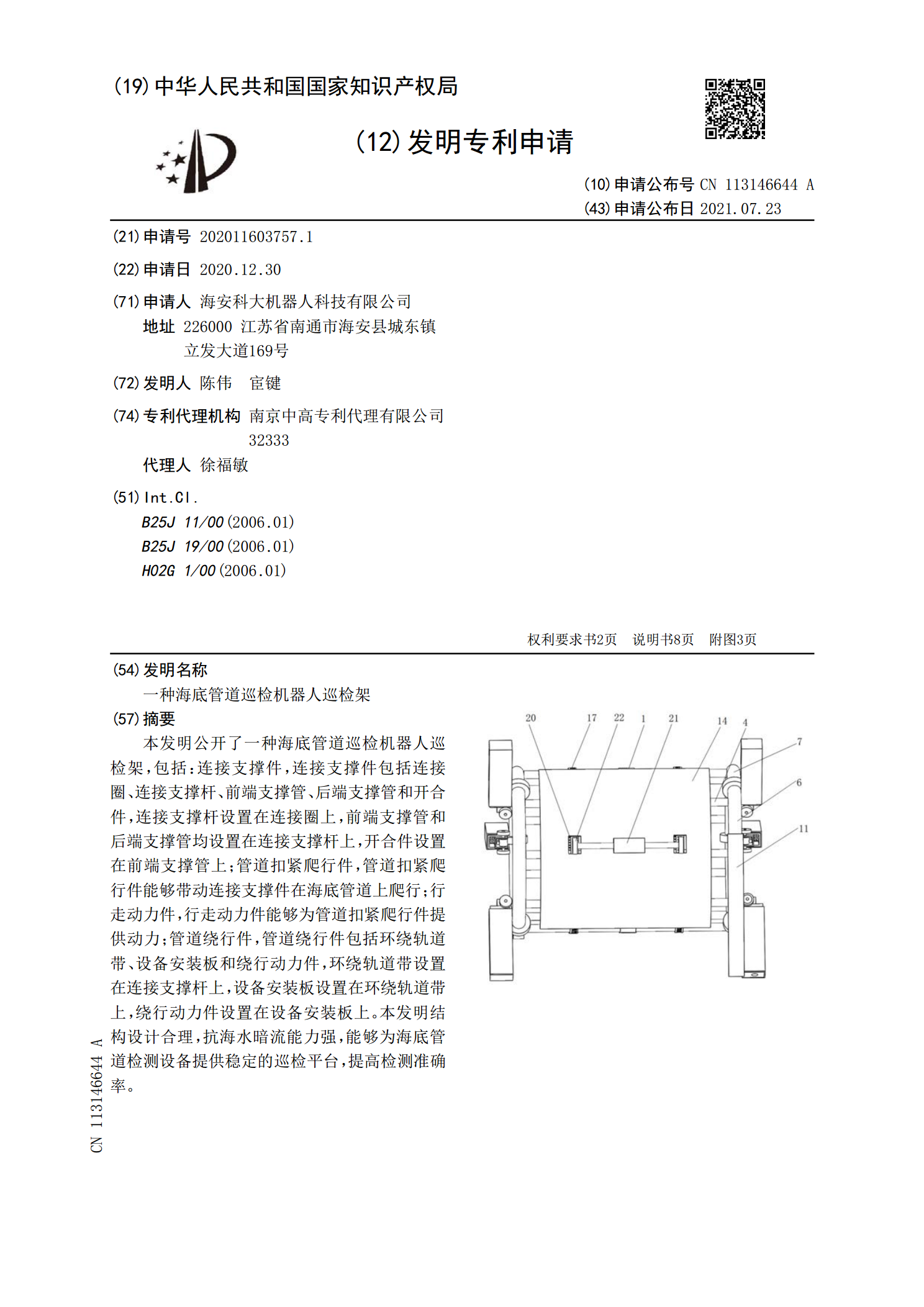
本发明公开了一种海底管道巡检机器人巡检架,包括:连接支撑件,连接支撑件包括连接圈、连接支撑杆、前端支撑管、后端支撑管和开合件,连接支撑杆设置在连接圈上,前端支撑管和后端支撑管均设置在连接支撑杆上,开合件设置在前端支撑管上;管道扣紧爬行件,管道扣紧爬行件能够带动连接支撑件在海底管道上爬行;行走动力件,行走动力件能够为管道扣紧爬行件提供动力;管道绕行件,管道绕行件包括环绕轨道带、设备安装板和绕行动力件,环绕轨道带设置在连接支撑杆上,设备安装板设置在环绕轨道带上,绕行动力件设置在设备安装板上。本发明结构设计合理