
电缆管道巡检机器人远程测控系统的研究与实现.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

电缆管道巡检机器人远程测控系统的研究与实现.docx
电缆管道巡检机器人远程测控系统的研究与实现电缆管道巡检机器人远程测控系统的研究与实现摘要:随着现代化建设的不断推进,电缆管道的建设与维护任务变得愈发重要。为了保证管道的安全运行和及时检修,远程测控系统在电缆管道巡检中发挥着重要作用。本文主要研究了电缆管道巡检机器人远程测控系统的设计、研究以及实现方法,并对其在电缆管道巡检中的应用进行了探讨。关键词:电缆管道、巡检机器人、远程测控系统、设计、研究、实现一、引言随着现代化社会的快速发展,电缆管道的建设和维护任务变得越来越重要。电缆管道巡检是保证电力系统运行安全
电缆管道巡检机器人.pdf
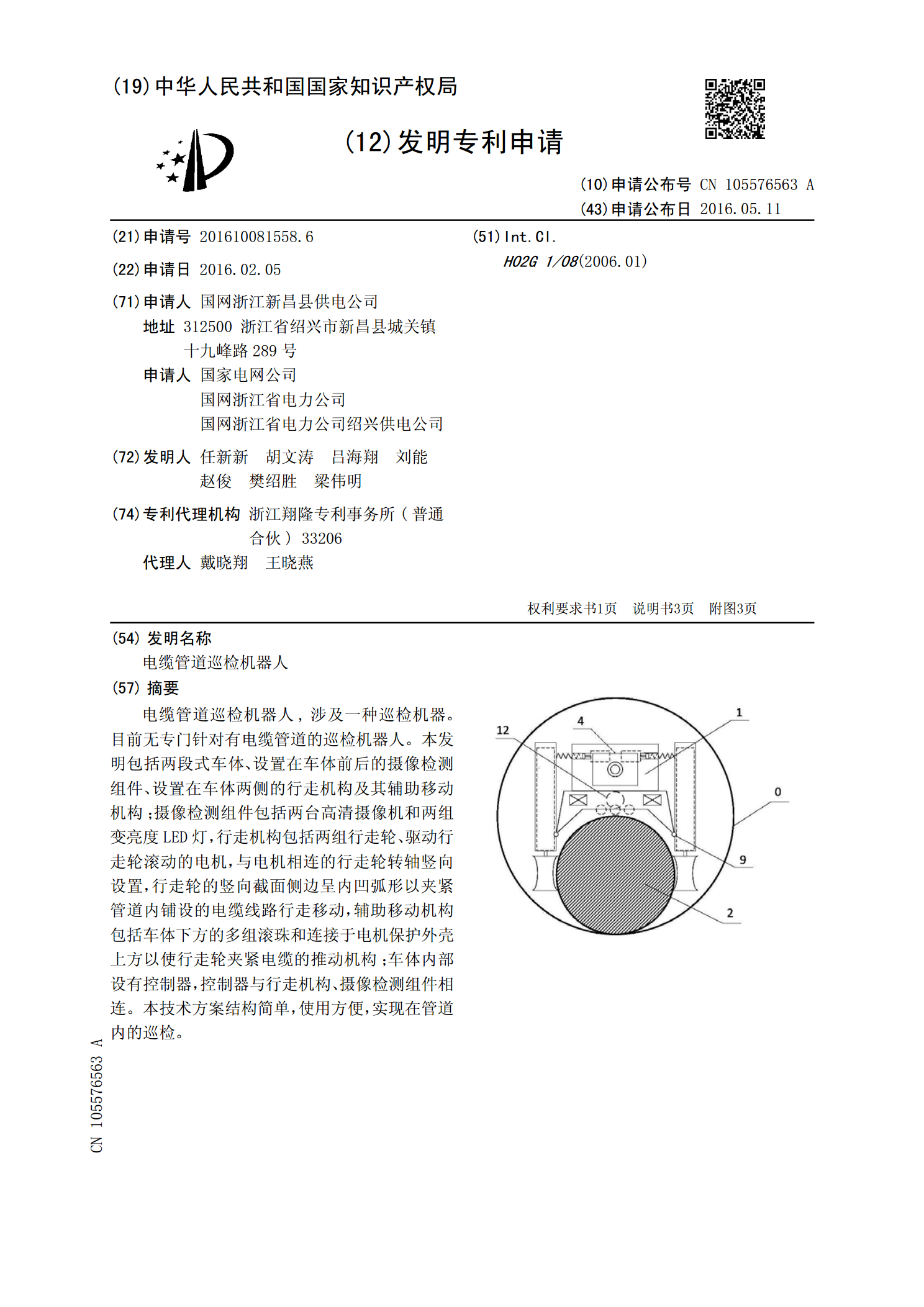
电缆管道巡检机器人,涉及一种巡检机器。目前无专门针对有电缆管道的巡检机器人。本发明包括两段式车体、设置在车体前后的摄像检测组件、设置在车体两侧的行走机构及其辅助移动机构;摄像检测组件包括两台高清摄像机和两组变亮度LED灯,行走机构包括两组行走轮、驱动行走轮滚动的电机,与电机相连的行走轮转轴竖向设置,行走轮的竖向截面侧边呈内凹弧形以夹紧管道内铺设的电缆线路行走移动,辅助移动机构包括车体下方的多组滚珠和连接于电机保护外壳上方以使行走轮夹紧电缆的推动机构;车体内部设有控制器,控制器与行走机构、摄像检测组件相连。

电缆隧道巡检机器人定位建图系统研究与实现.pptx
电缆隧道巡检机器人定位建图系统研究与实现目录添加章节标题电缆隧道巡检机器人定位建图系统概述定位技术原理建图技术原理系统组成与功能定位系统设计与实现定位传感器选择定位算法优化定位精度测试定位系统可靠性分析建图系统设计与实现地图数据采集与处理地图重建算法研究地图可视化技术实现地图精度与实时性评估系统应用与测试实际应用场景分析系统测试方案设计测试结果分析与评价系统性能优化建议结论与展望研究成果总结未来研究方向展望感谢观看

电缆隧道中巡检机器人实现及应用.docx
电缆隧道中巡检机器人实现及应用电缆隧道中巡检机器人的实现及应用摘要:电缆隧道作为电力传输和通信网络的关键组成部分,对于保障城市的正常运转和人民的生活质量有着重要的作用。但由于电缆隧道通常位于地下深处,巡检工作存在一定的难度和风险。本论文将探讨电缆隧道中巡检机器人的实现方法以及其在实际应用中的意义。一、引言电缆隧道是将电缆集中敷设的通道,用于保护电缆及其附件。在城市中,电缆隧道经常位于地下深处,巡检人员需要长时间地下工作,不仅工作量大,而且存在一定的安全隐患。因此,引入巡检机器人可以有效解决这些问题。二、电

电缆隧道中巡检机器人实现及应用.pptx
电缆隧道中巡检机器人的实现及应用目录添加章节标题电缆隧道巡检机器人的技术实现机器人硬件组成机器人导航系统机器人传感器技术机器人控制系统电缆隧道巡检机器人的应用场景电力行业应用铁路及地铁隧道应用城市地下管道应用矿井隧道应用电缆隧道巡检机器人的优势与挑战提高巡检效率与精度降低人工巡检成本应对复杂环境的能力技术成熟度与推广难度电缆隧道巡检机器人的未来发展技术创新方向应用领域拓展智能化与自主化发展政策支持与产业发展感谢观看