
仿人机器人两自由度混联高频机械足.pdf

努力****凌芹


1/5

2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
仿人机器人两自由度混联高频机械足.pdf
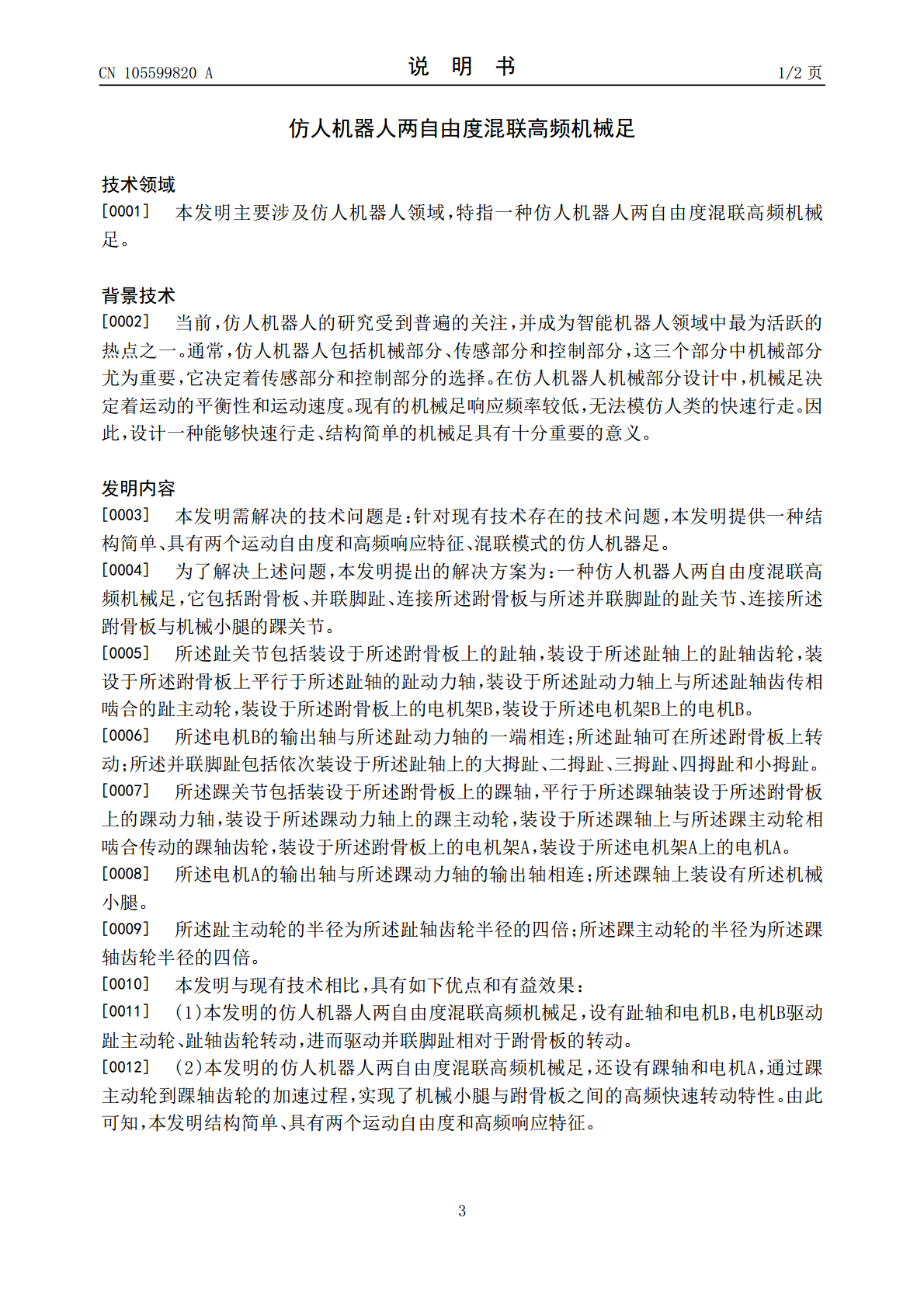
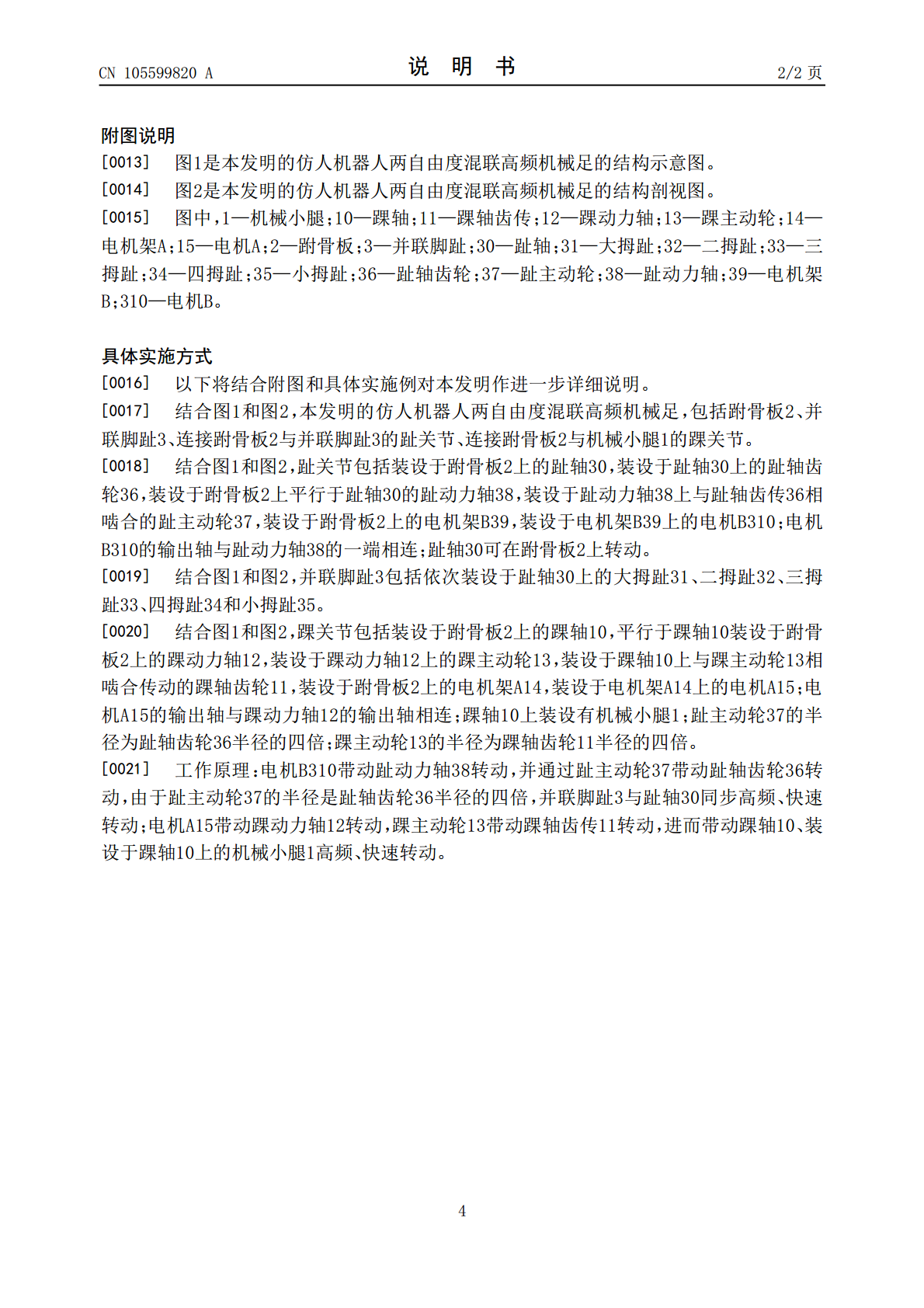
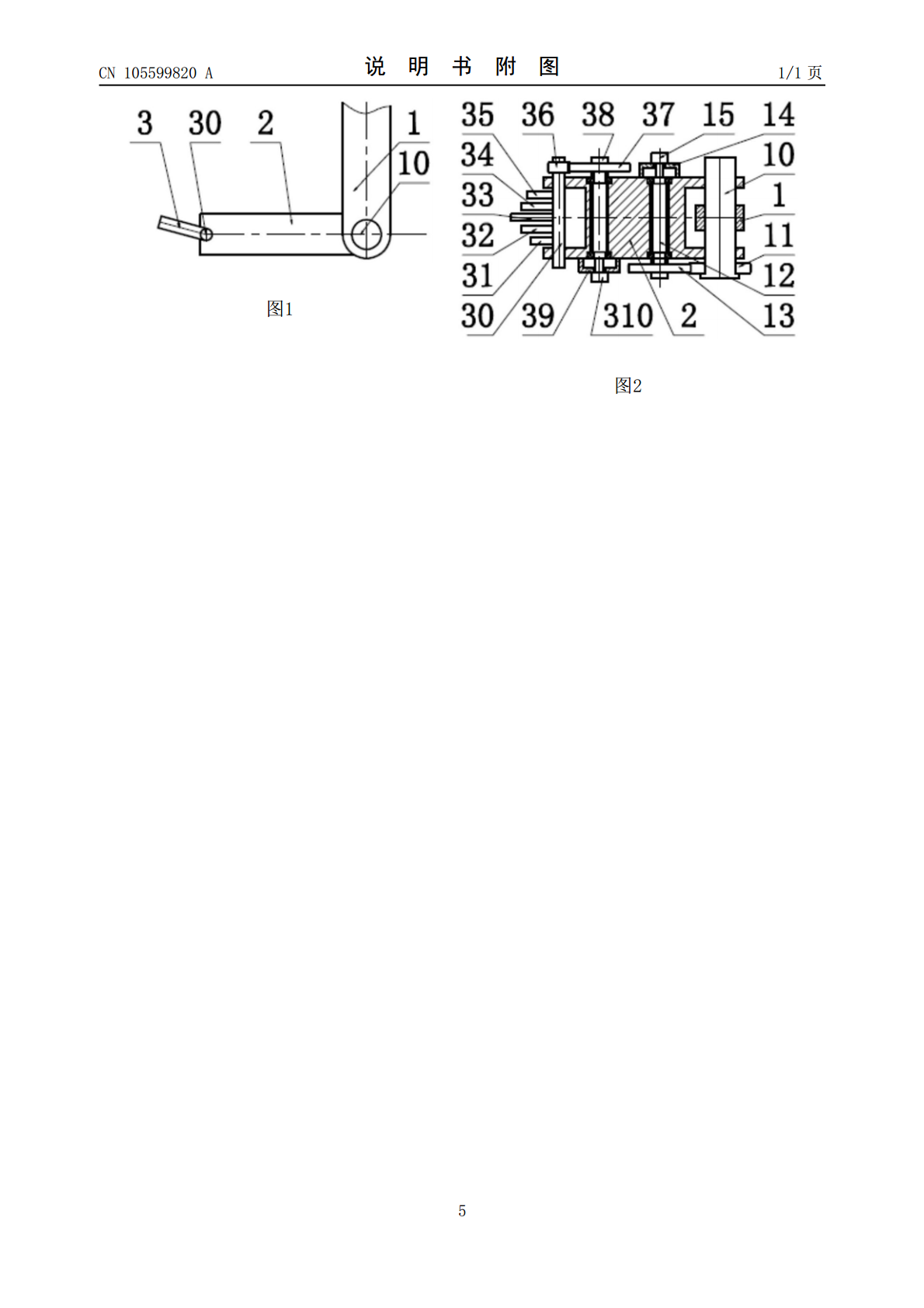
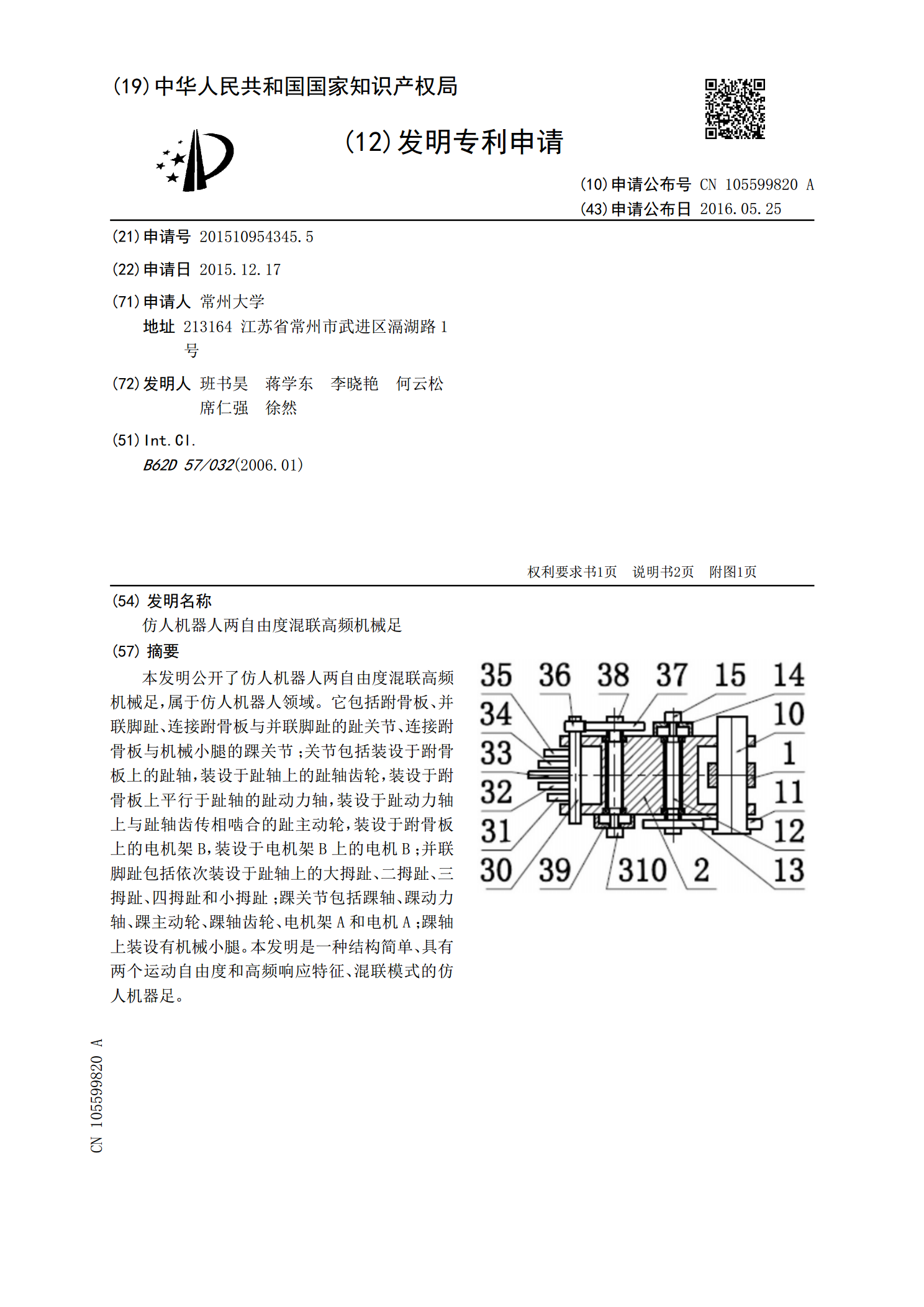
本发明公开了仿人机器人两自由度混联高频机械足,属于仿人机器人领域。它包括跗骨板、并联脚趾、连接跗骨板与并联脚趾的趾关节、连接跗骨板与机械小腿的踝关节;关节包括装设于跗骨板上的趾轴,装设于趾轴上的趾轴齿轮,装设于跗骨板上平行于趾轴的趾动力轴,装设于趾动力轴上与趾轴齿传相啮合的趾主动轮,装设于跗骨板上的电机架B,装设于电机架B上的电机B;并联脚趾包括依次装设于趾轴上的大拇趾、二拇趾、三拇趾、四拇趾和小拇趾;踝关节包括踝轴、踝动力轴、踝主动轮、踝轴齿轮、电机架A和电机A;踝轴上装设有机械小腿。本发明是一种结构简

仿人机器人两自由度混联抗冲击机械足.pdf
本发明公开了一种仿人机器人两自由度混联抗冲击机械足,属于仿人机器人领域。它包括跖骨板,装设于跖骨板上的踝轴和趾轴,装设于踝轴上的踝轴齿轮,与踝轴齿轮相啮合的踝动力轴,输出轴与踝动力轴相连的踝电机,装设于趾轴上的并联脚趾和趾轴齿轮,与趾轴齿轮相啮合的趾动力轮,其输出轴与趾动力轮相连的趾电机,连接机械小腿与跖骨板的小腿弹簧,连接并联脚趾与跖骨板的脚趾弹簧;踝轴齿轮与机械小腿相固结,趾轴齿轮与并联脚趾相固结;踝轴可在跖骨板上自由转动,趾轴可在跖骨板上自由转动。本发明是一种结构简单、具有两个运动自由度和抗冲击性能

仿人机器人两自由度混联减振机械足.pdf
本发明公开了仿人机器人两自由度混联减振机械足,属于仿人机器人领域。它包括跗骨板、踝轴、趾轴、并联脚趾、小腿弹簧、脚趾弹簧、趾关节动力装置和踝关节动力装置;踝轴可在跗骨板上自由转动,趾轴可在跗骨板上自由转动;并联脚趾包括装设于趾轴上的大拇趾、二拇趾、三拇趾、四拇趾和小拇趾;趾关节动力装置包括第二电机架、第二电机、趾轴蜗轮、第二蜗杆架A、第二蜗杆架B和第二蜗杆;踝关节动力装置包括踝轴蜗轮、第一蜗杆架A、第一蜗杆架B、第一电机架、第一电机和第一蜗杆。本发明是一种结构简单、具有两个运动自由度和减振功能、混联模式的
仿人机器人四自由度混联高频机械足.pdf
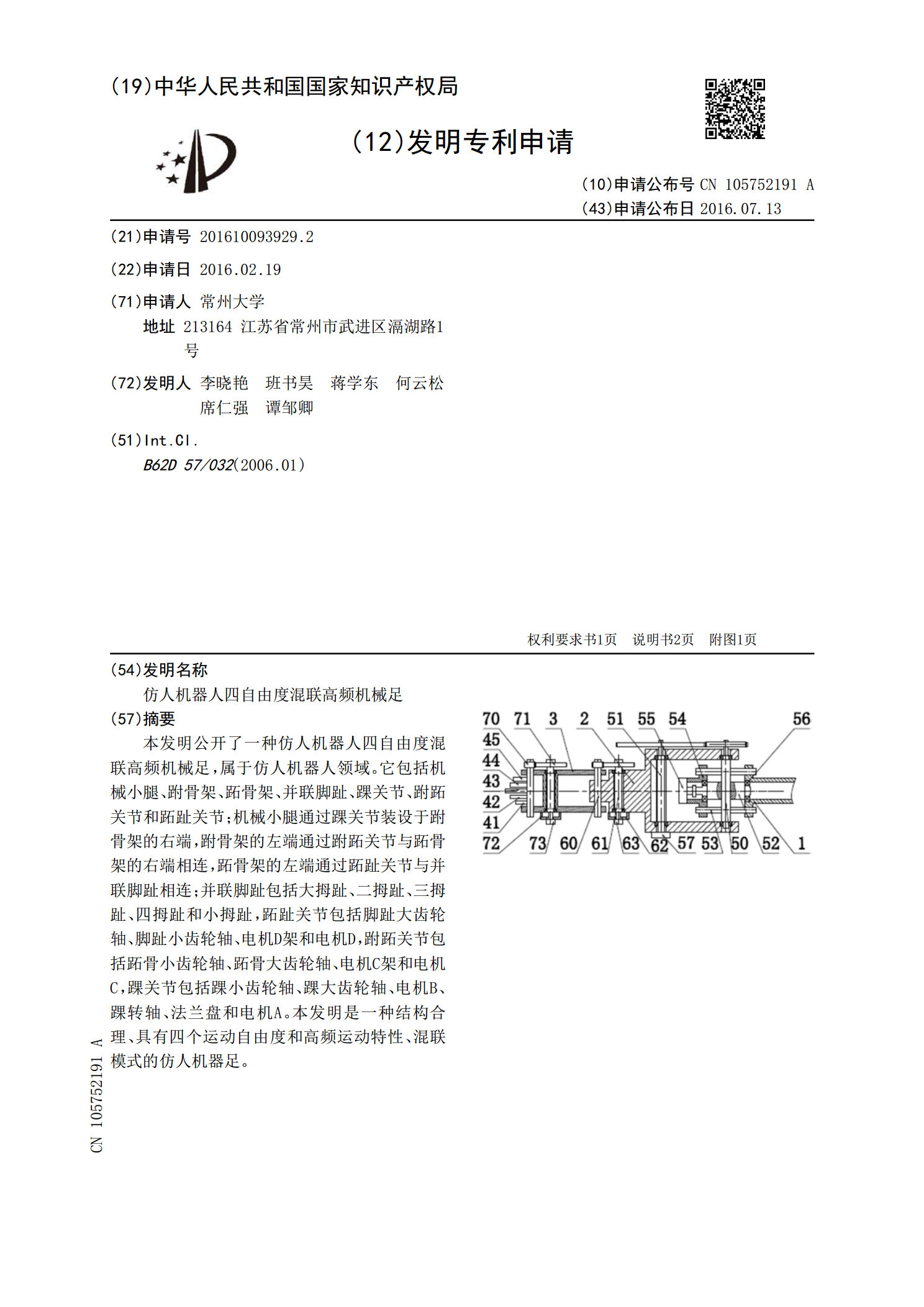
本发明公开了一种仿人机器人四自由度混联高频机械足,属于仿人机器人领域。它包括机械小腿、跗骨架、跖骨架、并联脚趾、踝关节、跗跖关节和跖趾关节;机械小腿通过踝关节装设于跗骨架的右端,跗骨架的左端通过跗跖关节与跖骨架的右端相连,跖骨架的左端通过跖趾关节与并联脚趾相连;并联脚趾包括大拇趾、二拇趾、三拇趾、四拇趾和小拇趾,跖趾关节包括脚趾大齿轮轴、脚趾小齿轮轴、电机D架和电机D,跗跖关节包括跖骨小齿轮轴、跖骨大齿轮轴、电机C架和电机C,踝关节包括踝小齿轮轴、踝大齿轮轴、电机B、踝转轴、法兰盘和电机A。本发明是一种结
混联高频仿人三自由度机械足.pdf
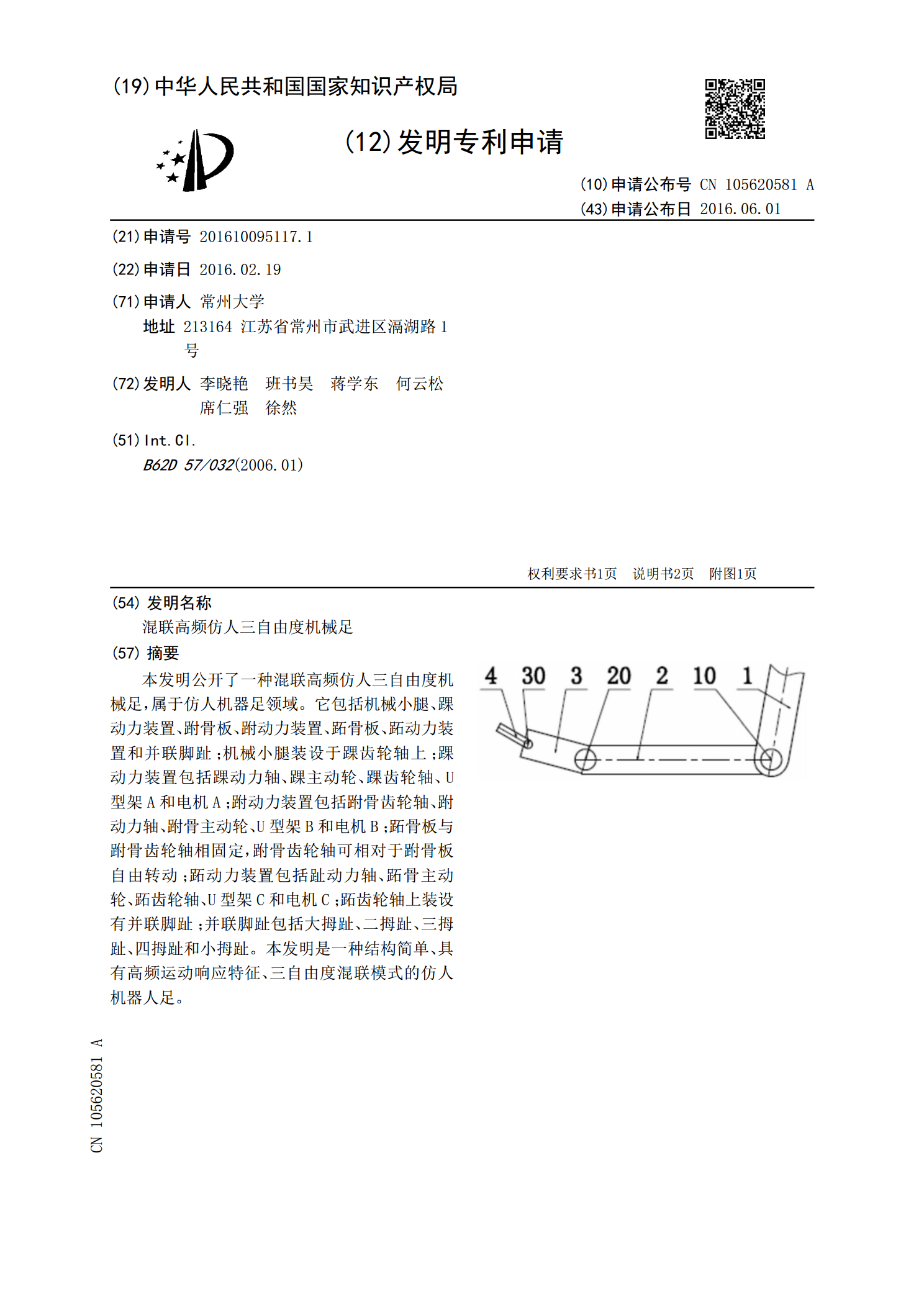
本发明公开了一种混联高频仿人三自由度机械足,属于仿人机器足领域。它包括机械小腿、踝动力装置、跗骨板、跗动力装置、跖骨板、跖动力装置和并联脚趾;机械小腿装设于踝齿轮轴上;踝动力装置包括踝动力轴、踝主动轮、踝齿轮轴、U型架A和电机A;跗动力装置包括跗骨齿轮轴、跗动力轴、跗骨主动轮、U型架B和电机B;跖骨板与跗骨齿轮轴相固定,跗骨齿轮轴可相对于跗骨板自由转动;跖动力装置包括趾动力轴、跖骨主动轮、跖齿轮轴、U型架C和电机C;跖齿轮轴上装设有并联脚趾;并联脚趾包括大拇趾、二拇趾、三拇趾、四拇趾和小拇趾。本发明是一种