
一种四轮轮毂电机电动车自适应巡航控制系统及方法.pdf

一条****ee


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种四轮轮毂电机电动车自适应巡航控制系统及方法.pdf
本发明公开了一种四轮轮毂电机电动车自适应巡航控制系统,包括:本发明以四轮轮毂电机电动车为研究对象,进行自适应巡航控制(ACC)研究,提出了考虑理论安全距离与实际距离之差、两车相对速度的模式切换控制方法,该控制方法将ACC分为跟随前车模式、定速巡航模式和匀速行驶模式,设计了包括理论安全距离算法、驱动力矩控制算法、制动力矩控制算法的自适应巡航控制器,通过再生制动对制动能量进行回收,并基于驾驶模拟器实验台设计典型工况对控制策略进行实验验证。本发明公开了一种四轮轮毂电机电动车自适应巡航控制方法。本发明具有操作安全
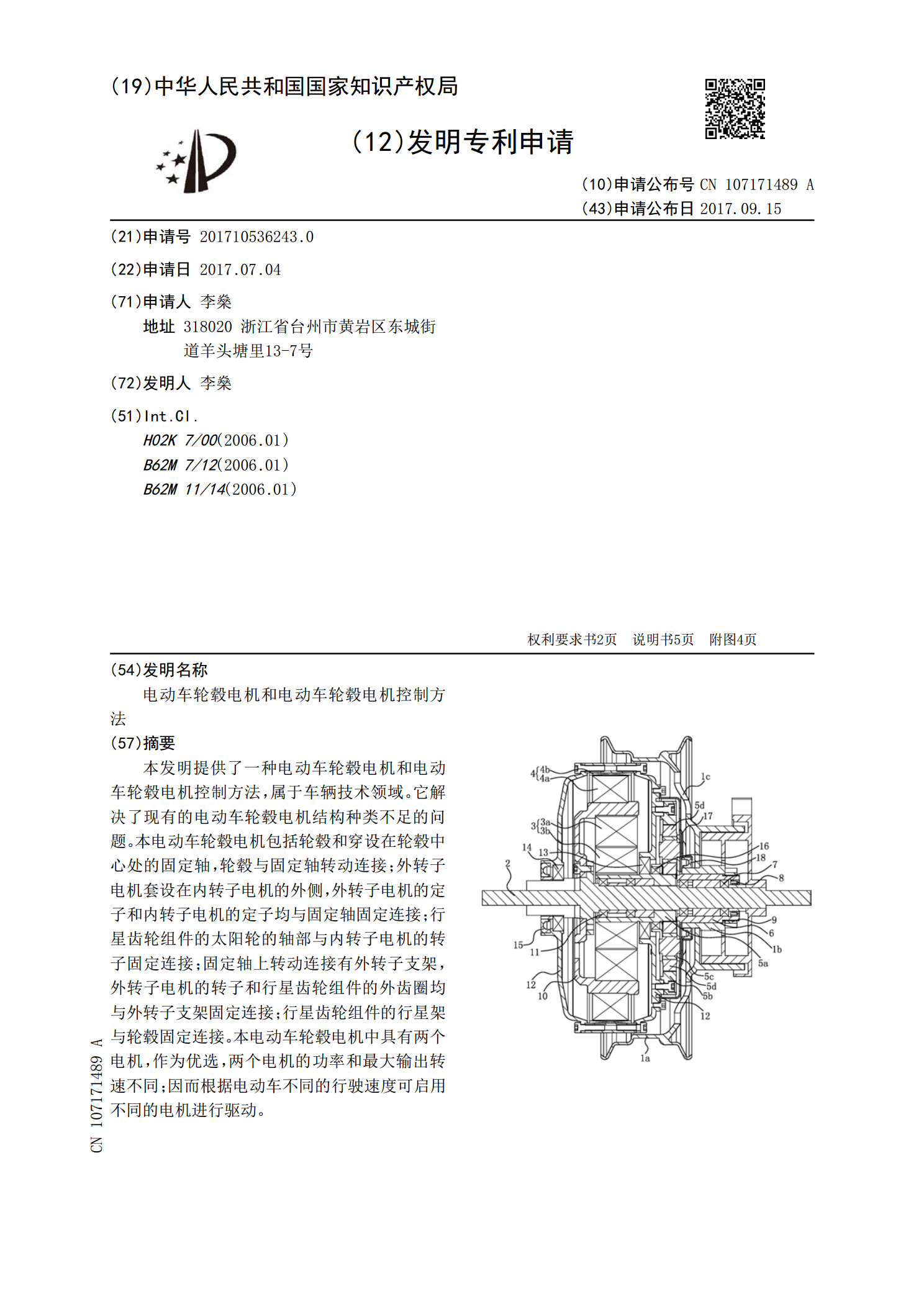
电动车轮毂电机和电动车轮毂电机控制方法.pdf
本发明提供了一种电动车轮毂电机和电动车轮毂电机控制方法,属于车辆技术领域。它解决了现有的电动车轮毂电机结构种类不足的问题。本电动车轮毂电机包括轮毂和穿设在轮毂中心处的固定轴,轮毂与固定轴转动连接;外转子电机套设在内转子电机的外侧,外转子电机的定子和内转子电机的定子均与固定轴固定连接;行星齿轮组件的太阳轮的轴部与内转子电机的转子固定连接;固定轴上转动连接有外转子支架,外转子电机的转子和行星齿轮组件的外齿圈均与外转子支架固定连接;行星齿轮组件的行星架与轮毂固定连接。本电动车轮毂电机中具有两个电机,作为优选,两
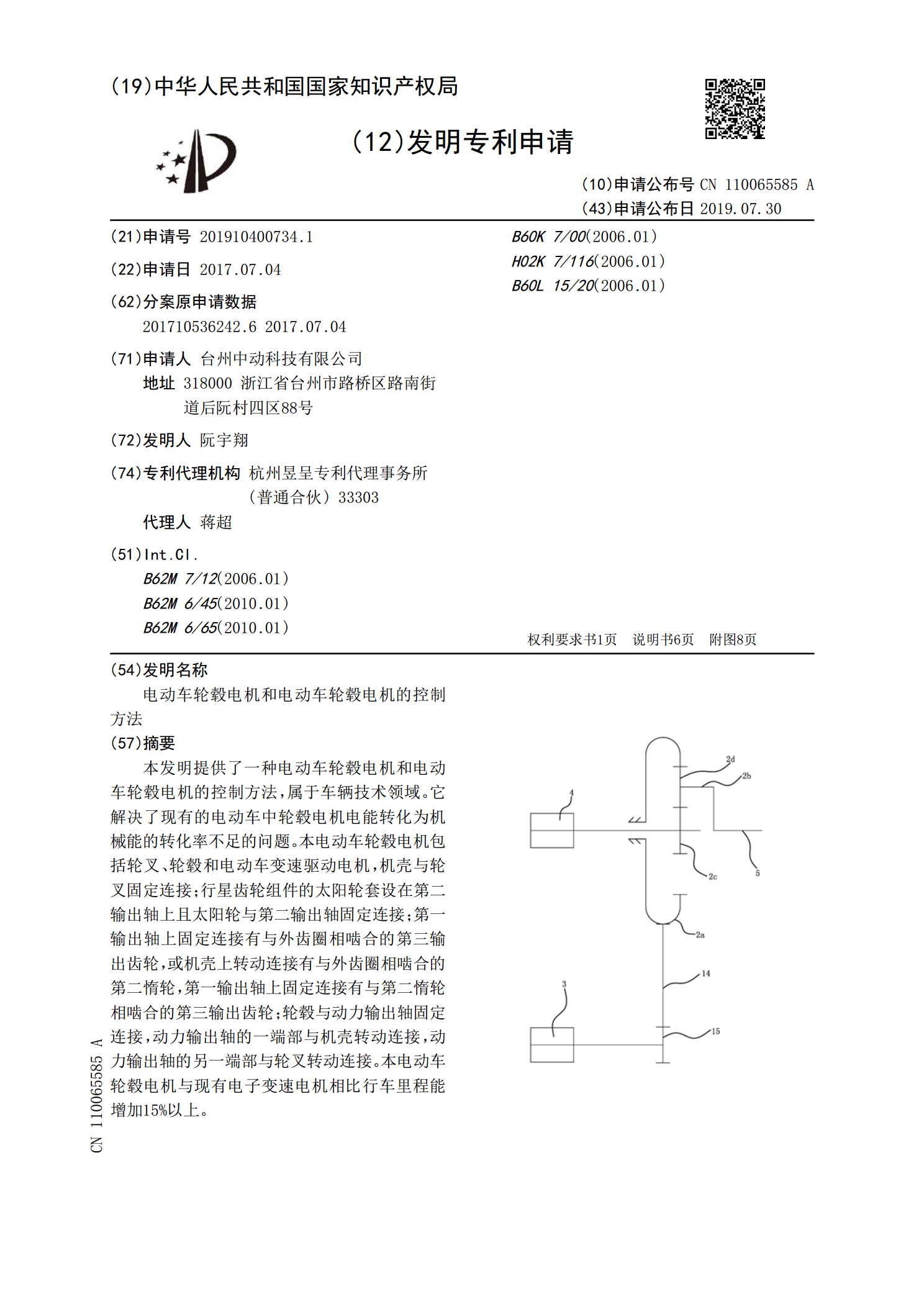
电动车轮毂电机和电动车轮毂电机的控制方法.pdf
本发明提供了一种电动车轮毂电机和电动车轮毂电机的控制方法,属于车辆技术领域。它解决了现有的电动车中轮毂电机电能转化为机械能的转化率不足的问题。本电动车轮毂电机包括轮叉、轮毂和电动车变速驱动电机,机壳与轮叉固定连接;行星齿轮组件的太阳轮套设在第二输出轴上且太阳轮与第二输出轴固定连接;第一输出轴上固定连接有与外齿圈相啮合的第三输出齿轮,或机壳上转动连接有与外齿圈相啮合的第二惰轮,第一输出轴上固定连接有与第二惰轮相啮合的第三输出齿轮;轮毂与动力输出轴固定连接,动力输出轴的一端部与机壳转动连接,动力输出轴的另一端
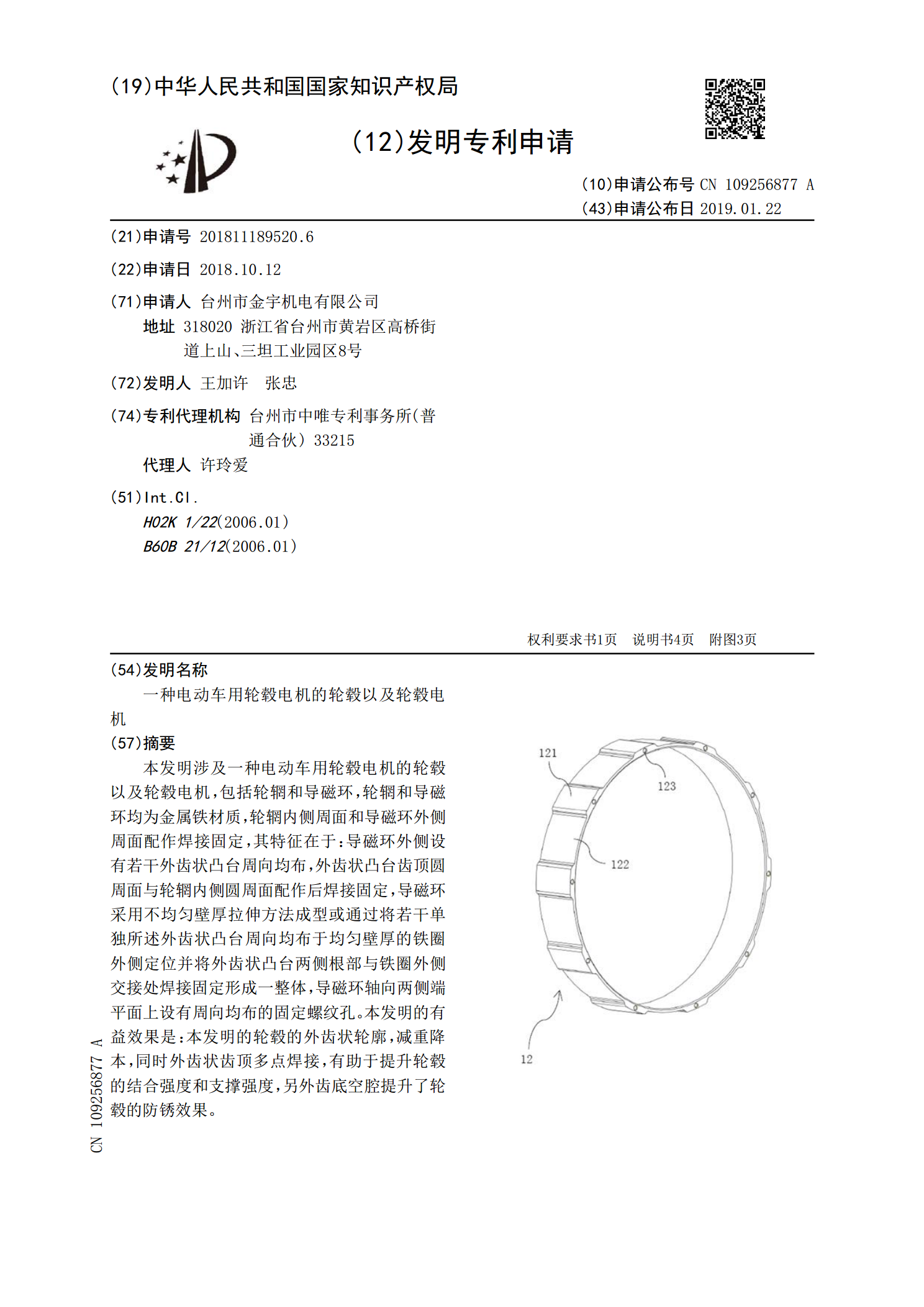
一种电动车用轮毂电机的轮毂以及轮毂电机.pdf
本发明涉及一种电动车用轮毂电机的轮毂以及轮毂电机,包括轮辋和导磁环,轮辋和导磁环均为金属铁材质,轮辋内侧周面和导磁环外侧周面配作焊接固定,其特征在于:导磁环外侧设有若干外齿状凸台周向均布,外齿状凸台齿顶圆周面与轮辋内侧圆周面配作后焊接固定,导磁环采用不均匀壁厚拉伸方法成型或通过将若干单独所述外齿状凸台周向均布于均匀壁厚的铁圈外侧定位并将外齿状凸台两侧根部与铁圈外侧交接处焊接固定形成一整体,导磁环轴向两侧端平面上设有周向均布的固定螺纹孔。本发明的有益效果是:本发明的轮毂的外齿状轮廓,减重降本,同时外齿状齿顶
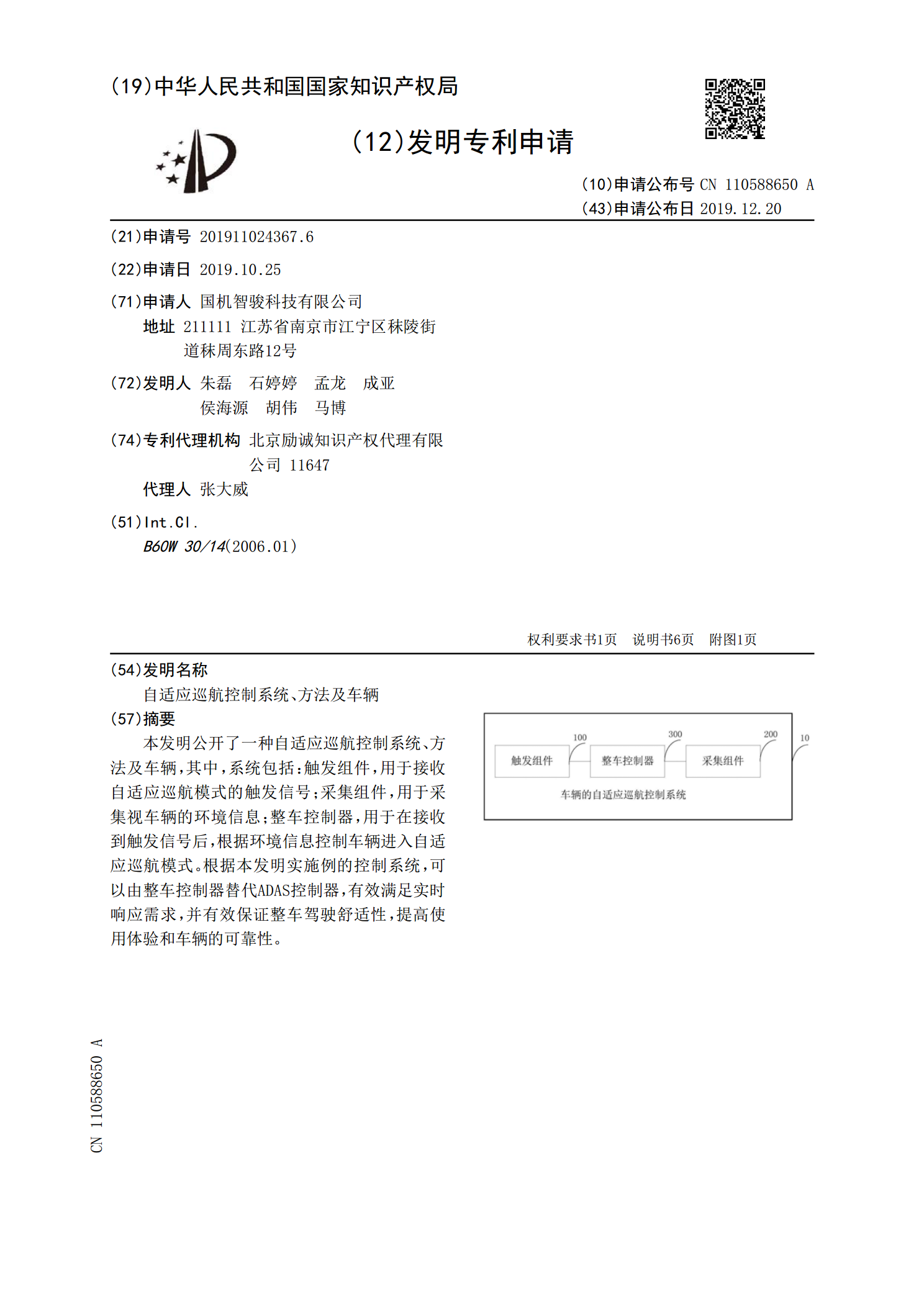
自适应巡航控制系统、方法及车辆.pdf
本发明公开了一种自适应巡航控制系统、方法及车辆,其中,系统包括:触发组件,用于接收自适应巡航模式的触发信号;采集组件,用于采集视车辆的环境信息;整车控制器,用于在接收到触发信号后,根据环境信息控制车辆进入自适应巡航模式。根据本发明实施例的控制系统,可以由整车控制器替代ADAS控制器,有效满足实时响应需求,并有效保证整车驾驶舒适性,提高使用体验和车辆的可靠性。