
用于外骨骼机器人的柔性驱动结构.pdf

雨巷****怡轩

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于外骨骼机器人的柔性驱动结构.pdf
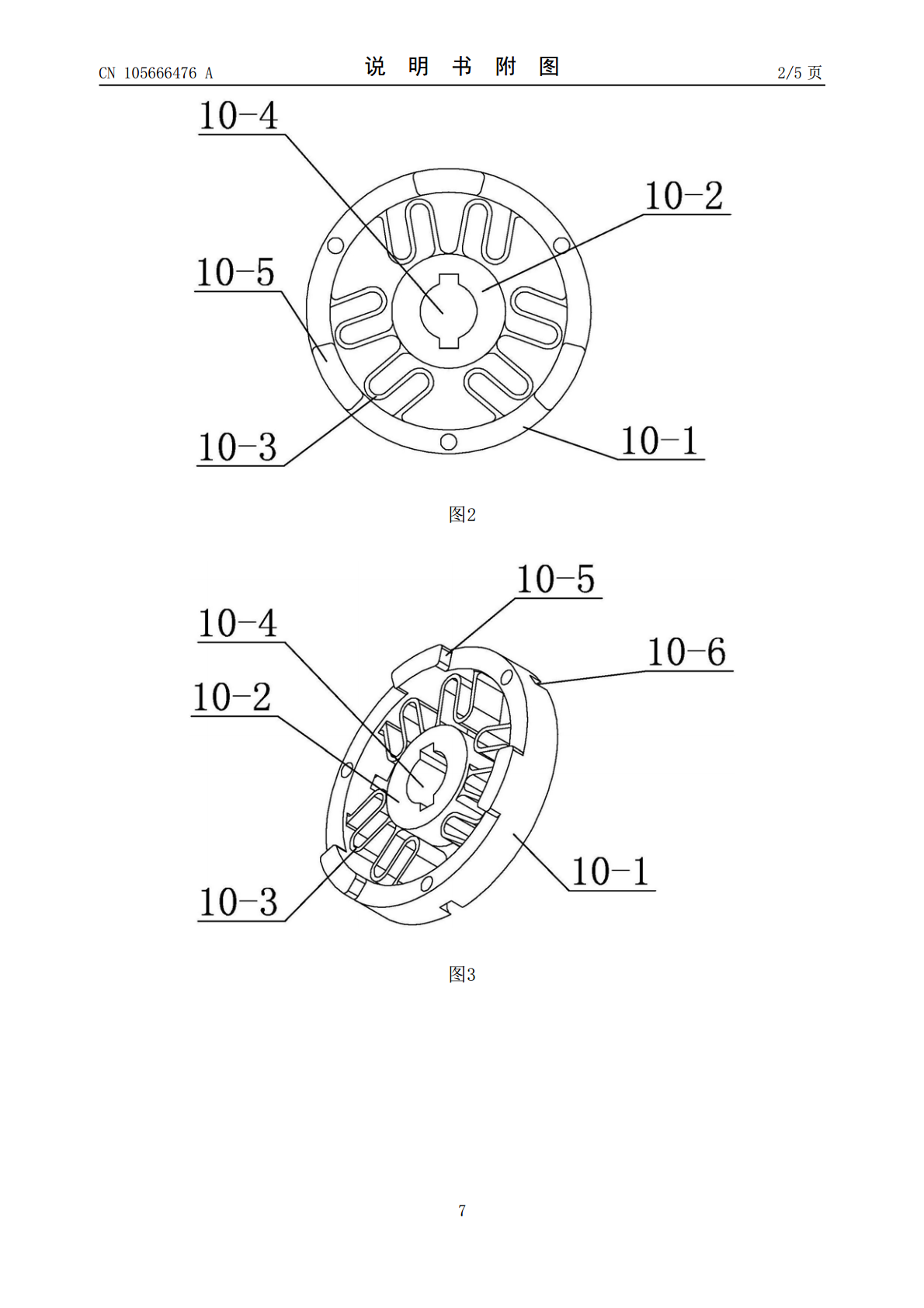
用于外骨骼机器人的柔性驱动结构,它涉及一种柔性驱动机构。目前外骨骼机器人系统多以刚性机构进行动力输出,但作为需要与人类直接接触的关节驱动器,柔顺性差,不能满足人机互动机器人对安全性及舒适性的要求。本发明中第一锥齿轮位于骨骼杆接头一和骨骼杆接头二之间围合的空腔内且第一锥齿轮套装在电机的输出轴上,离轴式磁编码器设在第一转轴的另一端上,第二转轴位于骨骼杆接头二的另一侧且其依次穿设在骨骼杆接头一和骨骼杆接头二上,弹性体套装在第一转轴上且其位于骨骼杆接头一和骨骼杆接头二之间,第二锥齿轮位于骨骼杆接头一和骨骼杆接头二
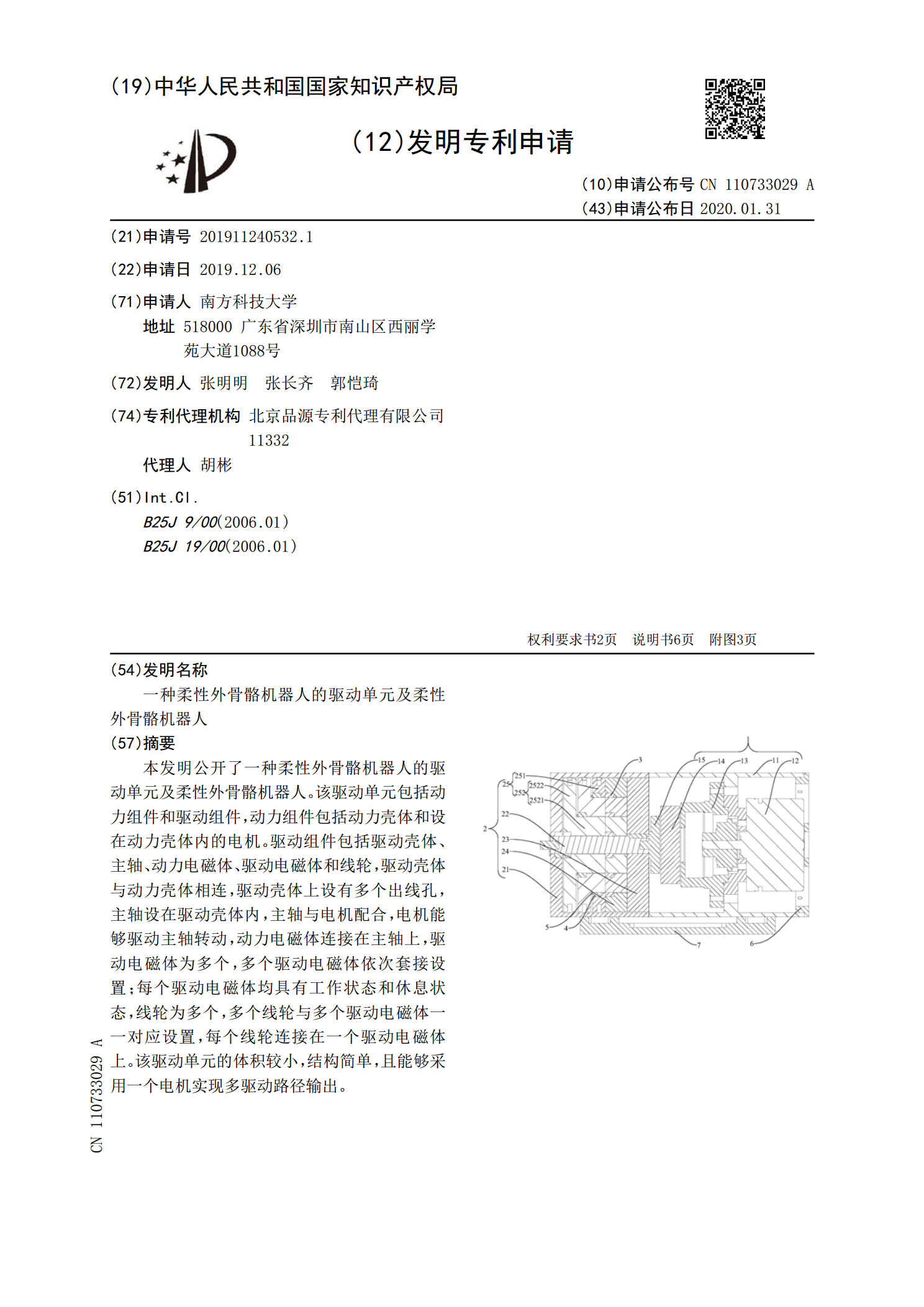
一种柔性外骨骼机器人的驱动单元及柔性外骨骼机器人.pdf
本发明公开了一种柔性外骨骼机器人的驱动单元及柔性外骨骼机器人。该驱动单元包括动力组件和驱动组件,动力组件包括动力壳体和设在动力壳体内的电机。驱动组件包括驱动壳体、主轴、动力电磁体、驱动电磁体和线轮,驱动壳体与动力壳体相连,驱动壳体上设有多个出线孔,主轴设在驱动壳体内,主轴与电机配合,电机能够驱动主轴转动,动力电磁体连接在主轴上,驱动电磁体为多个,多个驱动电磁体依次套接设置;每个驱动电磁体均具有工作状态和休息状态,线轮为多个,多个线轮与多个驱动电磁体一一对应设置,每个线轮连接在一个驱动电磁体上。该驱动单元的
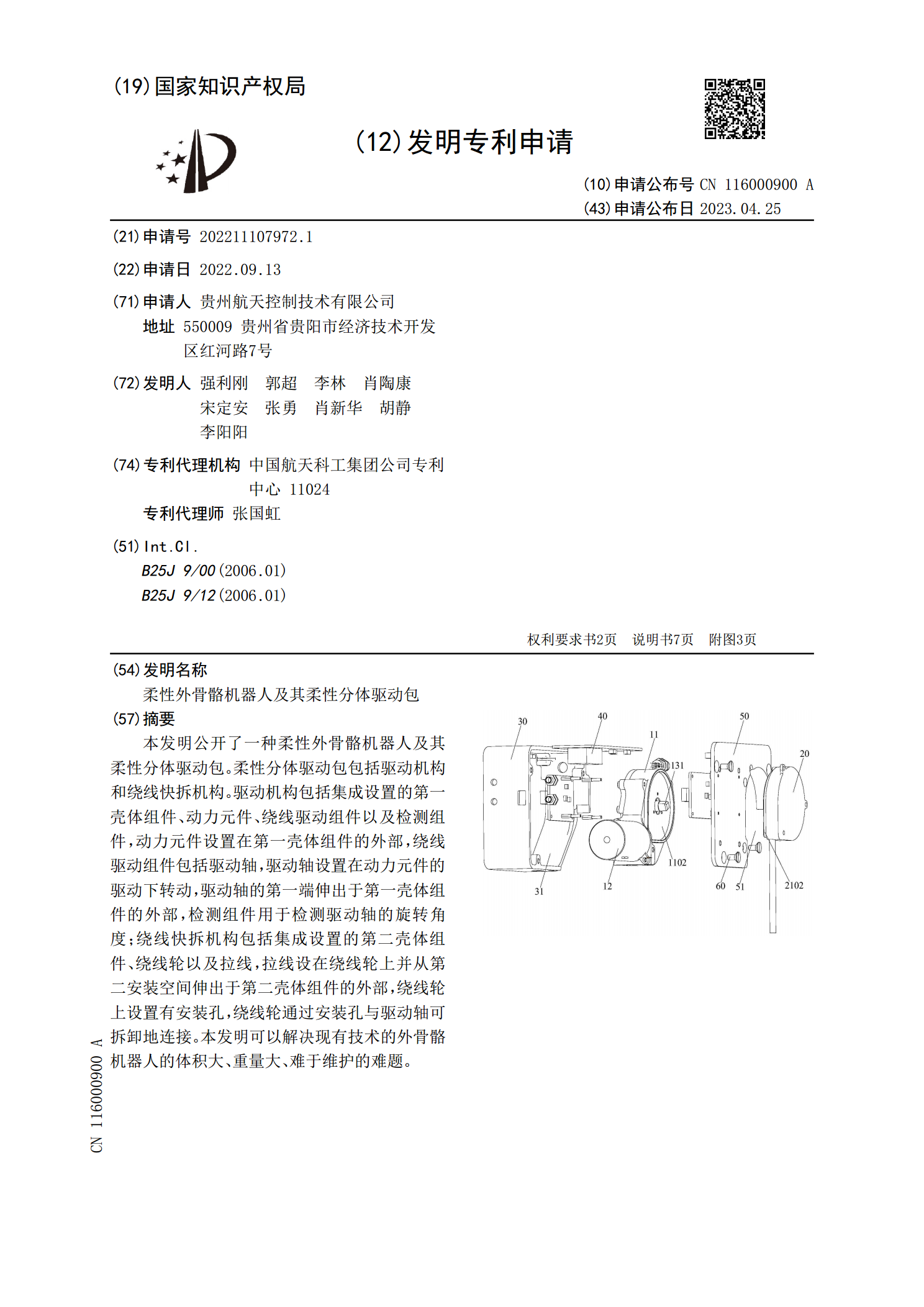
柔性外骨骼机器人及其柔性分体驱动包.pdf
本发明公开了一种柔性外骨骼机器人及其柔性分体驱动包。柔性分体驱动包包括驱动机构和绕线快拆机构。驱动机构包括集成设置的第一壳体组件、动力元件、绕线驱动组件以及检测组件,动力元件设置在第一壳体组件的外部,绕线驱动组件包括驱动轴,驱动轴设置在动力元件的驱动下转动,驱动轴的第一端伸出于第一壳体组件的外部,检测组件用于检测驱动轴的旋转角度;绕线快拆机构包括集成设置的第二壳体组件、绕线轮以及拉线,拉线设在绕线轮上并从第二安装空间伸出于第二壳体组件的外部,绕线轮上设置有安装孔,绕线轮通过安装孔与驱动轴可拆卸地连接。本发

一种用于神经康复的柔性驱动手掌外骨骼机器人.pdf
本发明属于医疗器械技术领域,具体涉及一种用于神经康复的柔性驱动手掌外骨骼机器人。本发明包括小臂支架、手掌组件、拇指组件、第一手指组件、小指组件以及柔性驱动组件;柔性驱动组件包括安装在柔性驱动电机、第一光轴、第二光轴、扭簧、第一锥齿轮、第二锥齿轮、齿轮轴、主动传动组件以及四个从动传动组件,主动传动组件和从动传动组件的输出端均固定连接一驱动绳的一端,五个驱动绳的另一端分别连接至拇指组件、三个第一手指组件和小指组件上;柔性驱动电机的转轴上安装有第一编码器,齿轮轴上安装有第二编码器。本发明通过驱动绳驱动能够帮助患
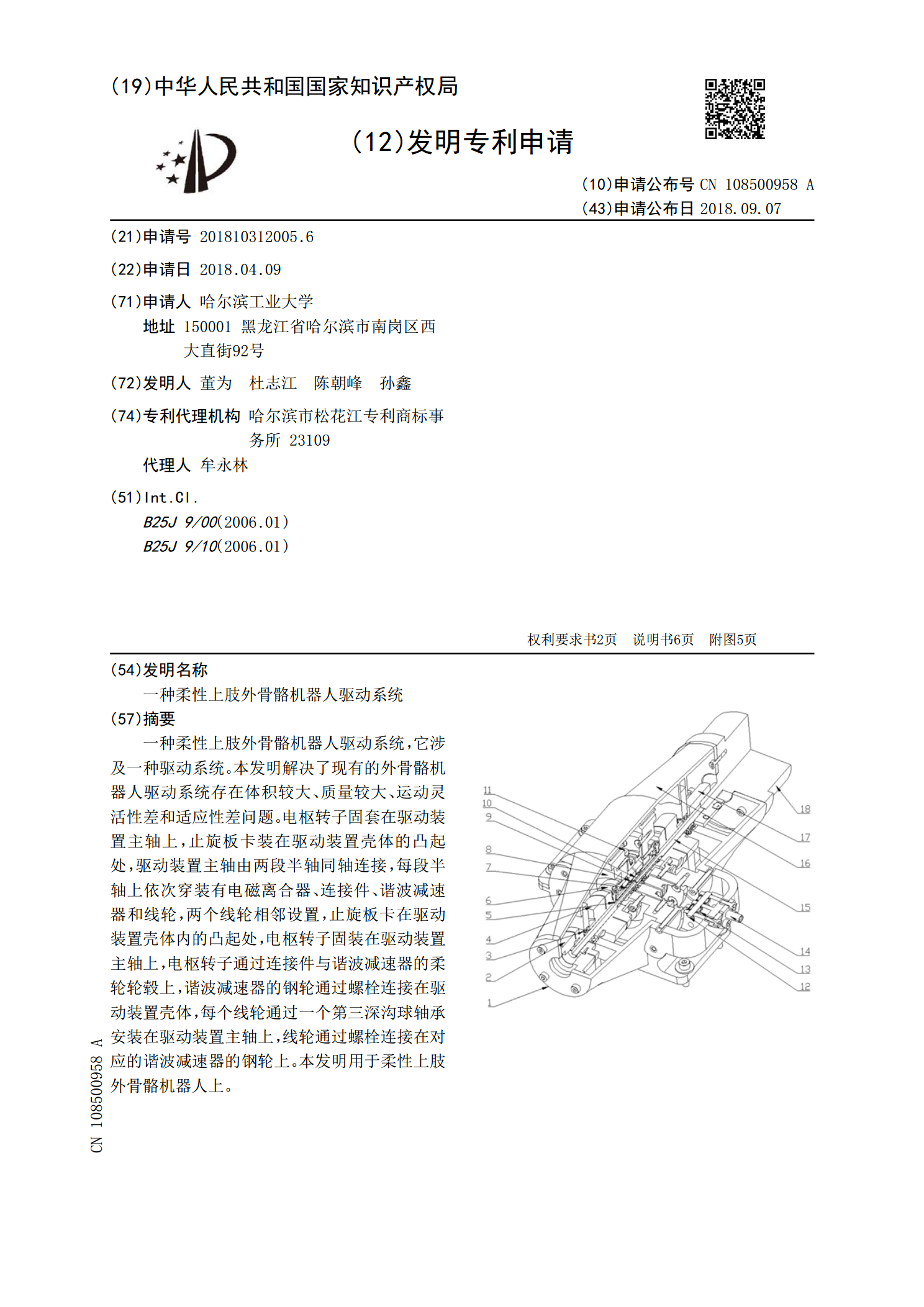
一种柔性上肢外骨骼机器人驱动系统.pdf
一种柔性上肢外骨骼机器人驱动系统,它涉及一种驱动系统。本发明解决了现有的外骨骼机器人驱动系统存在体积较大、质量较大、运动灵活性差和适应性差问题。电枢转子固套在驱动装置主轴上,止旋板卡装在驱动装置壳体的凸起处,驱动装置主轴由两段半轴同轴连接,每段半轴上依次穿装有电磁离合器、连接件、谐波减速器和线轮,两个线轮相邻设置,止旋板卡在驱动装置壳体内的凸起处,电枢转子固装在驱动装置主轴上,电枢转子通过连接件与谐波减速器的柔轮轮毂上,谐波减速器的钢轮通过螺栓连接在驱动装置壳体,每个线轮通过一个第三深沟球轴承安装在驱动装