
一种用于移动机器人的独立转向驱动轮.pdf

新槐****公主

1/7

2/7

3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于移动机器人的独立转向驱动轮.pdf
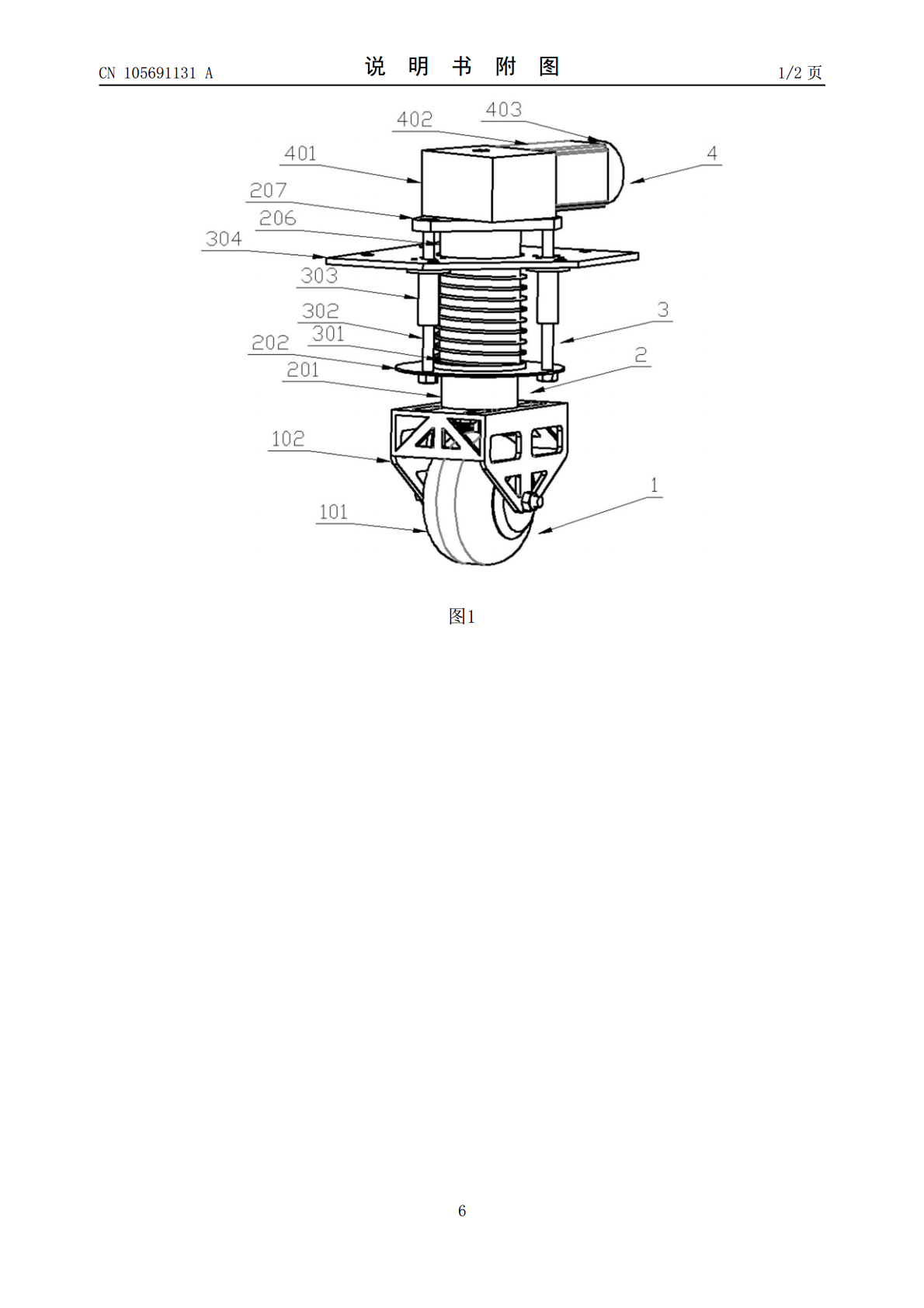
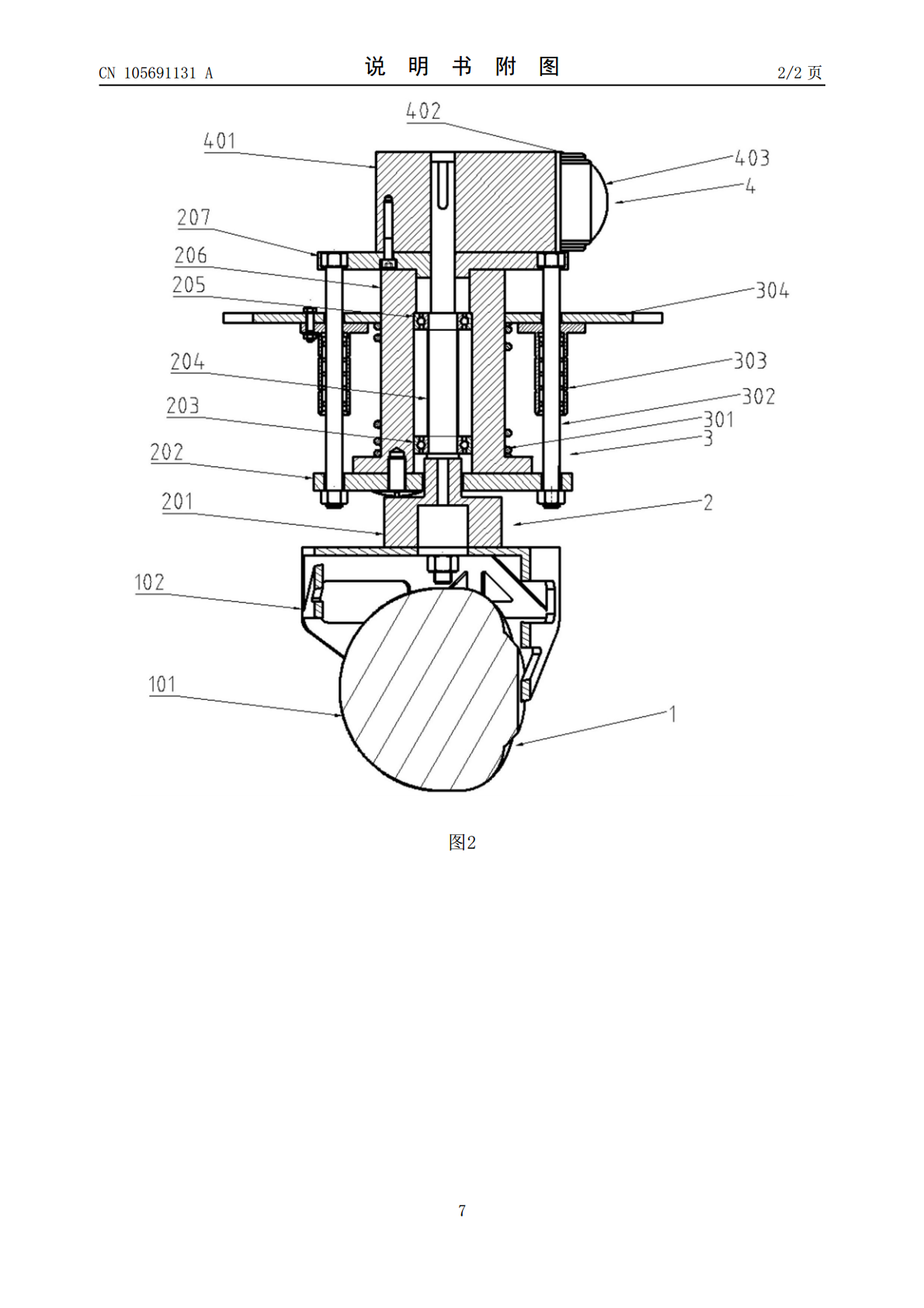
本发明公开了一种用于移动机器人的独立转向驱动轮,包括有轮毂电机,轮架,中空轴等。轮毂电机上安装有轮架,轮架上安装有中空轴,所述中空轴内部中空用于电机走线;所述的中空轴上同轴安装有下法兰盘,下法兰盘上同轴安装有轴承座,轴承座内部同轴安装了两个角接触轴承;所述下法兰盘上以中空轴为中心均布安装有3根光轴,3根光轴贯穿中法兰盘,并与上法兰盘固定;所述轴承座外边缘同轴安装有弹簧,弹簧的一端嵌在中法兰盘的下面,一端顶在下法兰盘的上面;所述上法兰盘上安装有转向机构;所述的转向机构包括:蜗轮蜗杆减速箱、步进电机、光电编码
一种基于轮毂电机的独立转向驱动轮.pdf
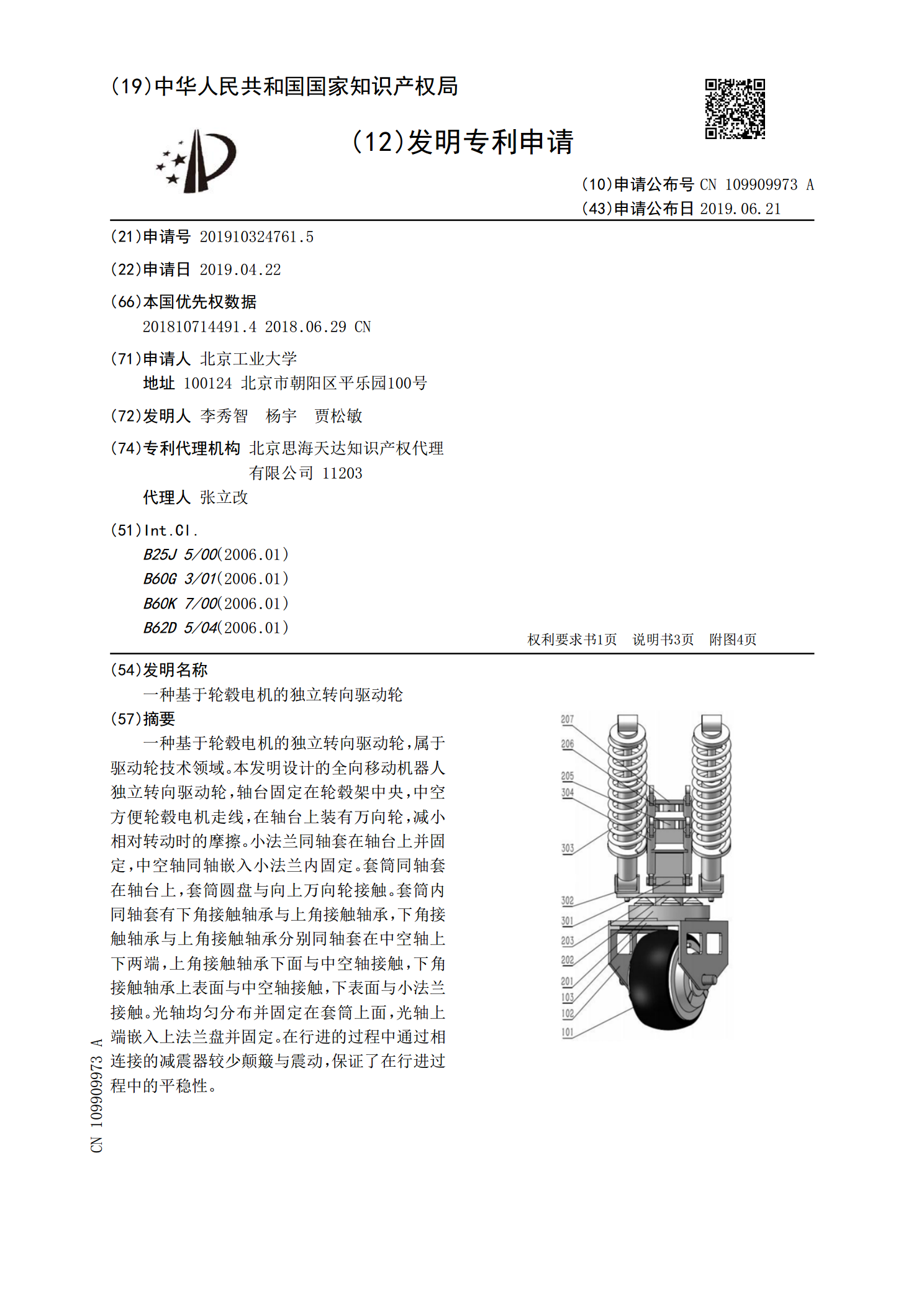
一种基于轮毂电机的独立转向驱动轮,属于驱动轮技术领域。本发明设计的全向移动机器人独立转向驱动轮,轴台固定在轮毂架中央,中空方便轮毂电机走线,在轴台上装有万向轮,减小相对转动时的摩擦。小法兰同轴套在轴台上并固定,中空轴同轴嵌入小法兰内固定。套筒同轴套在轴台上,套筒圆盘与向上万向轮接触。套筒内同轴套有下角接触轴承与上角接触轴承,下角接触轴承与上角接触轴承分别同轴套在中空轴上下两端,上角接触轴承下面与中空轴接触,下角接触轴承上表面与中空轴接触,下表面与小法兰接触。光轴均匀分布并固定在套筒上面,光轴上端嵌入上法兰
一种基于轮毂电机的独立转向驱动轮.pdf
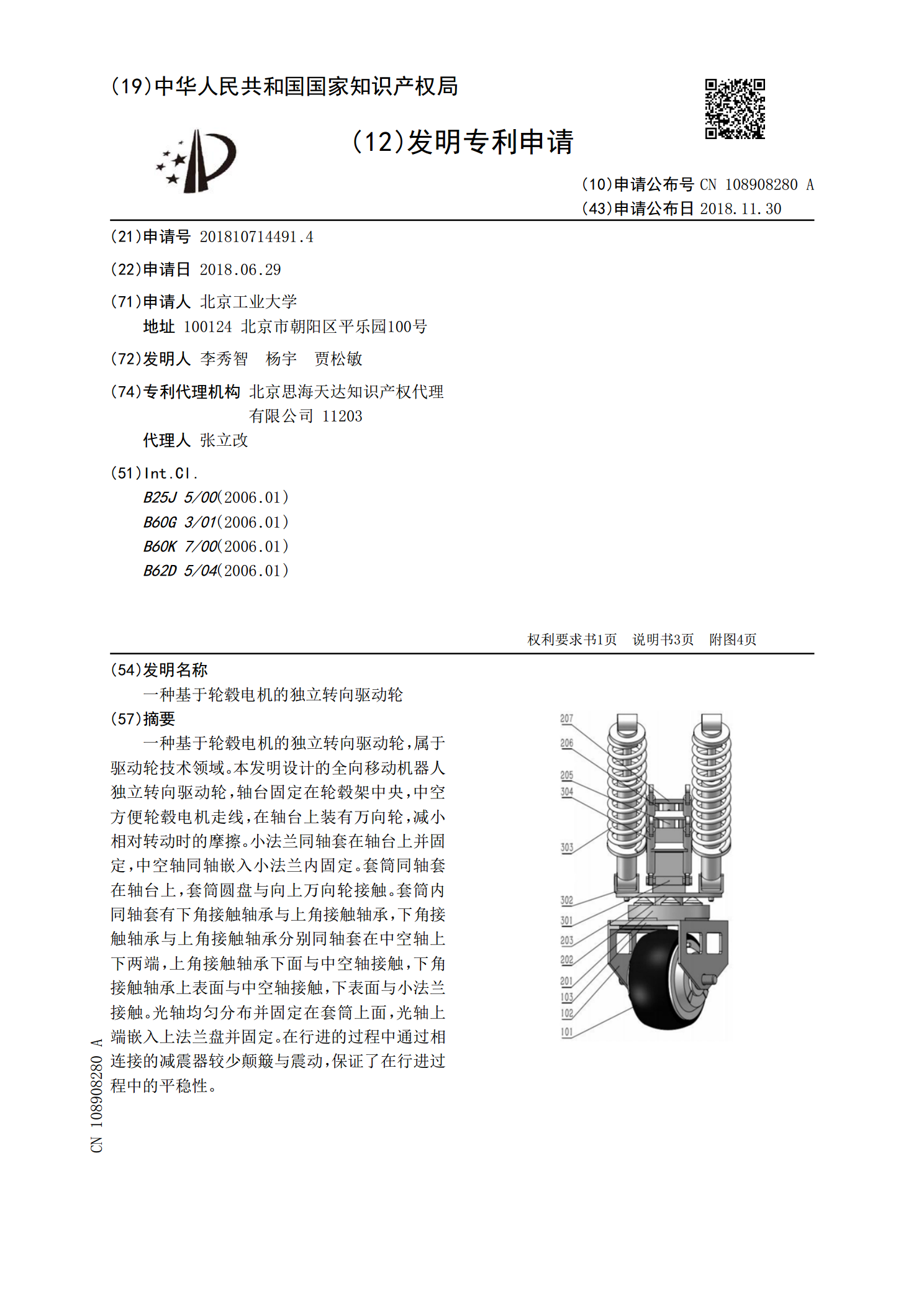
一种基于轮毂电机的独立转向驱动轮,属于驱动轮技术领域。本发明设计的全向移动机器人独立转向驱动轮,轴台固定在轮毂架中央,中空方便轮毂电机走线,在轴台上装有万向轮,减小相对转动时的摩擦。小法兰同轴套在轴台上并固定,中空轴同轴嵌入小法兰内固定。套筒同轴套在轴台上,套筒圆盘与向上万向轮接触。套筒内同轴套有下角接触轴承与上角接触轴承,下角接触轴承与上角接触轴承分别同轴套在中空轴上下两端,上角接触轴承下面与中空轴接触,下角接触轴承上表面与中空轴接触,下表面与小法兰接触。光轴均匀分布并固定在套筒上面,光轴上端嵌入上法兰

一种转向驱动轮.pdf
本发明涉及一种转向驱动轮,属于电动汽车领域。包括不等长双横臂悬架、驱动电机、转向电机、万向传动轴、蜗轮蜗杆减速器、小锥齿轮、传动锥齿轮、大锥齿轮、制动钳及车轮,其中驱动电机和转向电机均固结于车架上,驱动电机通过万向传动轴及齿轮传动驱动车轮转动,转向电机通过万向传动轴及蜗轮蜗杆减速器实现车轮转向。当汽车转向时,通过合理控制驱动电机的转速可实现驱动系统和转向系统相互独立的运作。本发明在实现实现车轮大角度转向和驱动的同时,又减轻了车轮的非簧载质量,提高了汽车的灵活性及行驶平顺性。
一种用于重载搬运小车的主动独立转向装置.pdf
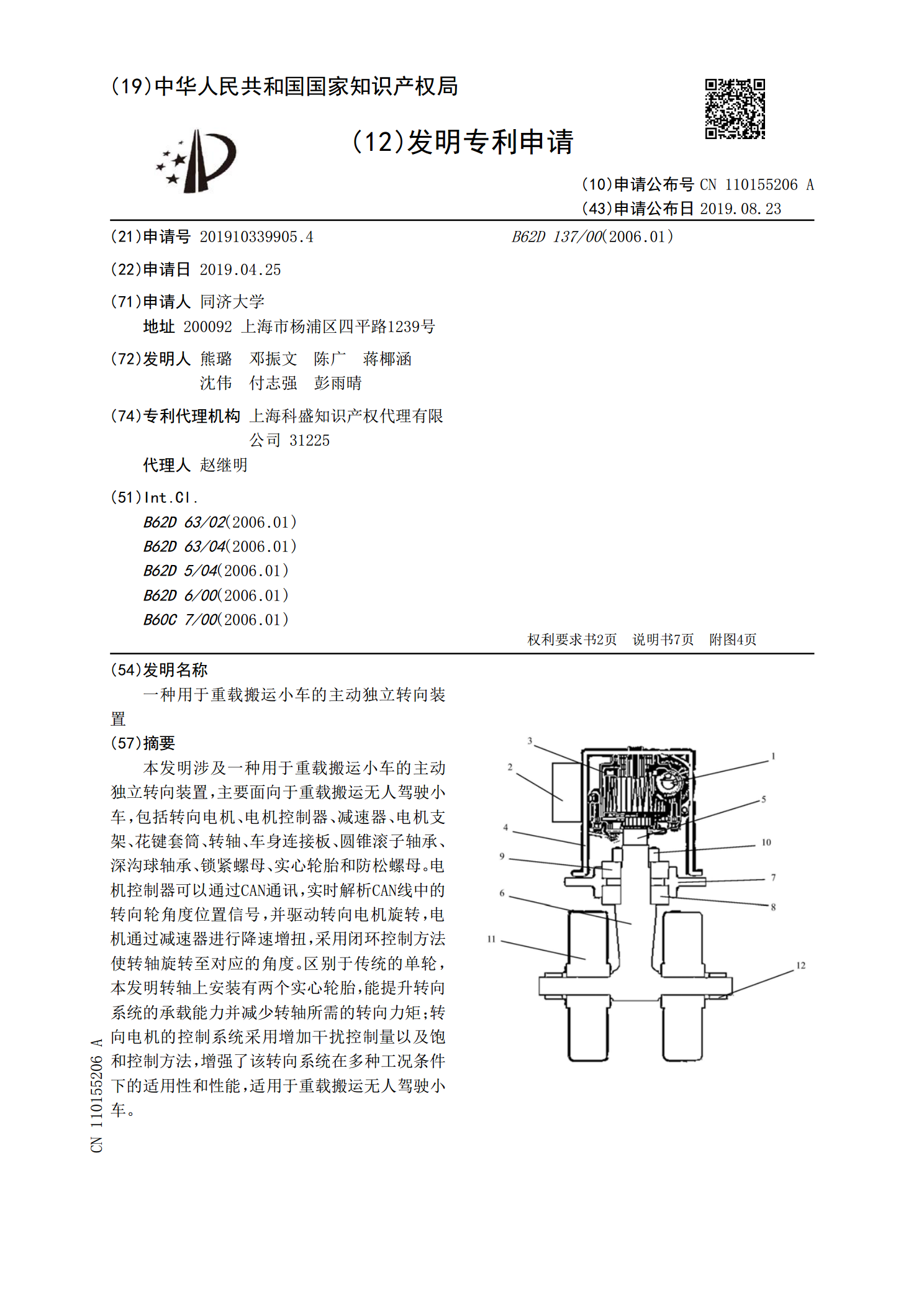
本发明涉及一种用于重载搬运小车的主动独立转向装置,主要面向于重载搬运无人驾驶小车,包括转向电机、电机控制器、减速器、电机支架、花键套筒、转轴、车身连接板、圆锥滚子轴承、深沟球轴承、锁紧螺母、实心轮胎和防松螺母。电机控制器可以通过CAN通讯,实时解析CAN线中的转向轮角度位置信号,并驱动转向电机旋转,电机通过减速器进行降速增扭,采用闭环控制方法使转轴旋转至对应的角度。区别于传统的单轮,本发明转轴上安装有两个实心轮胎,能提升转向系统的承载能力并减少转轴所需的转向力矩;转向电机的控制系统采用增加干扰控制量以及饱