
一种用于重载搬运小车的主动独立转向装置.pdf

邻家****ng


1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于重载搬运小车的主动独立转向装置.pdf
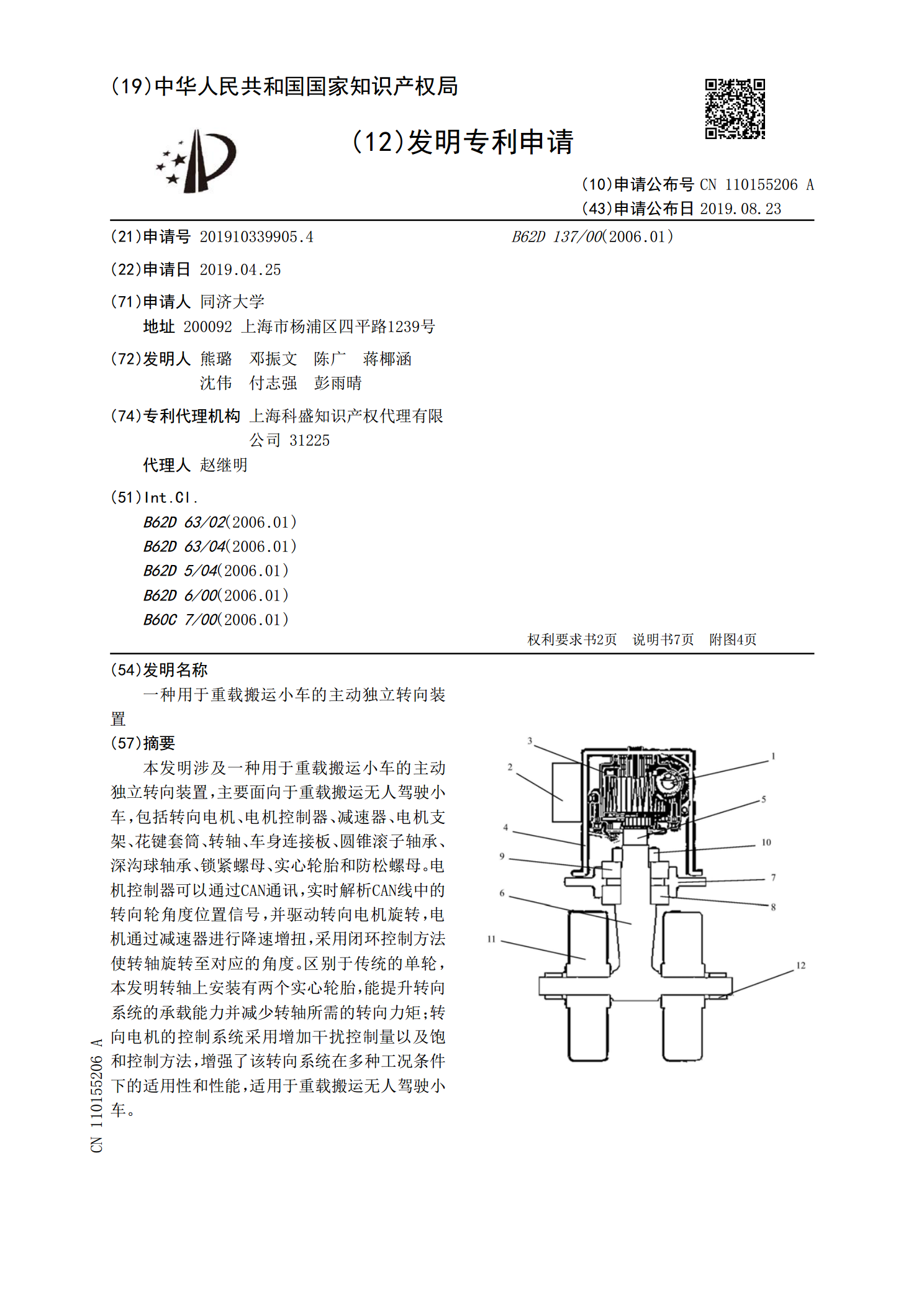
本发明涉及一种用于重载搬运小车的主动独立转向装置,主要面向于重载搬运无人驾驶小车,包括转向电机、电机控制器、减速器、电机支架、花键套筒、转轴、车身连接板、圆锥滚子轴承、深沟球轴承、锁紧螺母、实心轮胎和防松螺母。电机控制器可以通过CAN通讯,实时解析CAN线中的转向轮角度位置信号,并驱动转向电机旋转,电机通过减速器进行降速增扭,采用闭环控制方法使转轴旋转至对应的角度。区别于传统的单轮,本发明转轴上安装有两个实心轮胎,能提升转向系统的承载能力并减少转轴所需的转向力矩;转向电机的控制系统采用增加干扰控制量以及饱

一种应用于智能搬运小车的顶升装置.pdf
本发明涉具体涉及一种应用于智能搬运小车的顶升装置,解决现有的顶升装置顶升时梳齿架受力不平衡,易发生偏载,不易实现车辆的平稳起降的问题。顶升装置包括内框架、外框架、动力电机、传动长轴、两个传动组件和多个导向组件;动力电机与传动长轴连接,传动长轴的两端分别设置有传动组件和导向组件,传动组件包括传动短轴、伞齿轮一、伞齿轮二、圆柱直齿轮和齿条;伞齿轮一设置在传动长轴的两端,伞齿轮二设置在传动短轴上并与伞齿轮一配合转动;传动短轴的两端分别设置有圆柱直齿轮,齿条固定设置在外框架上。本发明实现了顶升装置对称受力,无侧方
一种用于搬运玻璃的减震小车.pdf
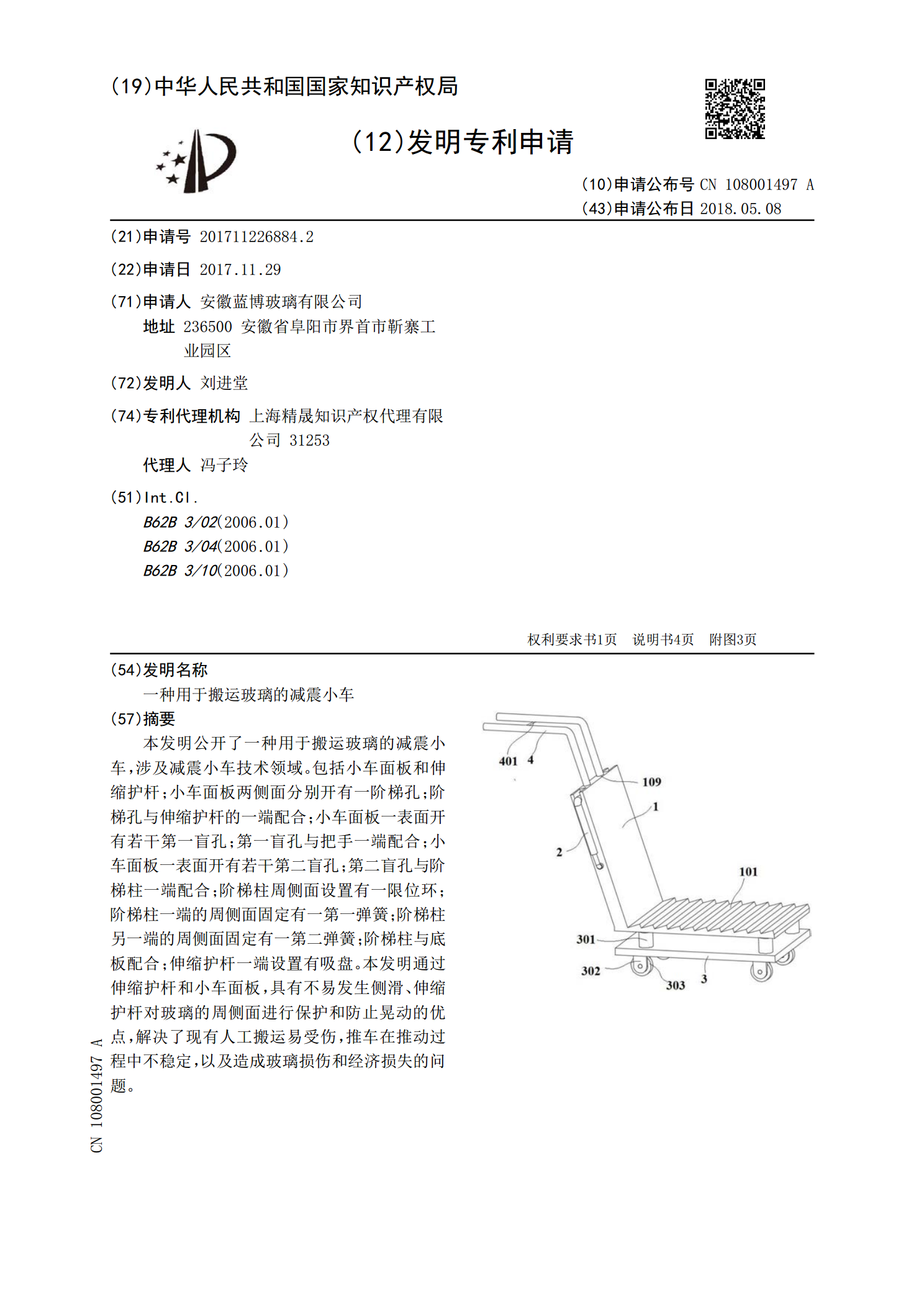
本发明公开了一种用于搬运玻璃的减震小车,涉及减震小车技术领域。包括小车面板和伸缩护杆;小车面板两侧面分别开有一阶梯孔;阶梯孔与伸缩护杆的一端配合;小车面板一表面开有若干第一盲孔;第一盲孔与把手一端配合;小车面板一表面开有若干第二盲孔;第二盲孔与阶梯柱一端配合;阶梯柱周侧面设置有一限位环;阶梯柱一端的周侧面固定有一第一弹簧;阶梯柱另一端的周侧面固定有一第二弹簧;阶梯柱与底板配合;伸缩护杆一端设置有吸盘。本发明通过伸缩护杆和小车面板,具有不易发生侧滑、伸缩护杆对玻璃的周侧面进行保护和防止晃动的优点,解决了现有

一种主动转向系统、主动转向控制方法及车辆的控制装置.pdf
本发明涉及汽车工程技术领域,具体涉及一种主动转向系统、主动转向控制方法及车辆的控制装置。通过控制装置控制车辆对当前的转向模式进行选择,当选择当前转向模式为自动驾驶转向模式时,获取路况信息以及车辆状态信息,并根据获取的信息进行理想转角计算,得到理想转矩,然后控制装置控制电动助力装置输出理想转矩至力矩传递机构,液压转向器根据力矩传递机构传递的力矩对车辆轮胎进行液压助力,进而实现对车辆轮胎的主动转向。

一种后轮主动转向装置.pdf
本发明涉及汽车领域,特别是一种后轮主动转向装置,包括车架,还包括电机控制器,车架上固定有由电机控制器电连接控制的直线电机,所述直线电机输出轴通过驱动臂连接有在车架横向直线运动的移动轴,所述移动轴两端分别连接有转向拉杆,所述转向拉杆均通过转向臂连接后轮。本发明可实现后轮大角度转向,可根据客户实际需求根据控制器设定后轮转向角的大小,适应全路段全路况(如车库、山区等),在可控的范围内能够通过伺服电机控制器的一键解除功能解除后轮转向,同时,结构简单、安装牢固、维修方便、使用寿命长。