
一种登船桥及其行走控制方法.pdf

是你****平呀


1/8

2/8

3/8

4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种登船桥及其行走控制方法.pdf
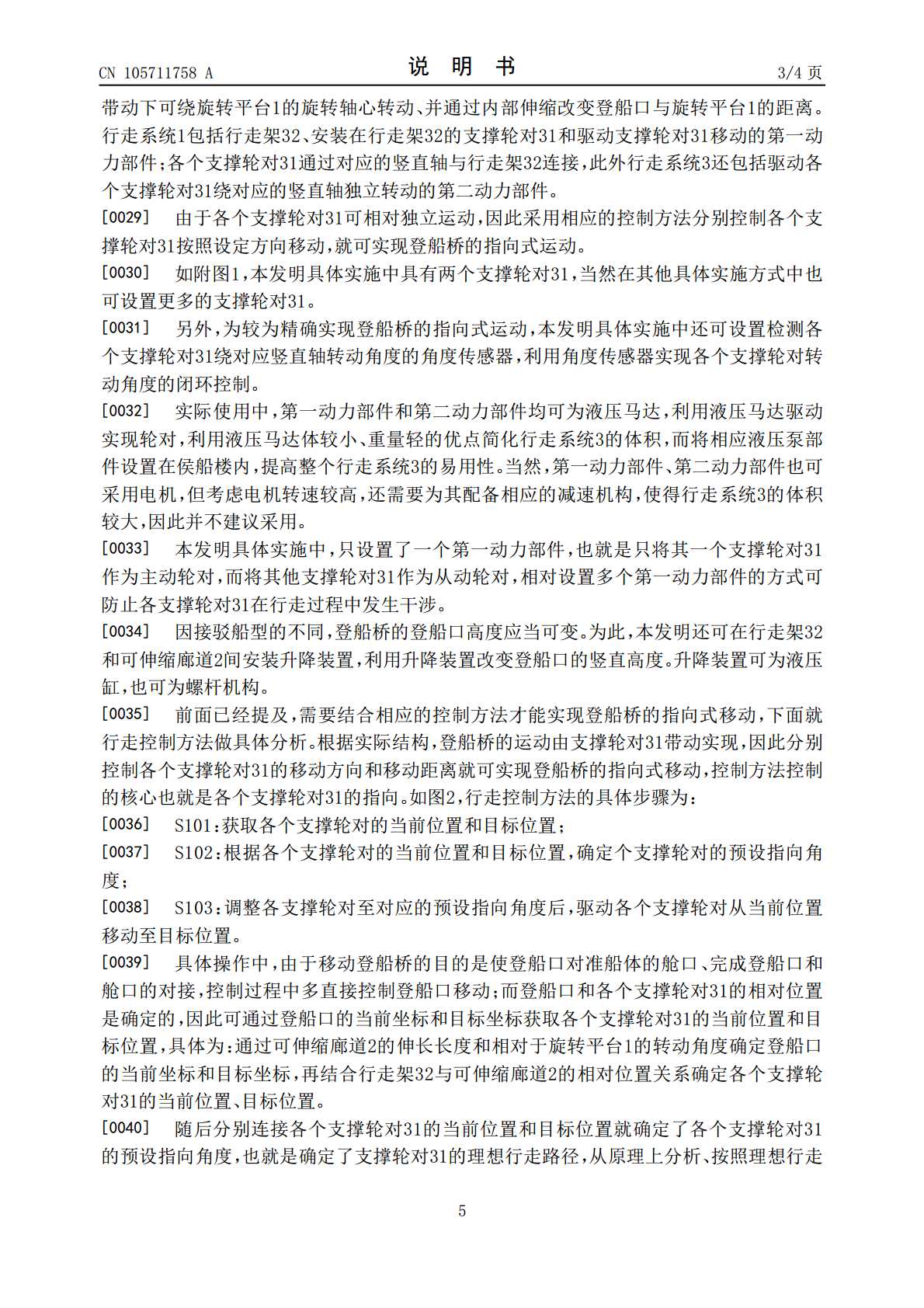
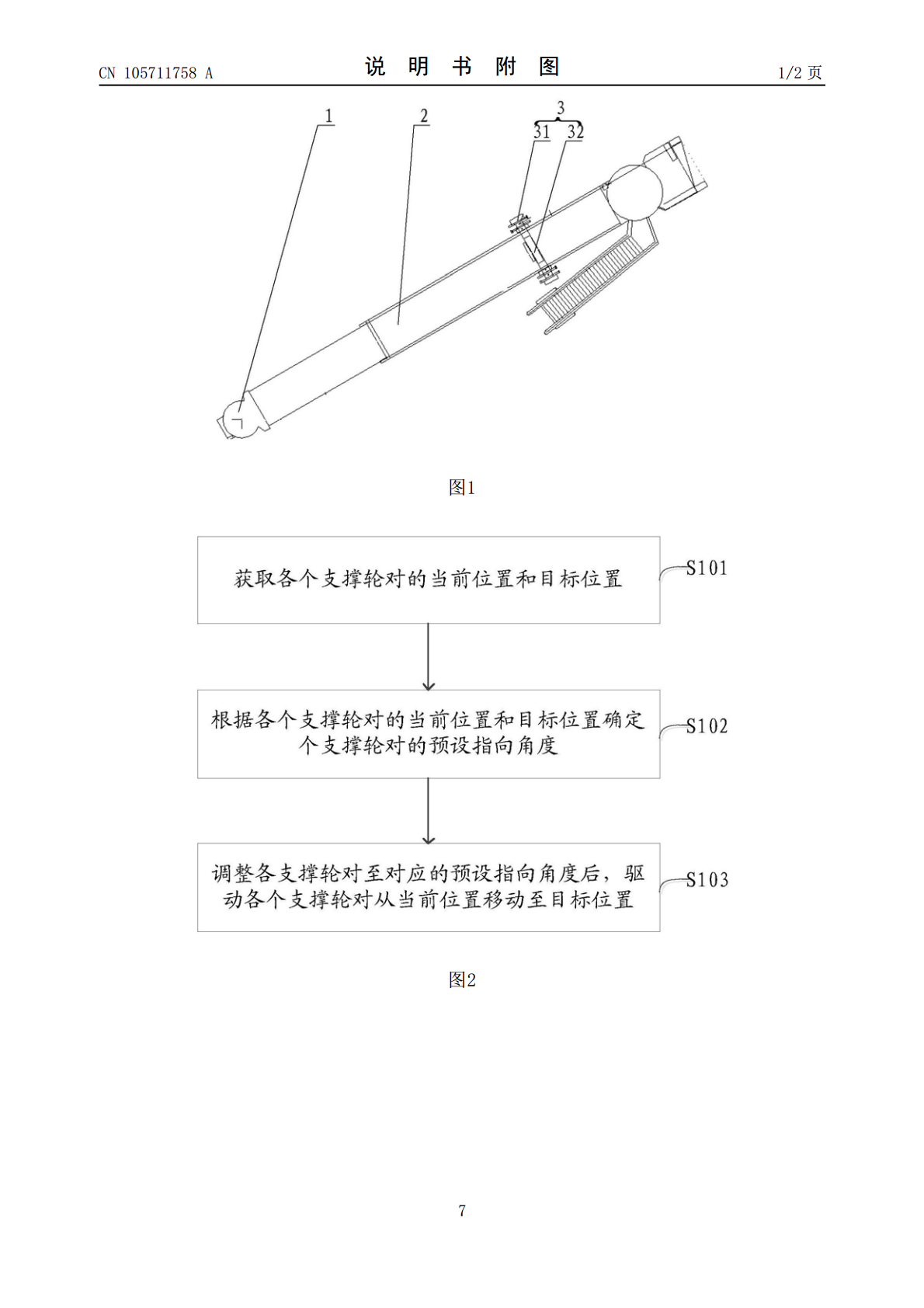
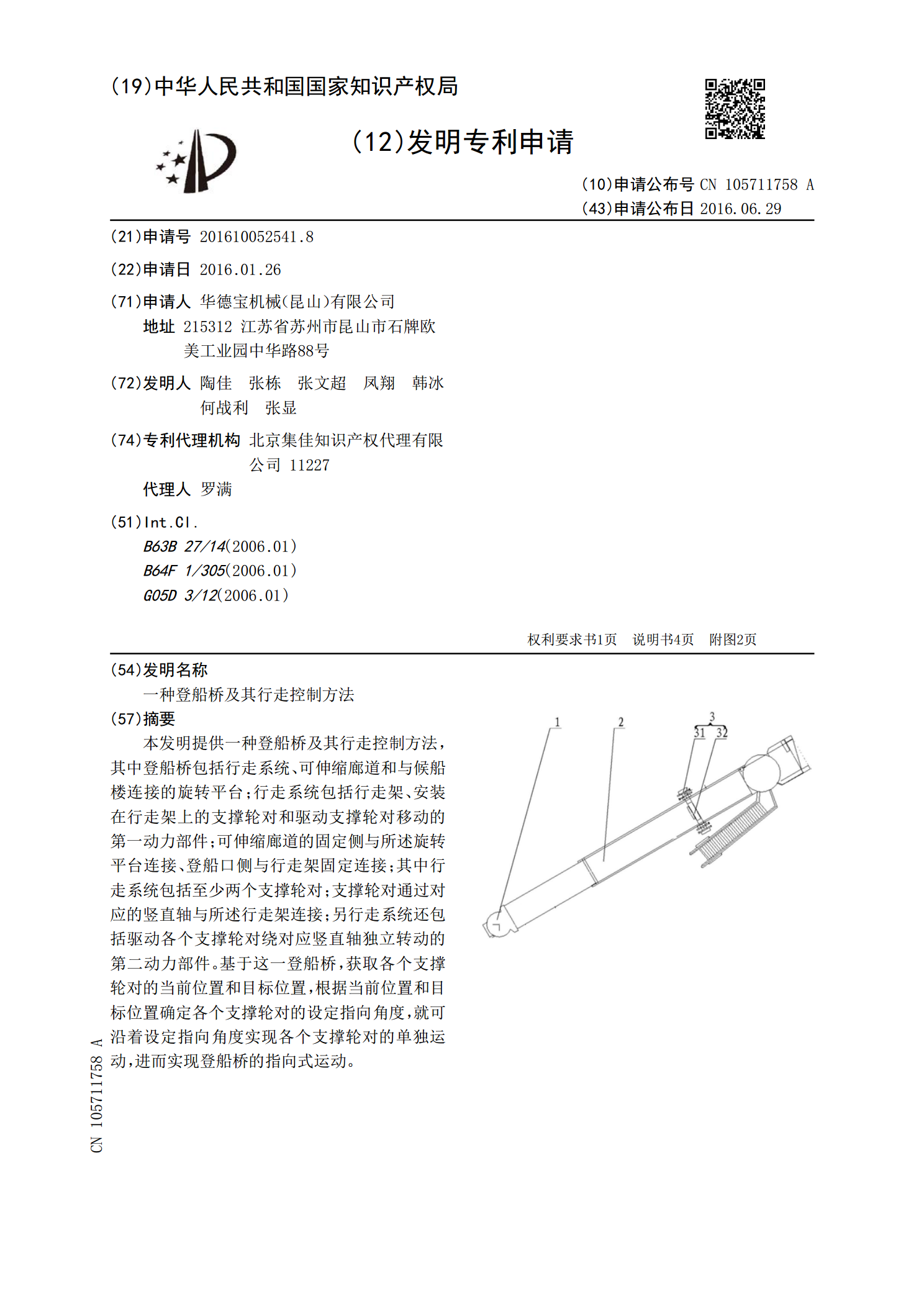
本发明提供一种登船桥及其行走控制方法,其中登船桥包括行走系统、可伸缩廊道和与候船楼连接的旋转平台;行走系统包括行走架、安装在行走架上的支撑轮对和驱动支撑轮对移动的第一动力部件;可伸缩廊道的固定侧与所述旋转平台连接、登船口侧与行走架固定连接;其中行走系统包括至少两个支撑轮对;支撑轮对通过对应的竖直轴与所述行走架连接;另行走系统还包括驱动各个支撑轮对绕对应竖直轴独立转动的第二动力部件。基于这一登船桥,获取各个支撑轮对的当前位置和目标位置,根据当前位置和目标位置确定各个支撑轮对的设定指向角度,就可沿着设定指向角
邮轮登船桥及其控制方法.pdf
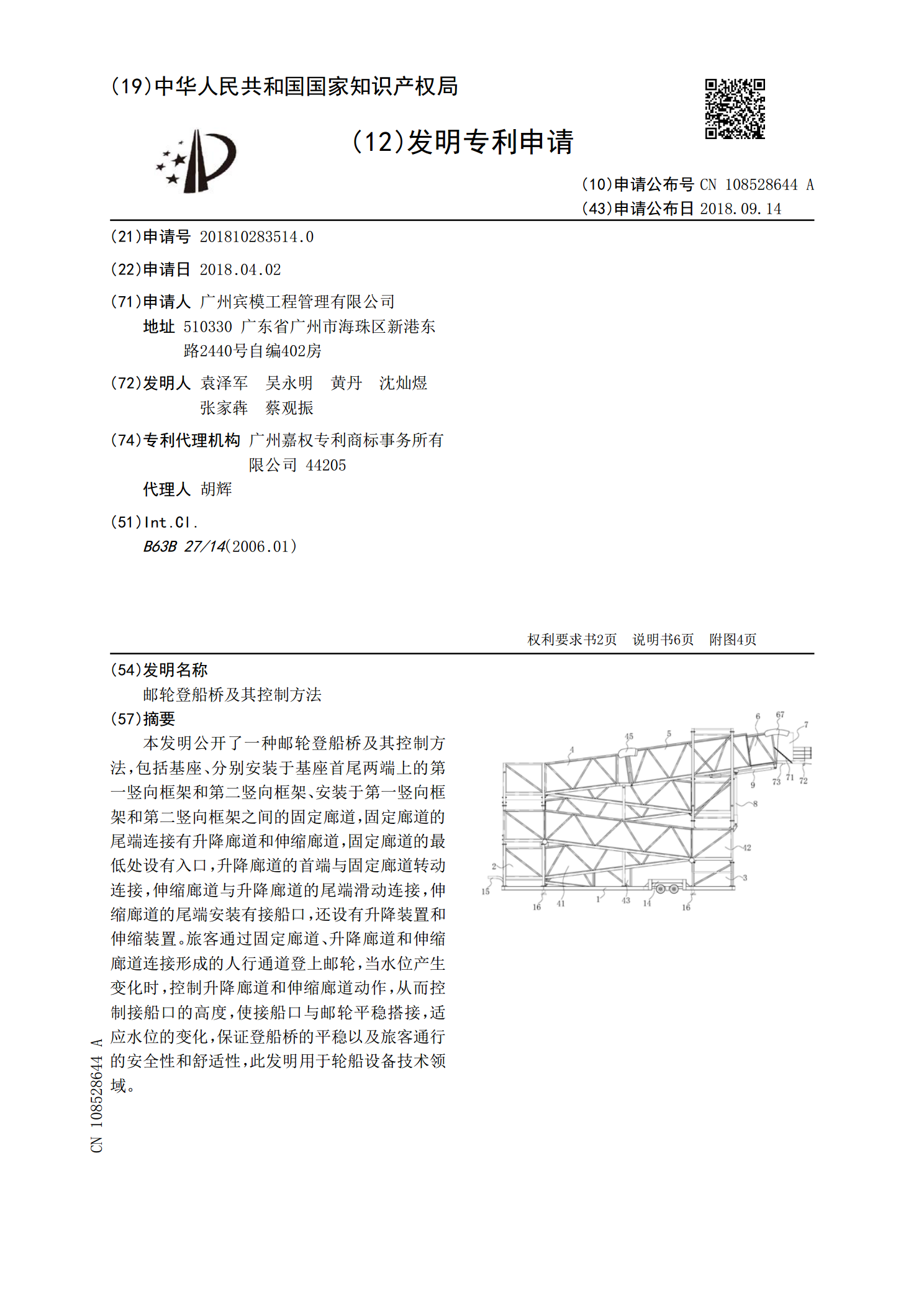
本发明公开了一种邮轮登船桥及其控制方法,包括基座、分别安装于基座首尾两端上的第一竖向框架和第二竖向框架、安装于第一竖向框架和第二竖向框架之间的固定廊道,固定廊道的尾端连接有升降廊道和伸缩廊道,固定廊道的最低处设有入口,升降廊道的首端与固定廊道转动连接,伸缩廊道与升降廊道的尾端滑动连接,伸缩廊道的尾端安装有接船口,还设有升降装置和伸缩装置。旅客通过固定廊道、升降廊道和伸缩廊道连接形成的人行通道登上邮轮,当水位产生变化时,控制升降廊道和伸缩廊道动作,从而控制接船口的高度,使接船口与邮轮平稳搭接,适应水位的变化
一种轮式摊铺机行走系统及其控制方法.pdf
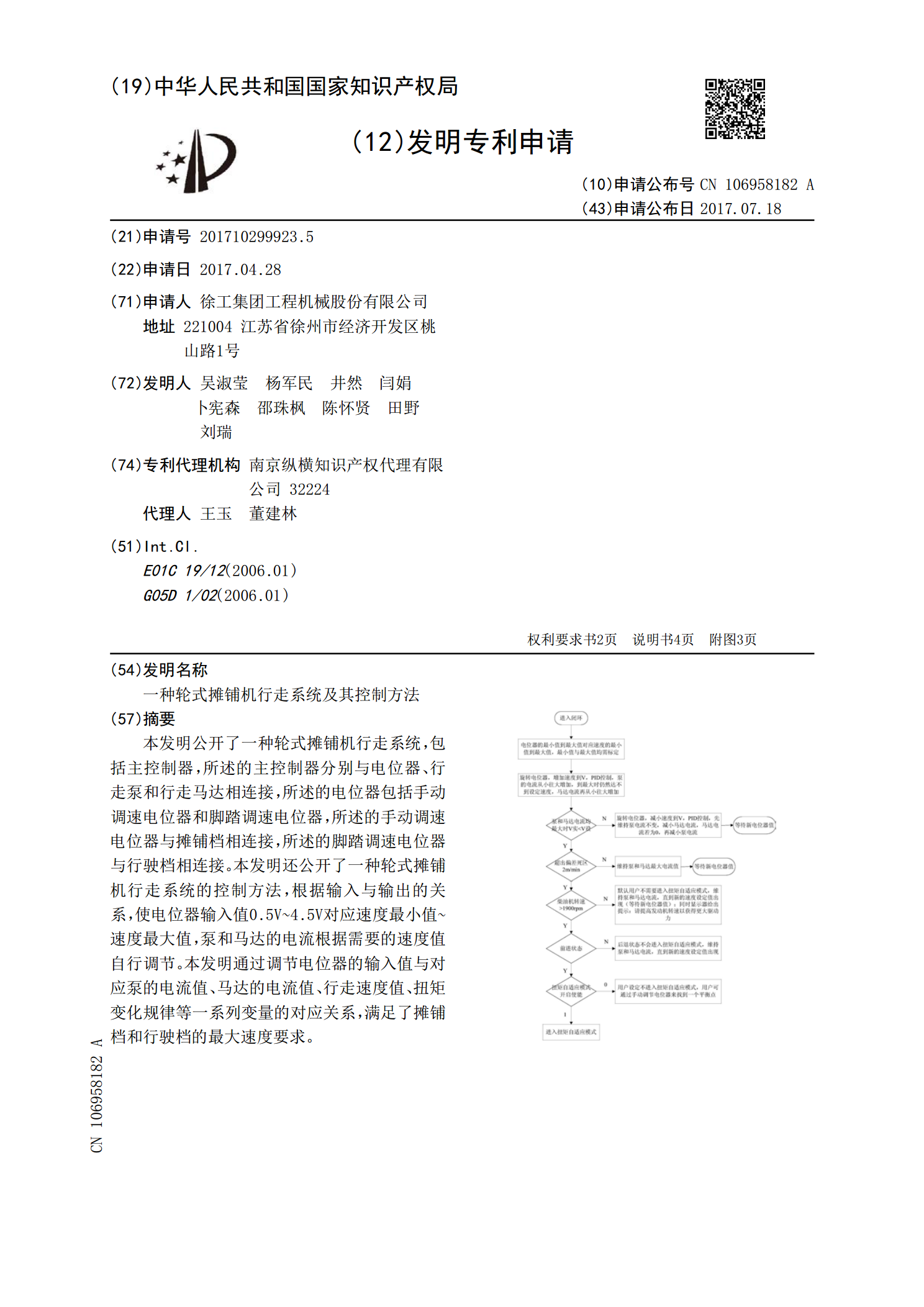
本发明公开了一种轮式摊铺机行走系统,包括主控制器,所述的主控制器分别与电位器、行走泵和行走马达相连接,所述的电位器包括手动调速电位器和脚踏调速电位器,所述的手动调速电位器与摊铺档相连接,所述的脚踏调速电位器与行驶档相连接。本发明还公开了一种轮式摊铺机行走系统的控制方法,根据输入与输出的关系,使电位器输入值0.5V~4.5V对应速度最小值~速度最大值,泵和马达的电流根据需要的速度值自行调节。本发明通过调节电位器的输入值与对应泵的电流值、马达的电流值、行走速度值、扭矩变化规律等一系列变量的对应关系,满足了摊铺

一种跨障行走轮、行走机构及其控制行走机构跨障方法.pdf
本发明公开了一种跨障行走轮、行走机构及其控制行走机构跨障方法,属于行走式机械技术领域,其中跨障行走轮包括行走轮本体,行走轮本体内周向布设有若干道导向滑道,导向滑道沿行走轮本体的径向延伸并与外界相通,导向滑道内滑动连接有支撑腿,行走轮本体内设有控制支撑腿伸出导向滑道的控制机构,随支撑腿的伸出相邻两个支撑腿之间能够形成用于跨越障碍的跨障区域,本跨障行走轮提供了一种全新的跨越障碍的方式,在行走轮跨域障碍物时,相邻两个支撑腿所形成的跨障区域能够将障碍物容纳在其中,无需以障碍物为支撑点,直接横跨过障碍物,继而无需担
辅助行走车及其控制方法.pdf
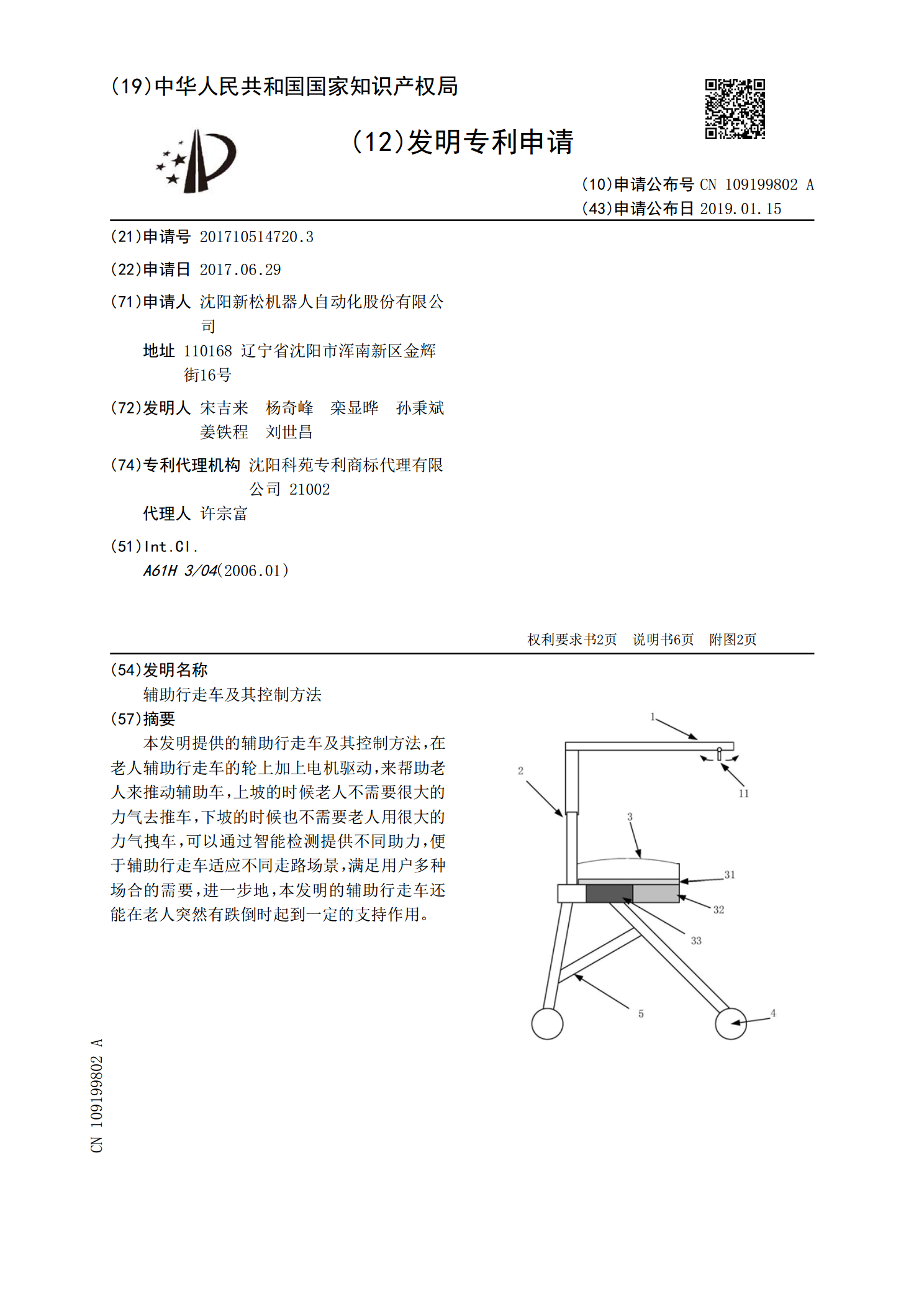
本发明提供的辅助行走车及其控制方法,在老人辅助行走车的轮上加上电机驱动,来帮助老人来推动辅助车,上坡的时候老人不需要很大的力气去推车,下坡的时候也不需要老人用很大的力气拽车,可以通过智能检测提供不同助力,便于辅助行走车适应不同走路场景,满足用户多种场合的需要,进一步地,本发明的辅助行走车还能在老人突然有跌倒时起到一定的支持作用。