
一种跨障行走轮、行走机构及其控制行走机构跨障方法.pdf

书生****35

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种跨障行走轮、行走机构及其控制行走机构跨障方法.pdf
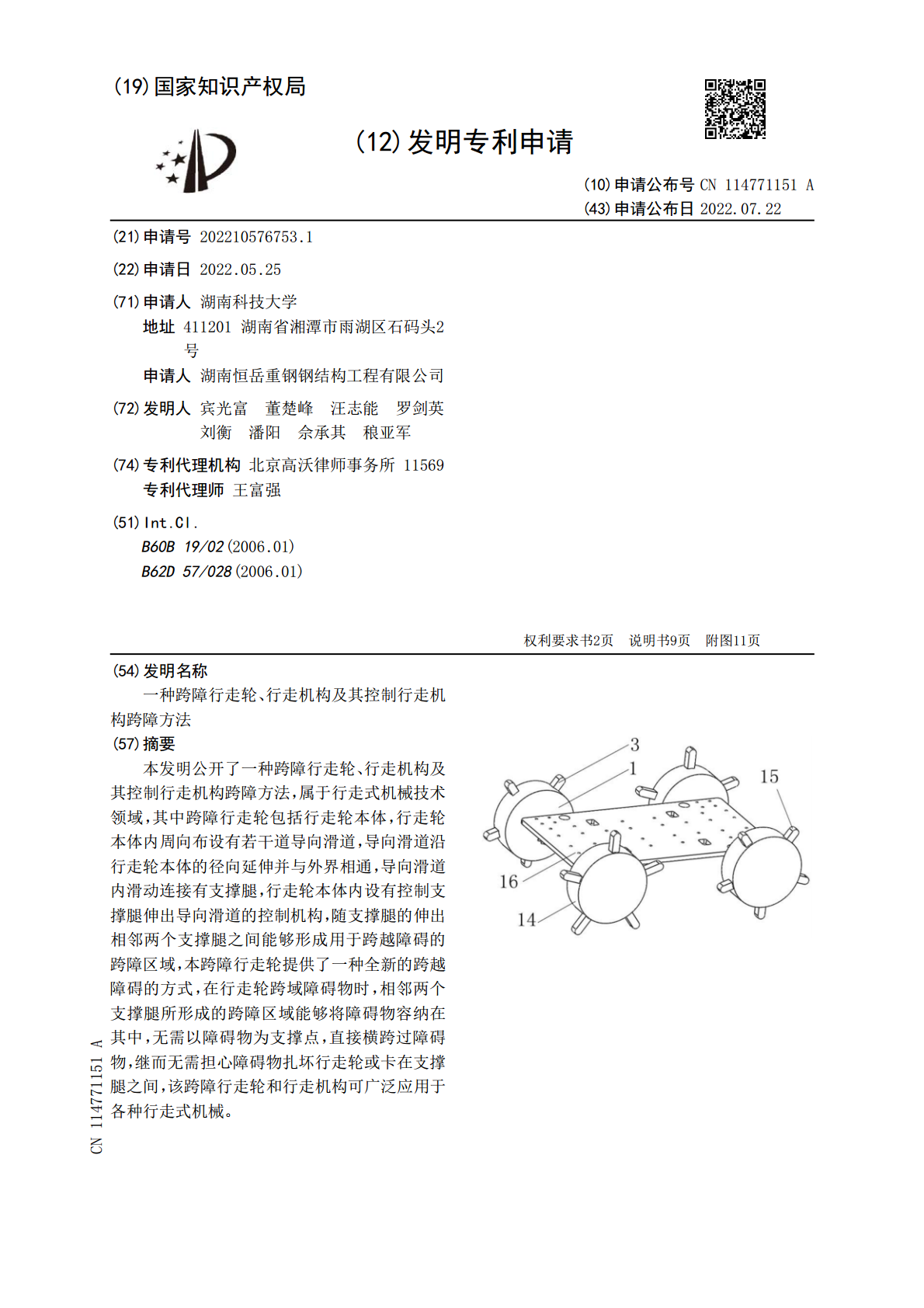
本发明公开了一种跨障行走轮、行走机构及其控制行走机构跨障方法,属于行走式机械技术领域,其中跨障行走轮包括行走轮本体,行走轮本体内周向布设有若干道导向滑道,导向滑道沿行走轮本体的径向延伸并与外界相通,导向滑道内滑动连接有支撑腿,行走轮本体内设有控制支撑腿伸出导向滑道的控制机构,随支撑腿的伸出相邻两个支撑腿之间能够形成用于跨越障碍的跨障区域,本跨障行走轮提供了一种全新的跨越障碍的方式,在行走轮跨域障碍物时,相邻两个支撑腿所形成的跨障区域能够将障碍物容纳在其中,无需以障碍物为支撑点,直接横跨过障碍物,继而无需担

一种自动避障行走机构.pdf
一种自动避障行走机构,用于升降平台车的自动避障行走,包括车体安装架、调节组件、检测组件、避障组件以及控制单元,车体安装架上设置调节组件,调节组件的外端设置检测组件,检测组件上铰接避障组件,避障组件围绕检测组件前后转动,车体安装架与升降平台车配合使用,升降平台车上设置控制单元,控制单元通过线路与升降平台车以及检测组件相连接,避障组件遇到障碍物向后转动碰触到检测组件,检测组件检测信号并传递给控制单元,控制单元控制升降平台车转向,其解决了现有的避障装置存在着因其结构和使用方法的缺陷,从而导致避障效果差、避障范围
新型挂线机器人上下方避障式行走机构及其行走方法.pdf
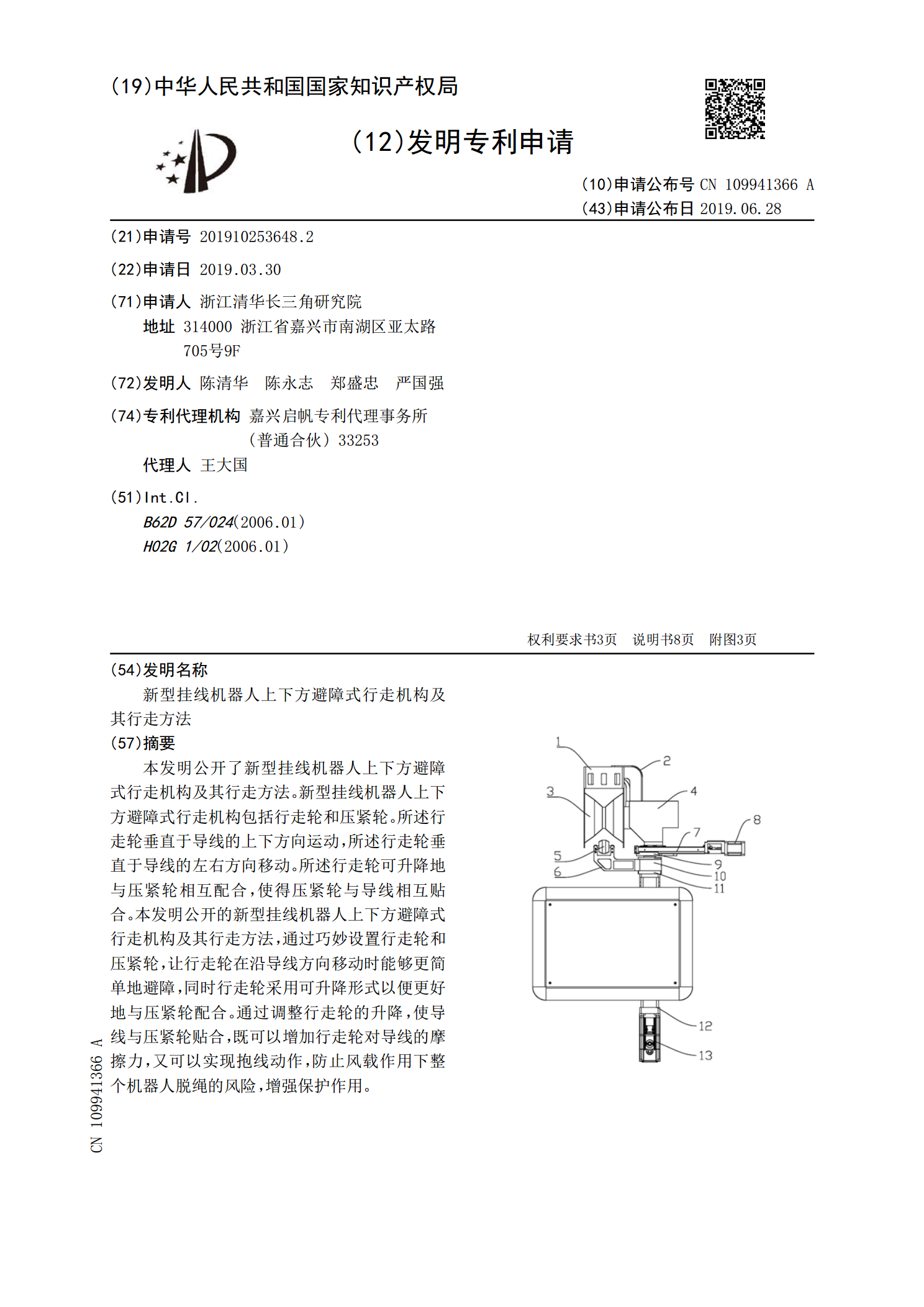
本发明公开了新型挂线机器人上下方避障式行走机构及其行走方法。新型挂线机器人上下方避障式行走机构包括行走轮和压紧轮。所述行走轮垂直于导线的上下方向运动,所述行走轮垂直于导线的左右方向移动。所述行走轮可升降地与压紧轮相互配合,使得压紧轮与导线相互贴合。本发明公开的新型挂线机器人上下方避障式行走机构及其行走方法,通过巧妙设置行走轮和压紧轮,让行走轮在沿导线方向移动时能够更简单地避障,同时行走轮采用可升降形式以便更好地与压紧轮配合。通过调整行走轮的升降,使导线与压紧轮贴合,既可以增加行走轮对导线的摩擦力,又可以实
一种机器人的跨障碍行走机构.pdf
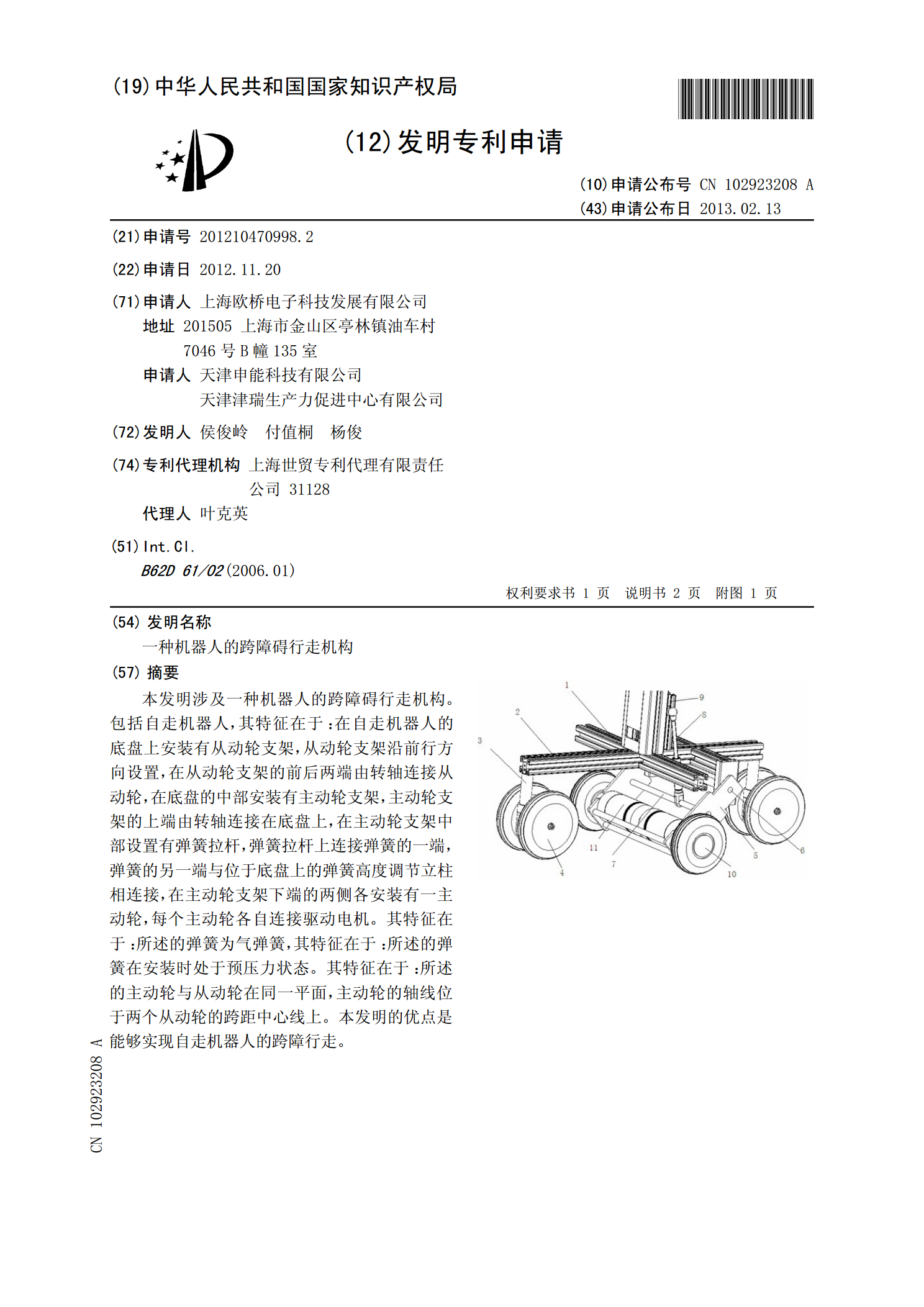
本发明涉及一种机器人的跨障碍行走机构。包括自走机器人,其特征在于:在自走机器人的底盘上安装有从动轮支架,从动轮支架沿前行方向设置,在从动轮支架的前后两端由转轴连接从动轮,在底盘的中部安装有主动轮支架,主动轮支架的上端由转轴连接在底盘上,在主动轮支架中部设置有弹簧拉杆,弹簧拉杆上连接弹簧的一端,弹簧的另一端与位于底盘上的弹簧高度调节立柱相连接,在主动轮支架下端的两侧各安装有一主动轮,每个主动轮各自连接驱动电机。其特征在于:所述的弹簧为气弹簧,其特征在于:所述的弹簧在安装时处于预压力状态。其特征在于:所述的主

行走机构、设有该行走机构的轨道行走设备及其调整方法.pdf
本发明提出一种行走机构、设有该行走机构的轨道行走设备及其调整方法,行走机构包括主体以及多组行走机构;多组行走机构可调整地设于主体下方,每组行走机构包括行走轮及至少一个导向定位块;行走轮用以与一轨道配合;至少一个导向定位块固定于行走轮的至少一侧,导向定位块的下端部开设有导向槽;轨道行走设备放置于轨道上时,导向定位块的导向槽与轨道卡合定位,以使行走轮位于轨道上的一标准位置。本发明提出的轨道行走设备,通过导向定位块的设置,实现了行走机构,即行走轮与轨道的快速准确地导向定位功能,节省了设备的安装调试时间,同时提高