
一种轮式摊铺机行走系统及其控制方法.pdf

St****36


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮式摊铺机行走系统及其控制方法.pdf
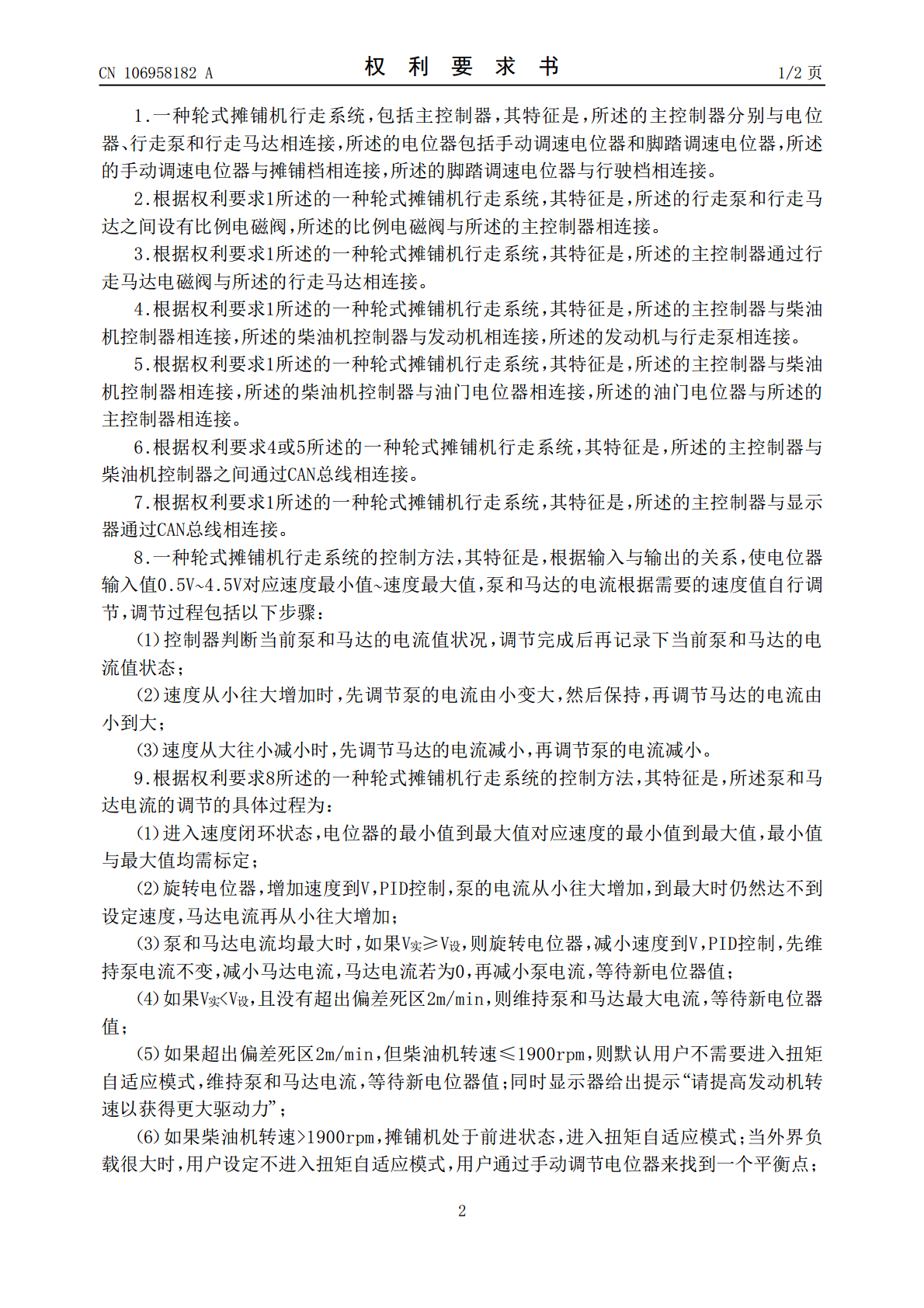
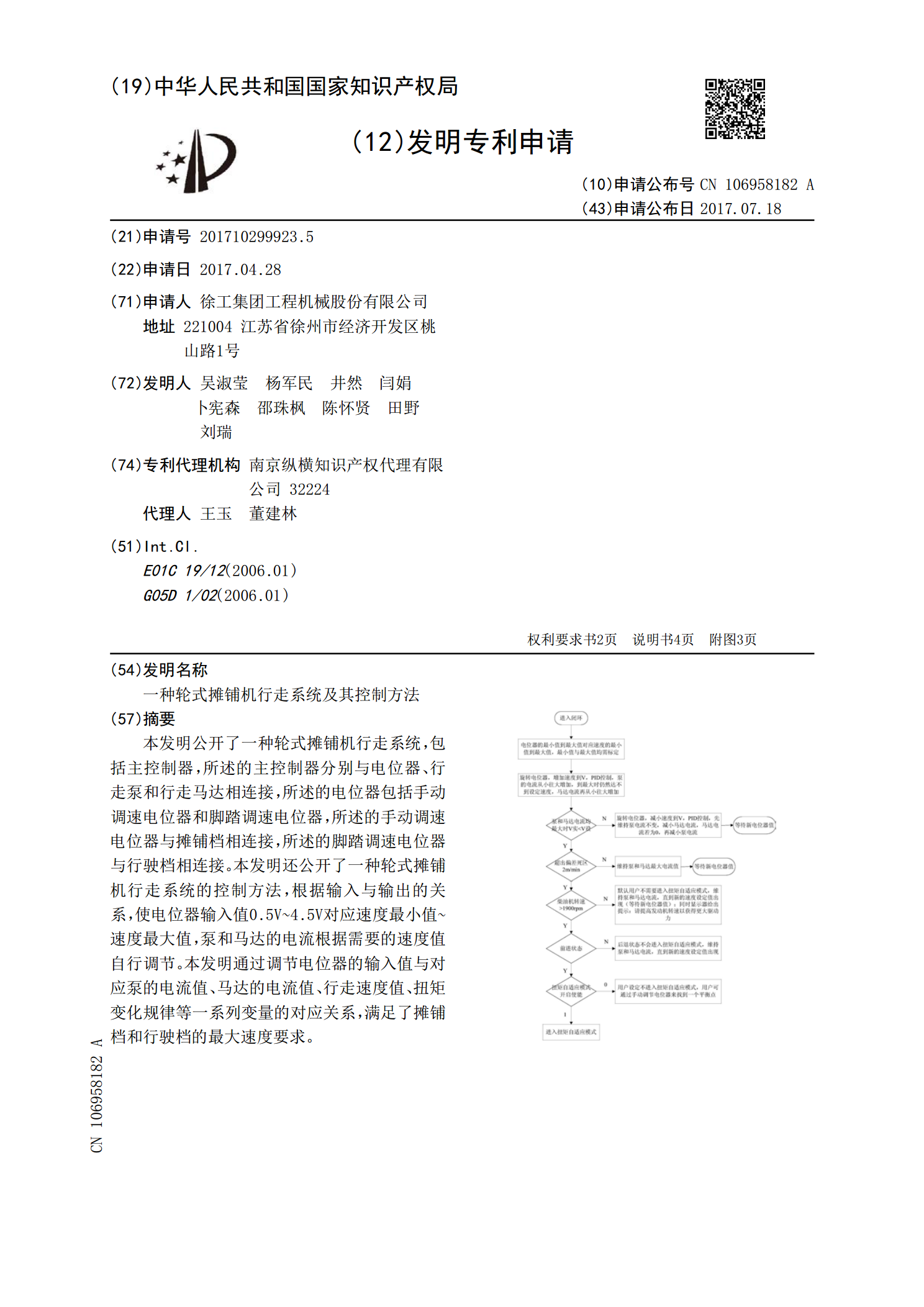
本发明公开了一种轮式摊铺机行走系统,包括主控制器,所述的主控制器分别与电位器、行走泵和行走马达相连接,所述的电位器包括手动调速电位器和脚踏调速电位器,所述的手动调速电位器与摊铺档相连接,所述的脚踏调速电位器与行驶档相连接。本发明还公开了一种轮式摊铺机行走系统的控制方法,根据输入与输出的关系,使电位器输入值0.5V~4.5V对应速度最小值~速度最大值,泵和马达的电流根据需要的速度值自行调节。本发明通过调节电位器的输入值与对应泵的电流值、马达的电流值、行走速度值、扭矩变化规律等一系列变量的对应关系,满足了摊铺

摊铺机行走系统的智能控制方法.pdf
一种摊铺机行走系统的智能控制方法,属于控制摊铺机行走的方法。对轮速进行设定,左轮设定值输入与左轮PID控制器的输出信号并联叠加后,控制左轮行走;左、右轮的速度信号通过传感器同时反馈到:1.左、右轮的PID控制器输入端,与设定值比较构成闭环控制;2.左、右轮传感器的信号相减环节;得到的轮速差和经积分电路后得到距离差,作为两个输入变量到模糊控制器,确定右轮修正量输出,右轮设定值修正量与右轮设定值输入端的设定值叠加控制,控制摊铺机的工作状态。优点:能够有效解决摊铺机行走跑偏量,有效地防止了各控制作用的
全向轮式平台及其行走控制方法.pdf
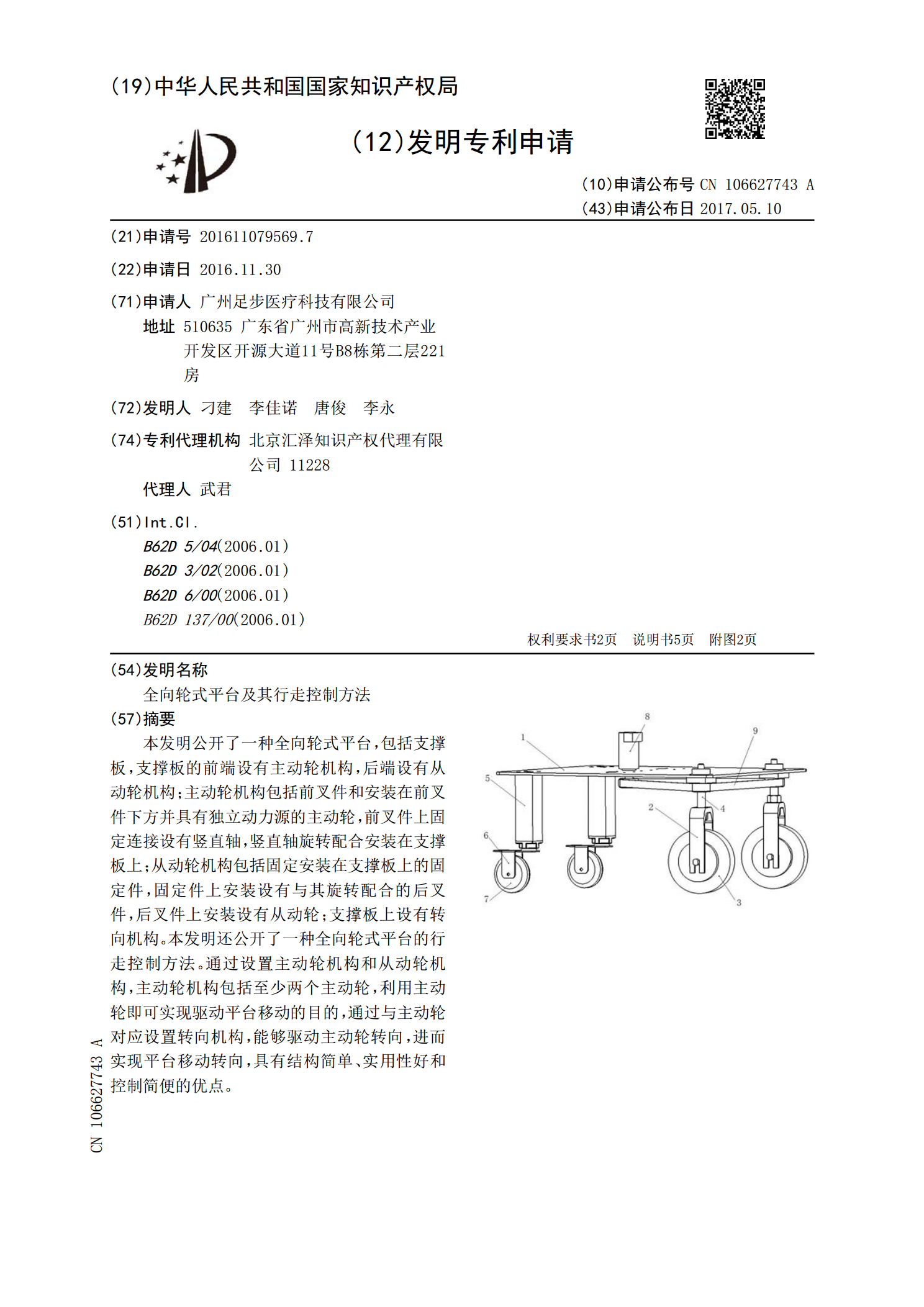
本发明公开了一种全向轮式平台,包括支撑板,支撑板的前端设有主动轮机构,后端设有从动轮机构;主动轮机构包括前叉件和安装在前叉件下方并具有独立动力源的主动轮,前叉件上固定连接设有竖直轴,竖直轴旋转配合安装在支撑板上;从动轮机构包括固定安装在支撑板上的固定件,固定件上安装设有与其旋转配合的后叉件,后叉件上安装设有从动轮;支撑板上设有转向机构。本发明还公开了一种全向轮式平台的行走控制方法。通过设置主动轮机构和从动轮机构,主动轮机构包括至少两个主动轮,利用主动轮即可实现驱动平台移动的目的,通过与主动轮对应设置转向机

一种轮式摊铺机悬挂系统.pdf
本发明公开了一种轮式摊铺机悬挂系统,包括转向前轮悬挂系统、驱动后轮悬挂系统及驱动桥;转向前轮悬挂系统包括两个“E型”前摆架、两个前转向轮架和两个后转向轮架;每个前摆架通过位于前摆架板两端的插板分别连接同侧的前、后转向轮架,并通过位于前摆架板中部的轴套与固定在机身上的摆架轴连接,且能绕该摆架轴摆动;所述的驱动后轮悬挂系统包括两个“E型”后摆架,每个后摆架通过位于后摆架板两端的后驱动轮轴连接同侧的后轮,并通过位于后摆架板中部的轴套与固定在机身上的摆架轴连接,且能绕该摆架轴摆动。使机身和轮胎之间由原来的刚性连接

轮式挖掘机的行走控制方法、行走控制装置及轮式挖掘机.pdf
本申请提供了一种轮式挖掘机的行走控制方法、行走控制装置及轮式挖掘机,行走控制方法包括获取轮式挖掘机以预设行走速度行走时的预警行走时长阈值和安全行走时长阈值,并实时获取轮式挖掘机行走时的实际行走时长;若检测到轮式挖掘机在当前时刻之前的第一时长内的实际行走时长大于预警行走时长阈值,则发出预警信号;若检测到轮式挖掘机在当前时刻之前的第二时长内的实际行走时长大于安全行走时长阈值,则发出第一报警信号,和/或控制轮式挖掘机的行走系统停止工作。当轮式挖掘机在持续行走达到一定时间后,会先预警,若驾驶员继续行驶,则会产生报