
一种欠驱动多关节机械臂.pdf

Th****s3


1/8
2/8

3/8

4/8
5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种欠驱动多关节机械臂.pdf
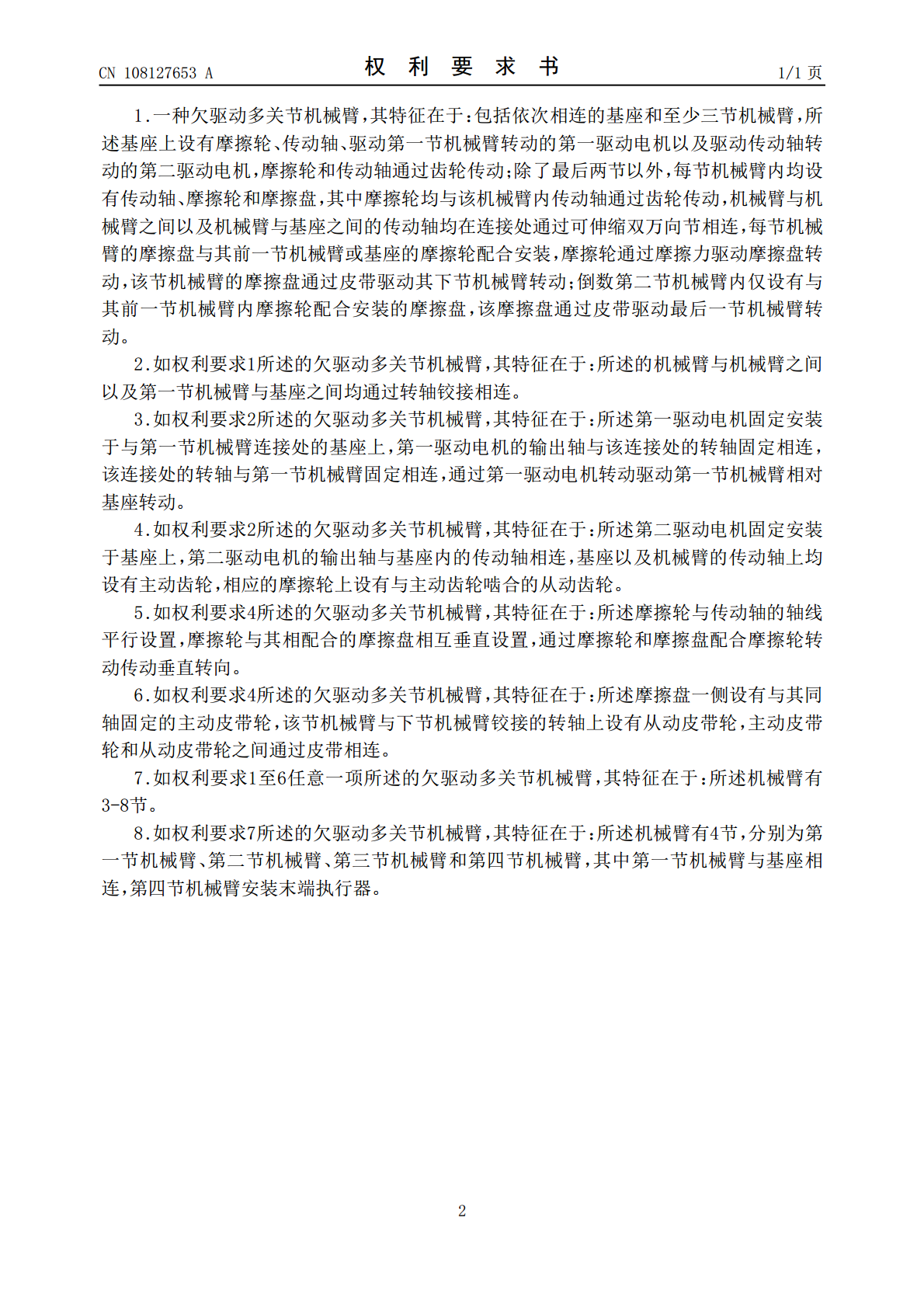
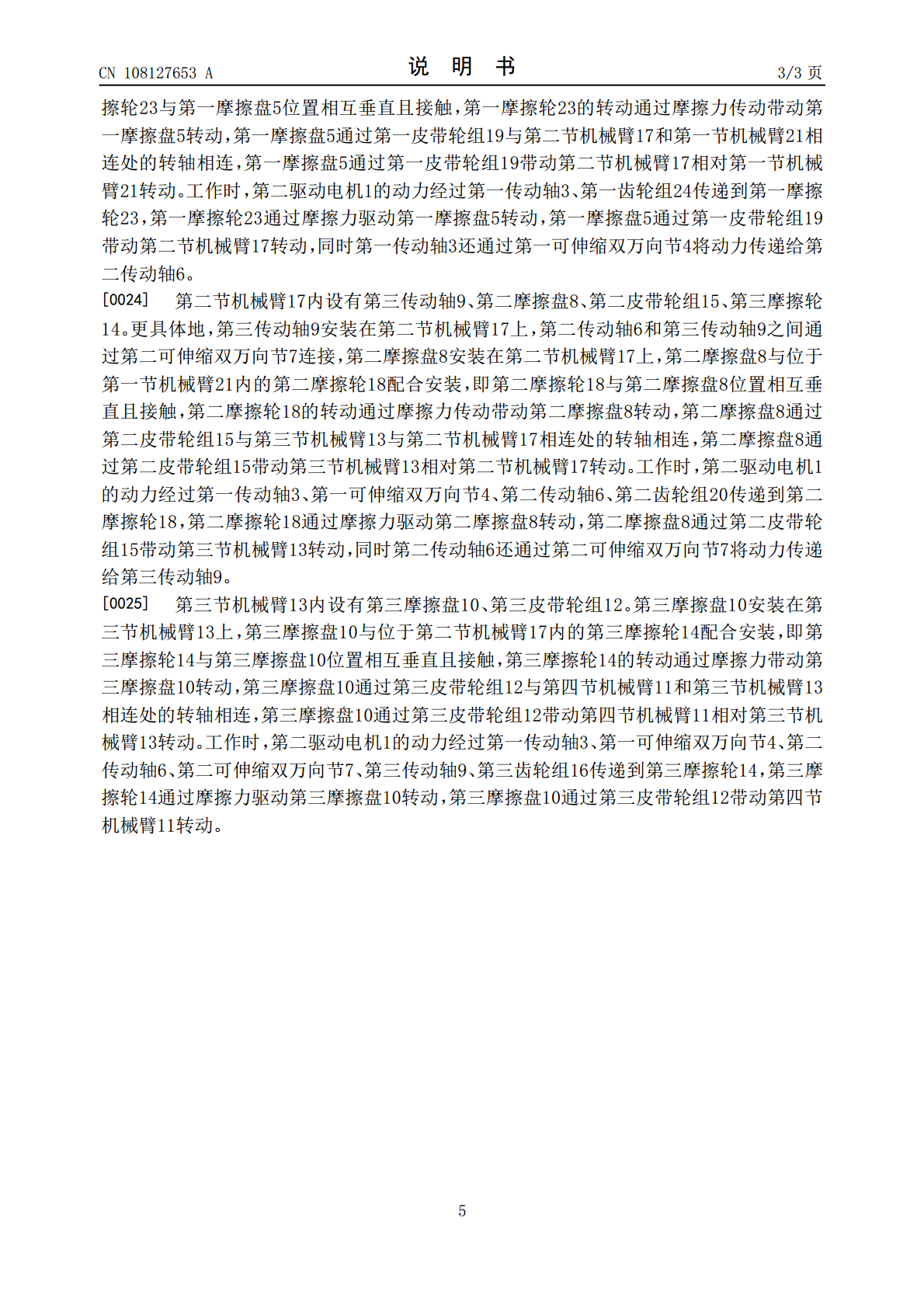
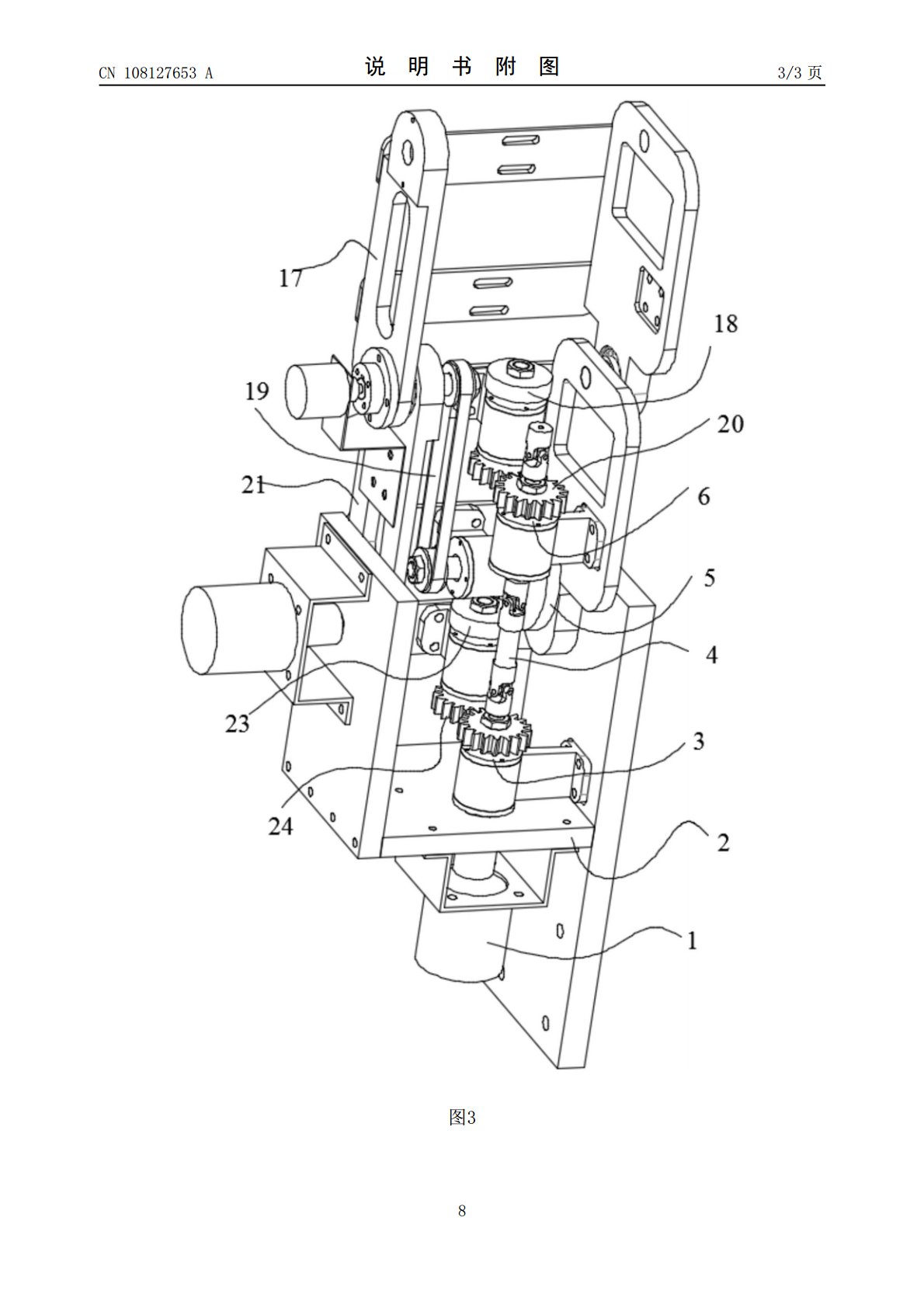
本发明公开了一种欠驱动多关节机械臂,包括依次相连的基座和至少三节机械臂,基座上设有摩擦轮、传动轴、第一驱动电机以及第二驱动电机,摩擦轮和传动轴通过齿轮传动;除了最后两节以外,每节机械臂内均设有传动轴、摩擦轮和摩擦盘,其中摩擦轮均与该机械臂内传动轴通过齿轮传动,机械臂与机械臂之间以及机械臂与基座之间的传动轴均在连接处通过可伸缩双万向节相连,每节机械臂的摩擦盘与其前一节机械臂或基座的摩擦轮配合安装,摩擦盘通过皮带驱动其下节机械臂转动;倒数第二节机械臂内仅设有与其前一节机械臂内摩擦轮配合安装的摩擦盘,该摩擦盘通
一种欠驱动多连杆式可折叠巡检机械臂.pdf
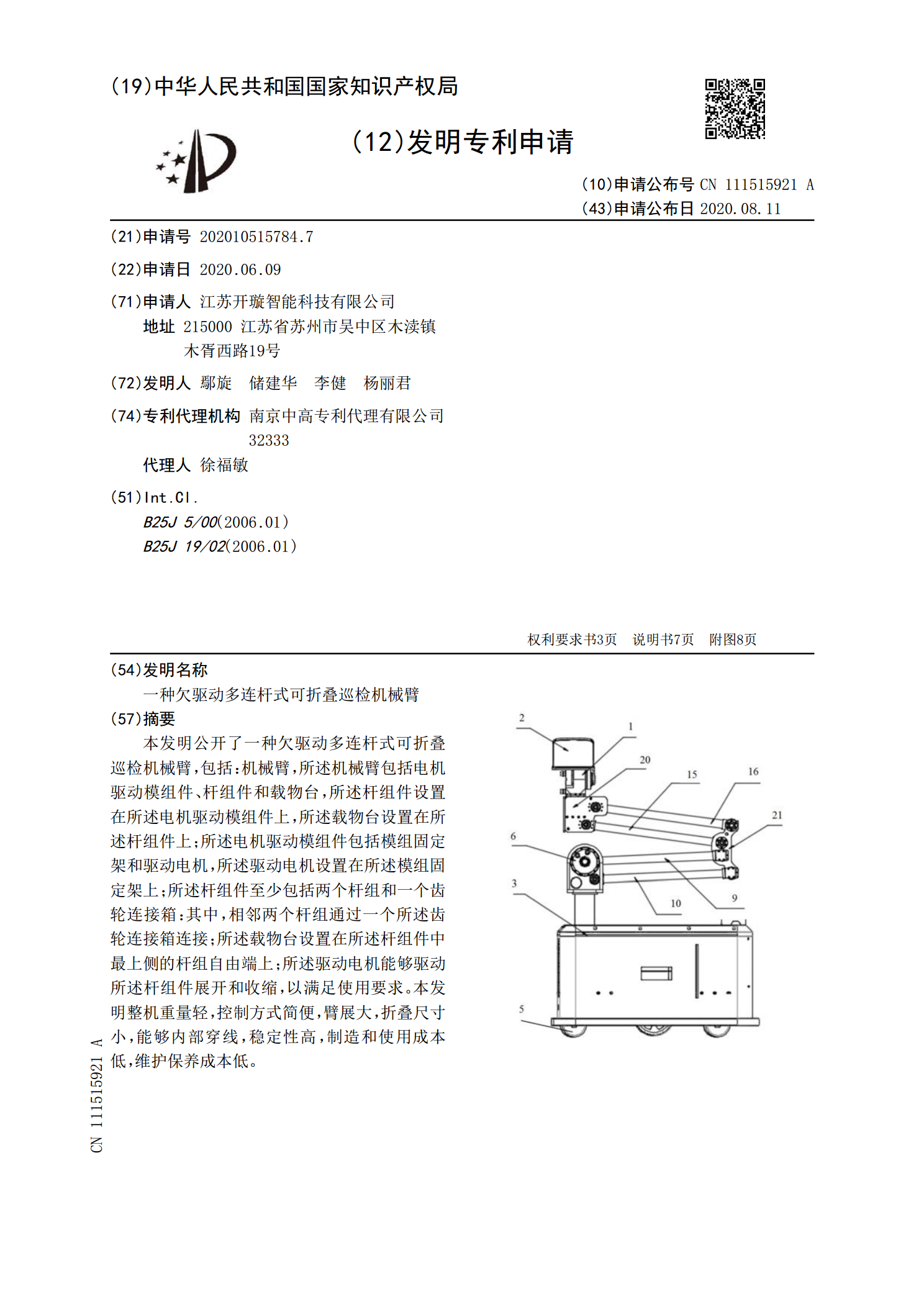
本发明公开了一种欠驱动多连杆式可折叠巡检机械臂,包括:机械臂,所述机械臂包括电机驱动模组件、杆组件和载物台,所述杆组件设置在所述电机驱动模组件上,所述载物台设置在所述杆组件上;所述电机驱动模组件包括模组固定架和驱动电机,所述驱动电机设置在所述模组固定架上;所述杆组件至少包括两个杆组和一个齿轮连接箱:其中,相邻两个杆组通过一个所述齿轮连接箱连接;所述载物台设置在所述杆组件中最上侧的杆组自由端上;所述驱动电机能够驱动所述杆组件展开和收缩,以满足使用要求。本发明整机重量轻,控制方式简便,臂展大,折叠尺寸小,能够
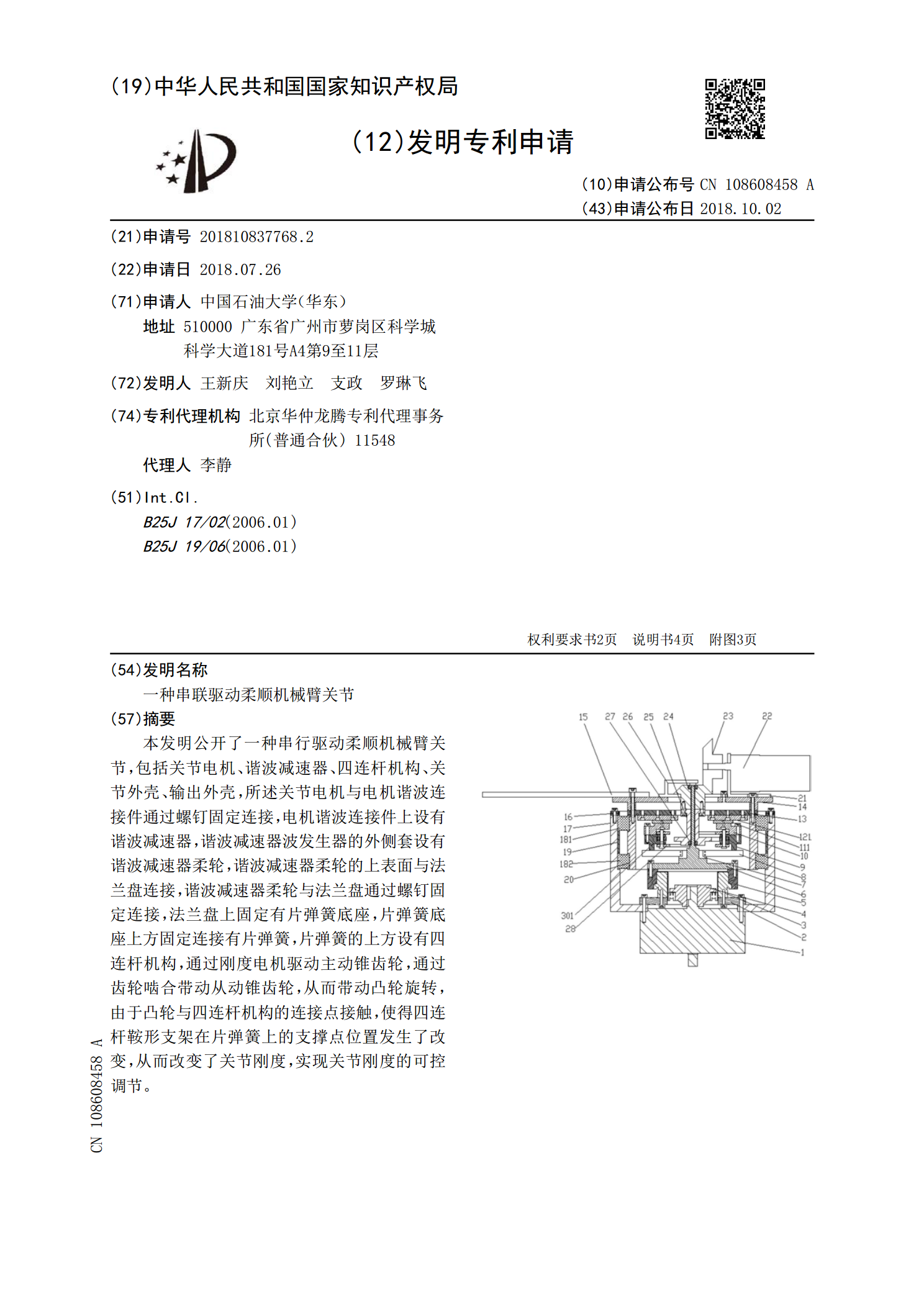
一种串联驱动柔顺机械臂关节.pdf
本发明公开了一种串行驱动柔顺机械臂关节,包括关节电机、谐波减速器、四连杆机构、关节外壳、输出外壳,所述关节电机与电机谐波连接件通过螺钉固定连接,电机谐波连接件上设有谐波减速器,谐波减速器波发生器的外侧套设有谐波减速器柔轮,谐波减速器柔轮的上表面与法兰盘连接,谐波减速器柔轮与法兰盘通过螺钉固定连接,法兰盘上固定有片弹簧底座,片弹簧底座上方固定连接有片弹簧,片弹簧的上方设有四连杆机构,通过刚度电机驱动主动锥齿轮,通过齿轮啮合带动从动锥齿轮,从而带动凸轮旋转,由于凸轮与四连杆机构的连接点接触,使得四连杆鞍形支架
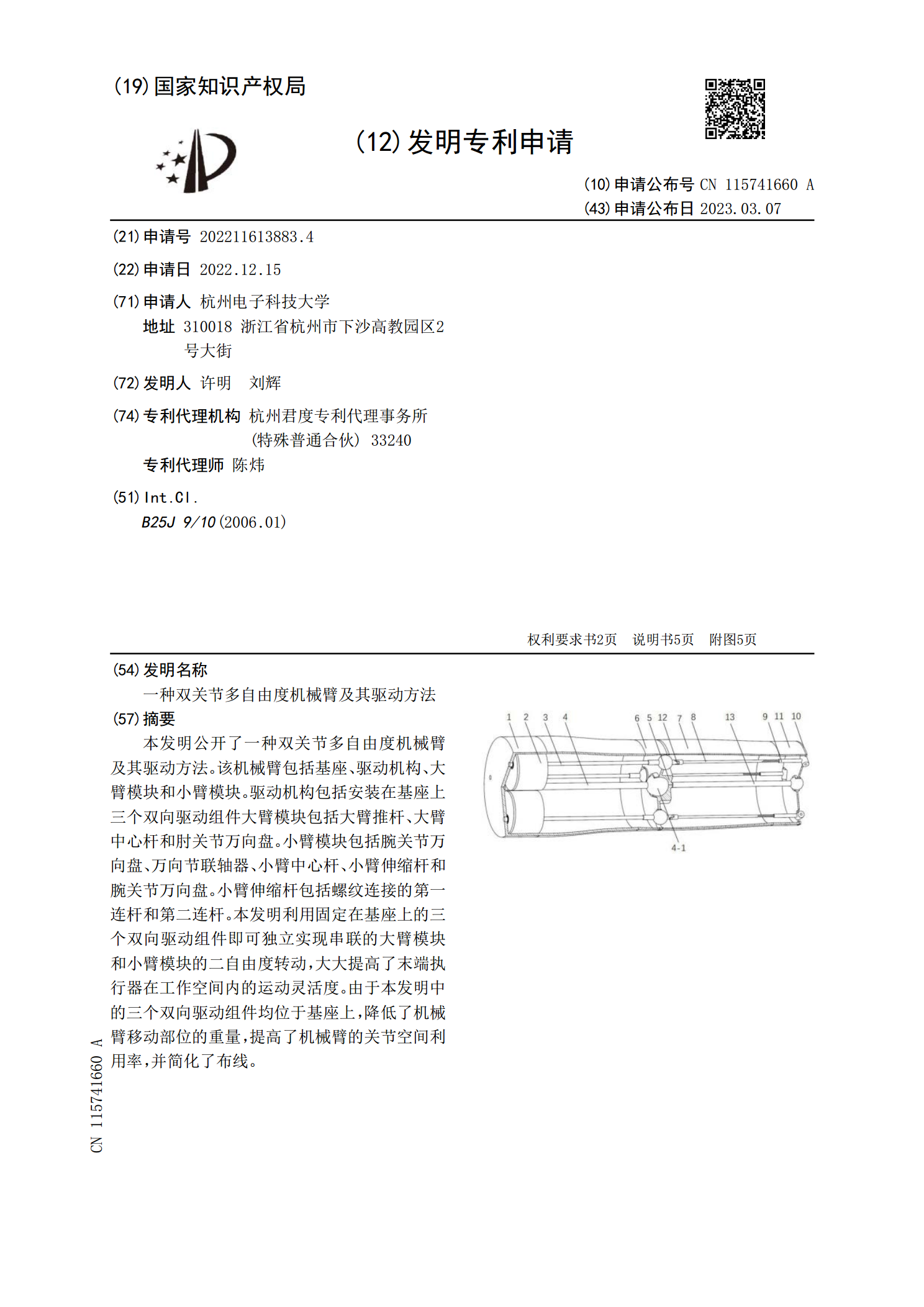
一种双关节多自由度机械臂及其驱动方法.pdf
本发明公开了一种双关节多自由度机械臂及其驱动方法。该机械臂包括基座、驱动机构、大臂模块和小臂模块。驱动机构包括安装在基座上三个双向驱动组件大臂模块包括大臂推杆、大臂中心杆和肘关节万向盘。小臂模块包括腕关节万向盘、万向节联轴器、小臂中心杆、小臂伸缩杆和腕关节万向盘。小臂伸缩杆包括螺纹连接的第一连杆和第二连杆。本发明利用固定在基座上的三个双向驱动组件即可独立实现串联的大臂模块和小臂模块的二自由度转动,大大提高了末端执行器在工作空间内的运动灵活度。由于本发明中的三个双向驱动组件均位于基座上,降低了机械臂移动部位

一种机械臂关节多角度驱动装置.pdf
本实用新型涉及机械臂技术领域,且公开了一种机械臂关节多角度驱动装置,包括底板,所述底板的顶部固定连接有环形仓,所述环形仓的内部转动连接有支撑杆,所述支撑杆的内部转动连接有第一转动臂,所述第一转动臂的内部转动连接有第二转动臂,所述环形仓的内部设置有转动组件,所述支撑杆和第一转动臂的内部均设置有调节组件,所述第二转动臂的右侧设置有夹持组件,所述转动组件包括与环形仓的内底壁固定连接的第一电机。该机械臂关节多角度驱动装置,通过转动组件可以带动支撑杆进行转动,再通过两个调节组件,可以对第一转动臂和第二转动臂进行角度