
一种多轴液压伺服耦合运动的控制方法.pdf

丹烟****魔王

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多轴液压伺服耦合运动的控制方法.pdf
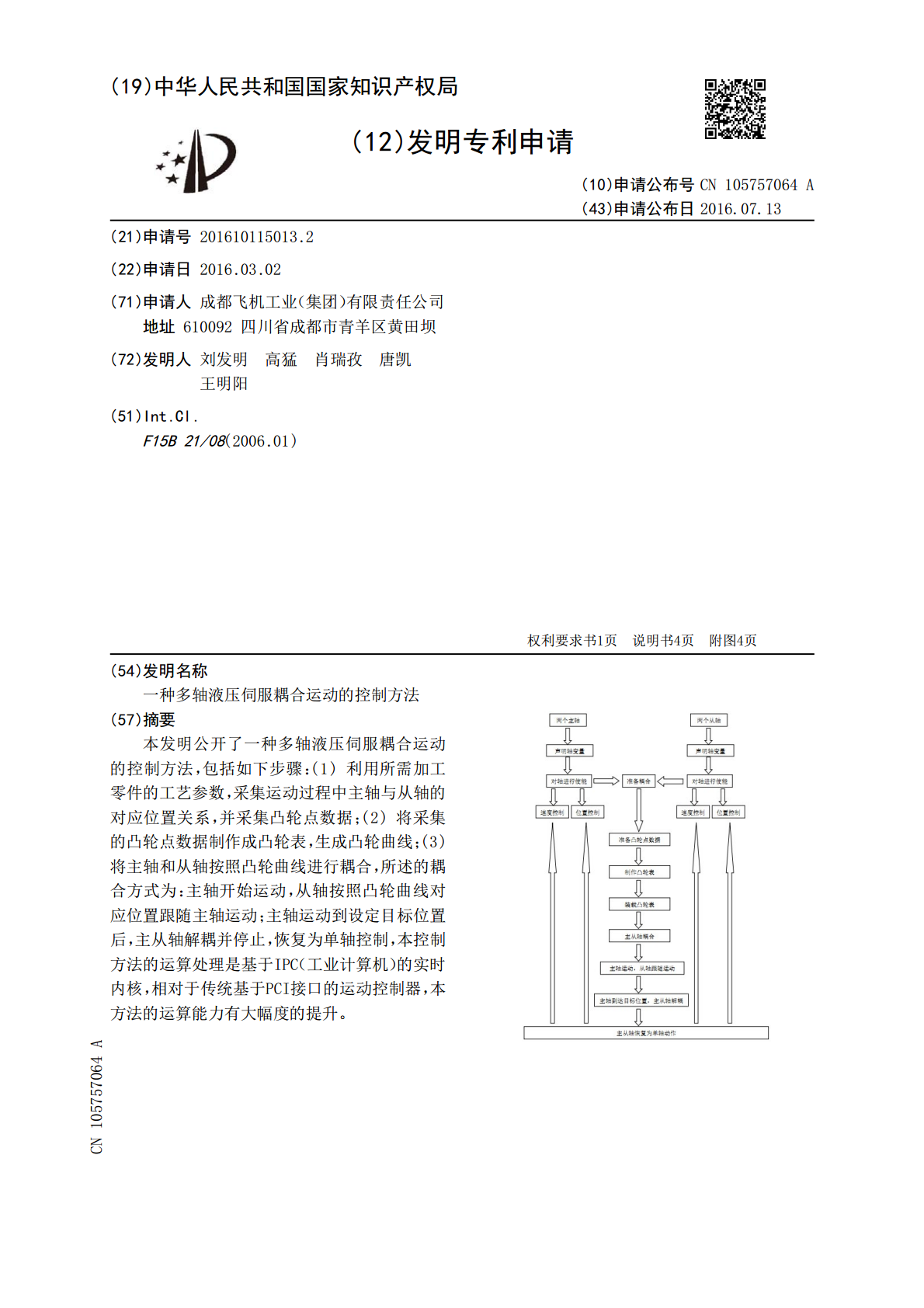
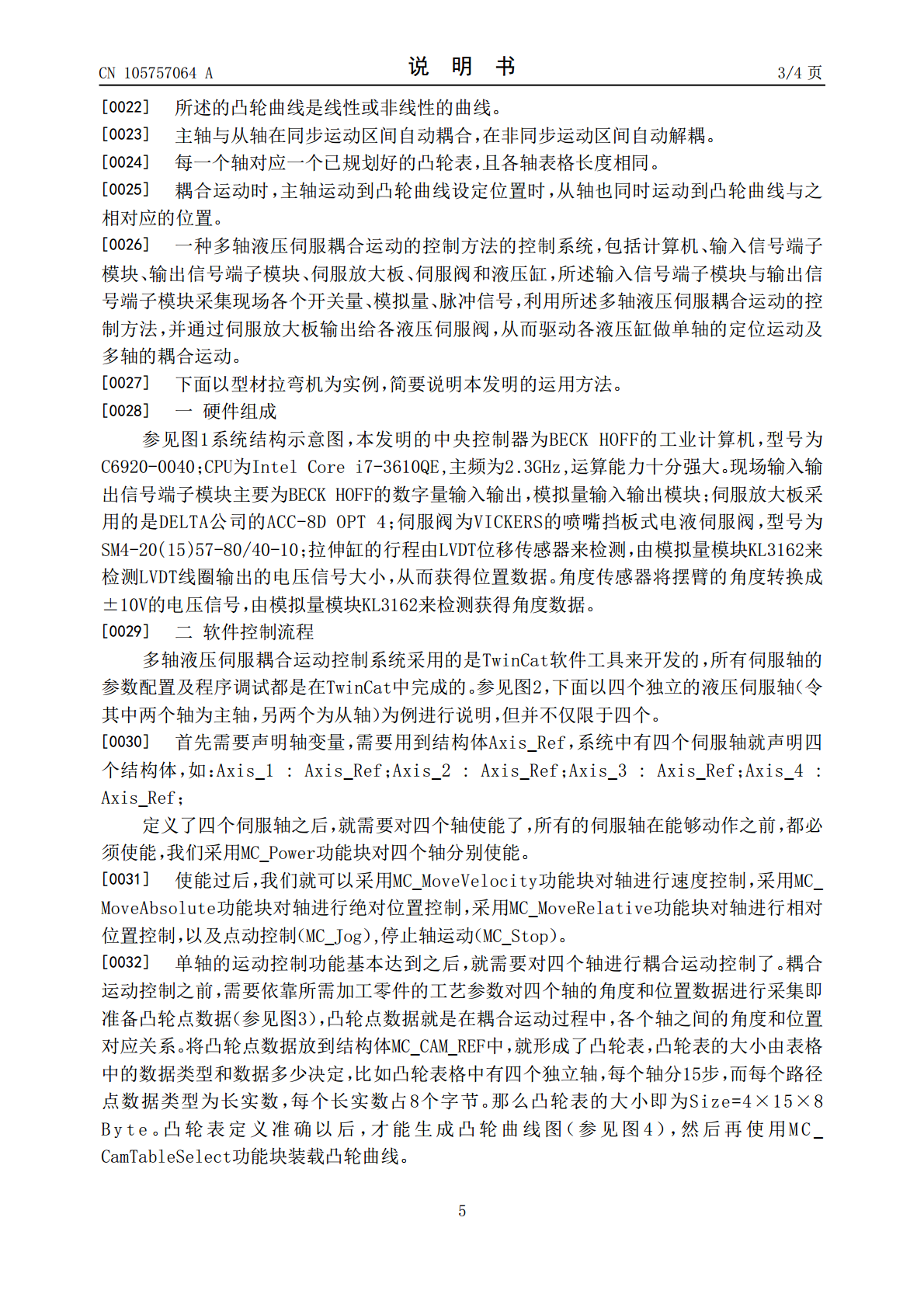
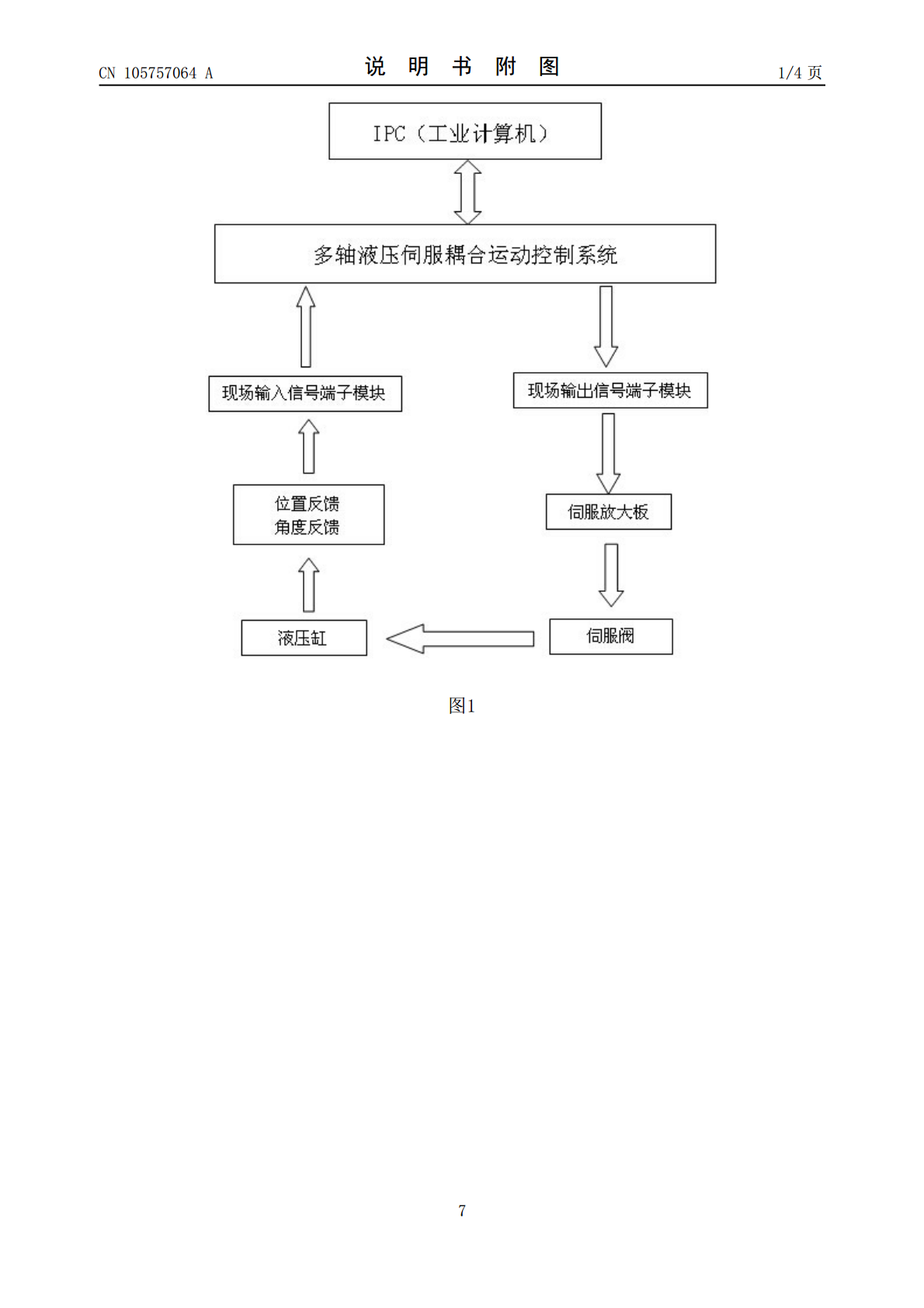
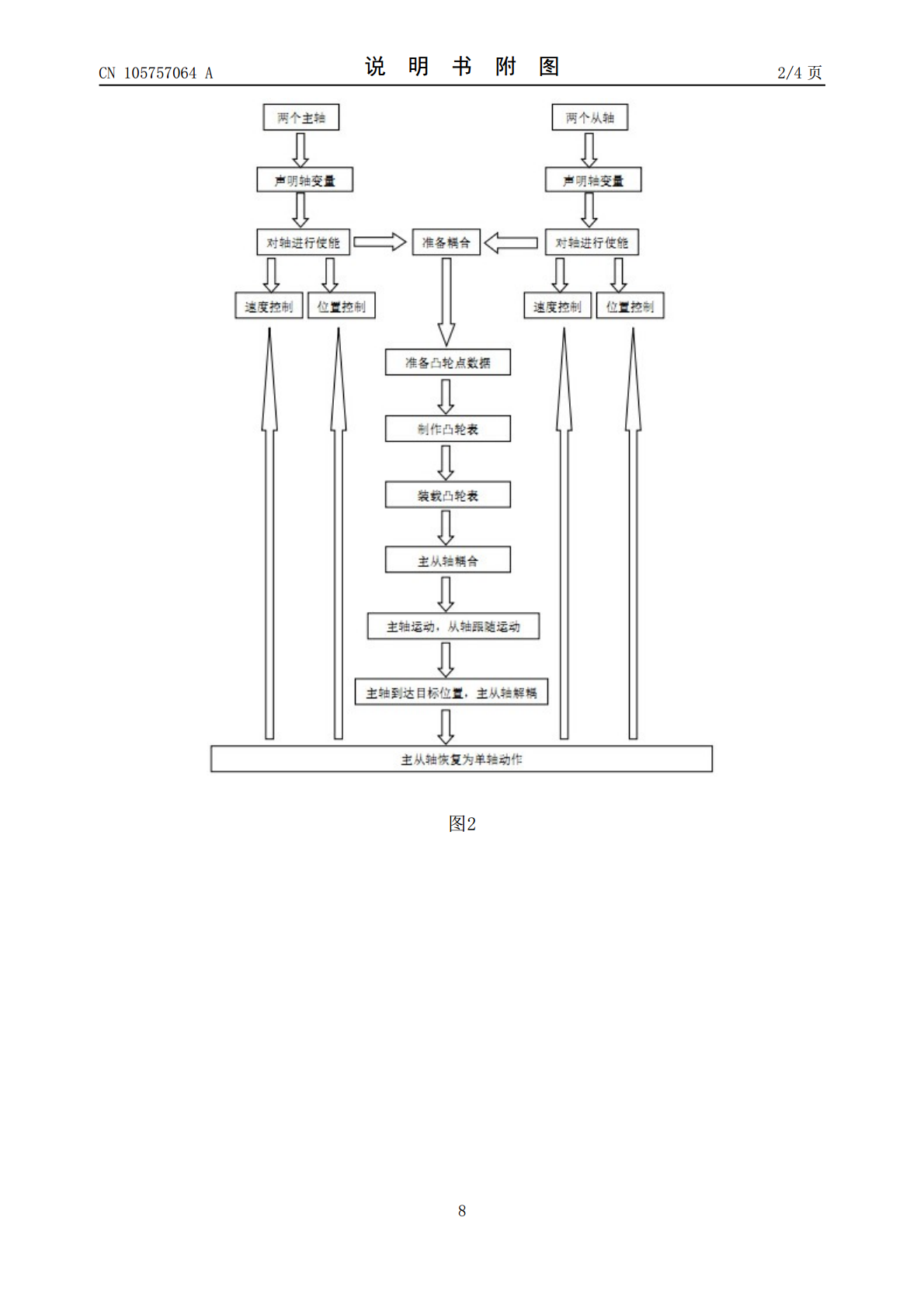
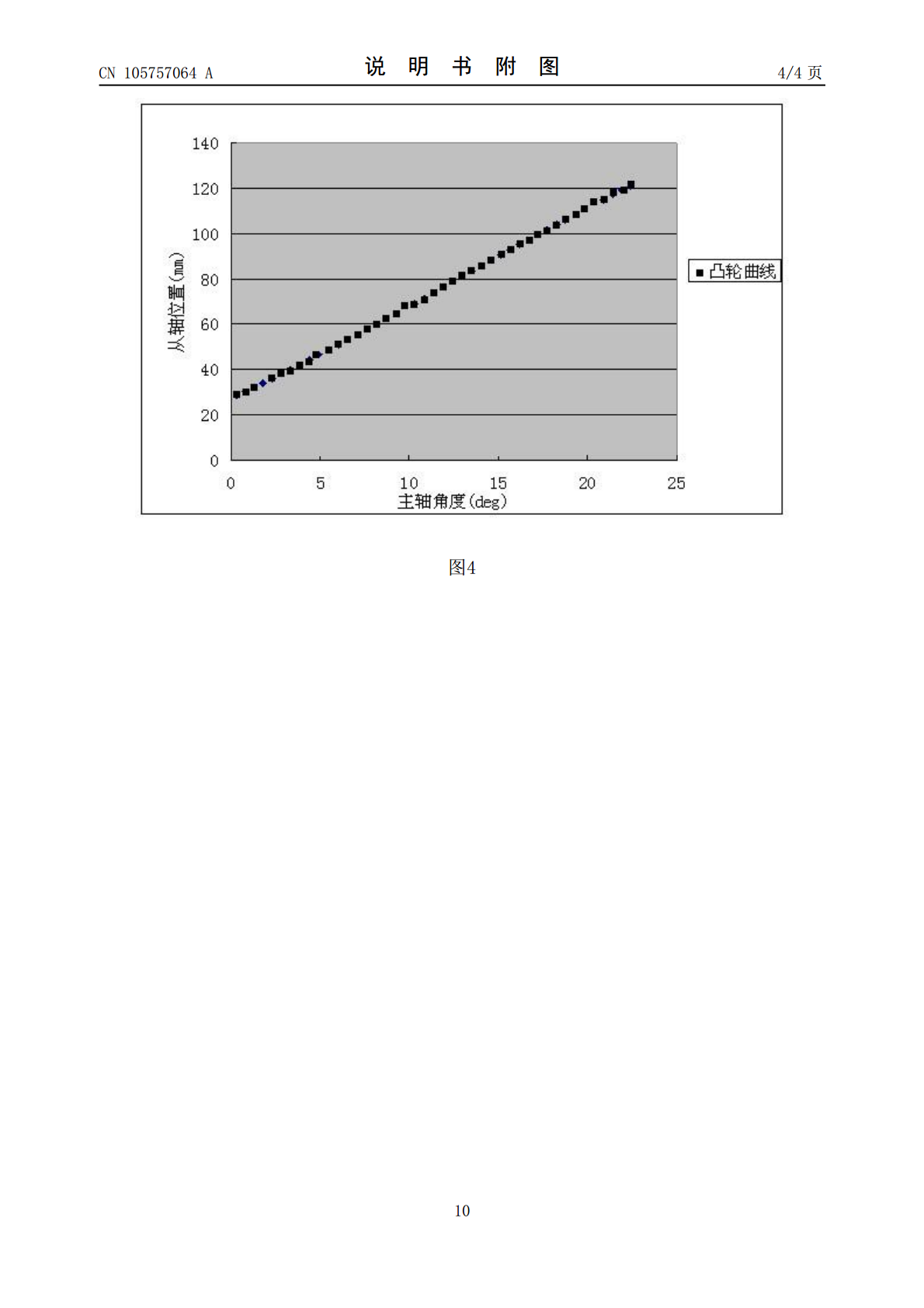
本发明公开了一种多轴液压伺服耦合运动的控制方法,包括如下步骤:(1)利用所需加工零件的工艺参数,采集运动过程中主轴与从轴的对应位置关系,并采集凸轮点数据;(2)将采集的凸轮点数据制作成凸轮表,生成凸轮曲线;(3)将主轴和从轴按照凸轮曲线进行耦合,所述的耦合方式为:主轴开始运动,从轴按照凸轮曲线对应位置跟随主轴运动;主轴运动到设定目标位置后,主从轴解耦并停止,恢复为单轴控制,本控制方法的运算处理是基于IPC(工业计算机)的实时内核,相对于传统基于PCI接口的运动控制器,本方法的运算能力有大幅度的提升。

基于偏差-环形耦合的多通道液压伺服系统同步控制.docx
基于偏差-环形耦合的多通道液压伺服系统同步控制基于偏差-环形耦合的多通道液压伺服系统同步控制摘要:多通道液压伺服系统广泛应用于工业领域,其同步控制是提高系统性能的关键。然而,在复杂的工作环境下,多通道液压伺服系统常常面临同步性能下降的问题。本文提出了一种基于偏差-环形耦合的多通道液压伺服系统同步控制方法。该方法通过引入偏差控制环,综合考虑系统总体误差和环形耦合误差,实现了多通道液压伺服系统的同步控制。本文详细介绍了该方法的理论基础和实施步骤,并通过仿真实验验证了该方法的有效性。关键词:多通道液压伺服系统;
一种多轴伺服驱动器控制装置.pdf
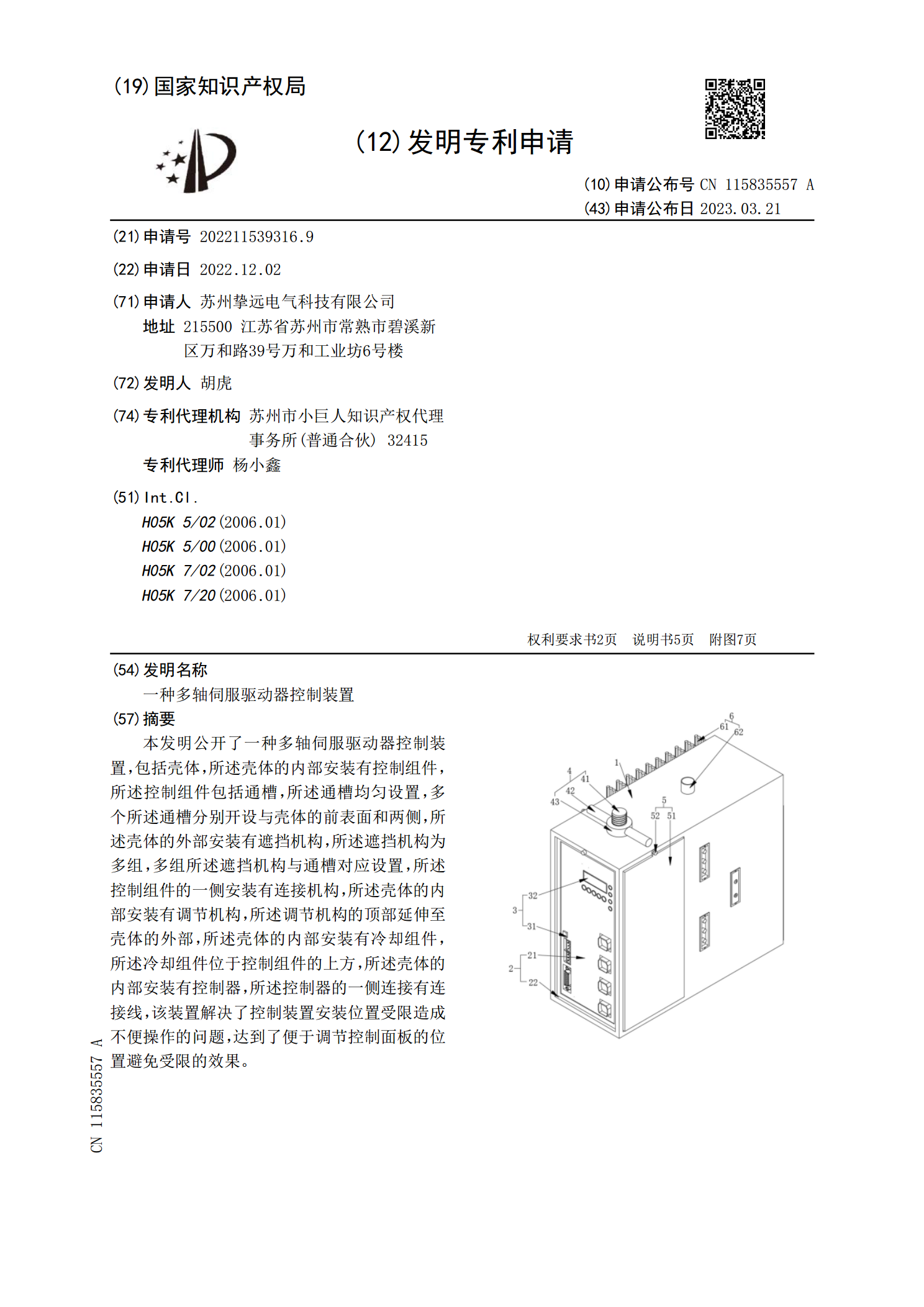
本发明公开了一种多轴伺服驱动器控制装置,包括壳体,所述壳体的内部安装有控制组件,所述控制组件包括通槽,所述通槽均匀设置,多个所述通槽分别开设与壳体的前表面和两侧,所述壳体的外部安装有遮挡机构,所述遮挡机构为多组,多组所述遮挡机构与通槽对应设置,所述控制组件的一侧安装有连接机构,所述壳体的内部安装有调节机构,所述调节机构的顶部延伸至壳体的外部,所述壳体的内部安装有冷却组件,所述冷却组件位于控制组件的上方,所述壳体的内部安装有控制器,所述控制器的一侧连接有连接线,该装置解决了控制装置安装位置受限造成不便操作的
多连杆凸轮双轴多工位伺服超高速机械手及运动控制方法.pdf
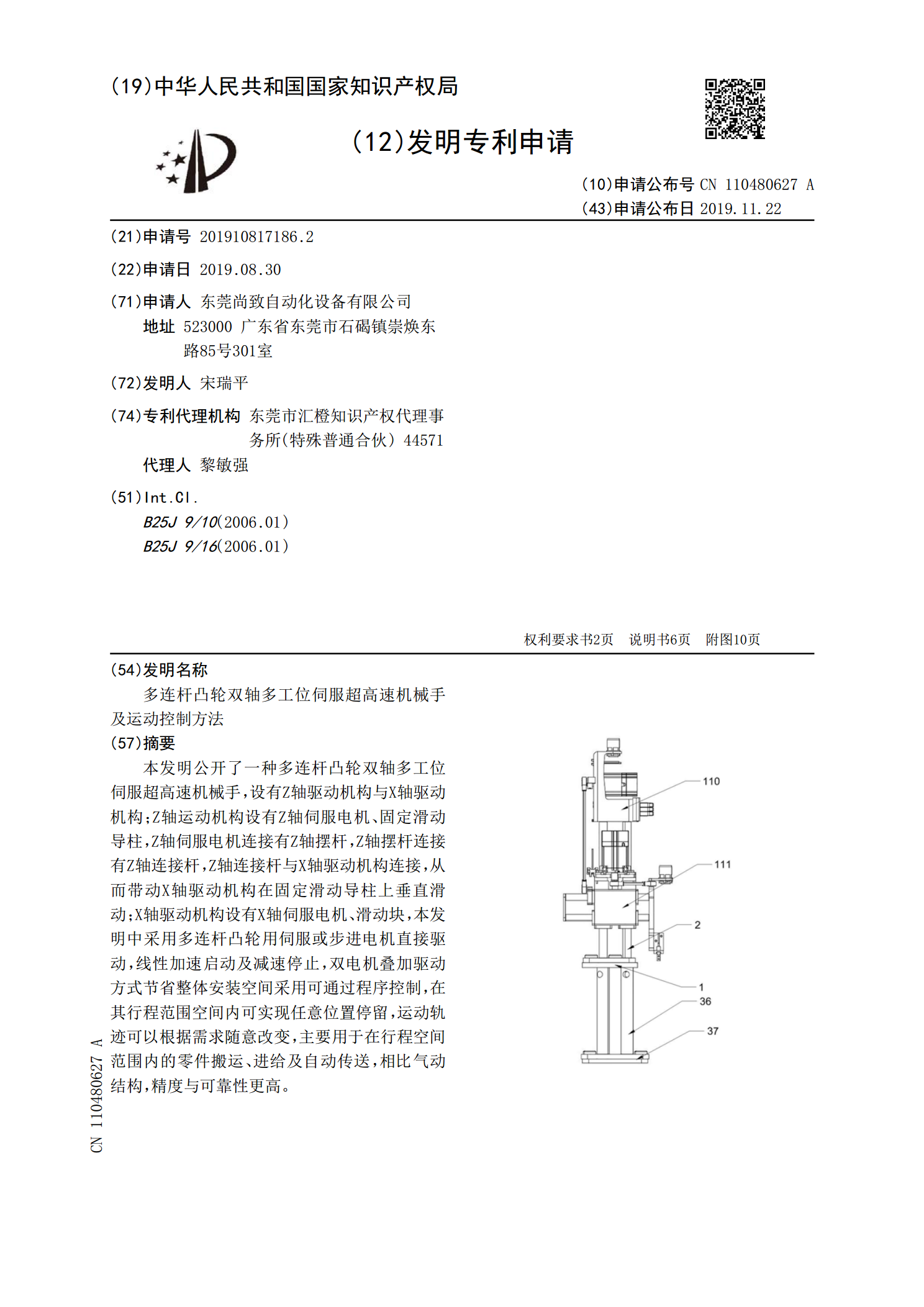
本发明公开了一种多连杆凸轮双轴多工位伺服超高速机械手,设有Z轴驱动机构与X轴驱动机构;Z轴运动机构设有Z轴伺服电机、固定滑动导柱,Z轴伺服电机连接有Z轴摆杆,Z轴摆杆连接有Z轴连接杆,Z轴连接杆与X轴驱动机构连接,从而带动X轴驱动机构在固定滑动导柱上垂直滑动;X轴驱动机构设有X轴伺服电机、滑动块,本发明中采用多连杆凸轮用伺服或步进电机直接驱动,线性加速启动及减速停止,双电机叠加驱动方式节省整体安装空间采用可通过程序控制,在其行程范围空间内可实现任意位置停留,运动轨迹可以根据需求随意改变,主要用于在行程空间

多轴机械臂关节伺服系统的控制方法及系统.pdf
本申请提供一种多轴机械臂关节伺服系统的控制方法及系统,应用于机器人及其伺服技术领域,其中控制方法包括构建机械臂中各关节的伺服系统对应的加速度反馈闭环传递函数;从所述机械臂在工作期间容许的负载惯量的变化范围,按预设的选取策略确定各关节的伺服系统对应的负载惯量比R值;根据各轴加速度增益值具有最小增益偏差的约束关系,求解出各关节的伺服系统对应的加速度反馈增益k值;将各关节的伺服系统对应的负载惯量比R值及加速度反馈增益k值,用于该关节的伺服系统对应的所述加速度反馈闭环传递函数中。通过从机械臂整体结构的惯量变化角度