
多连杆凸轮双轴多工位伺服超高速机械手及运动控制方法.pdf

春兰****89

1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多连杆凸轮双轴多工位伺服超高速机械手及运动控制方法.pdf
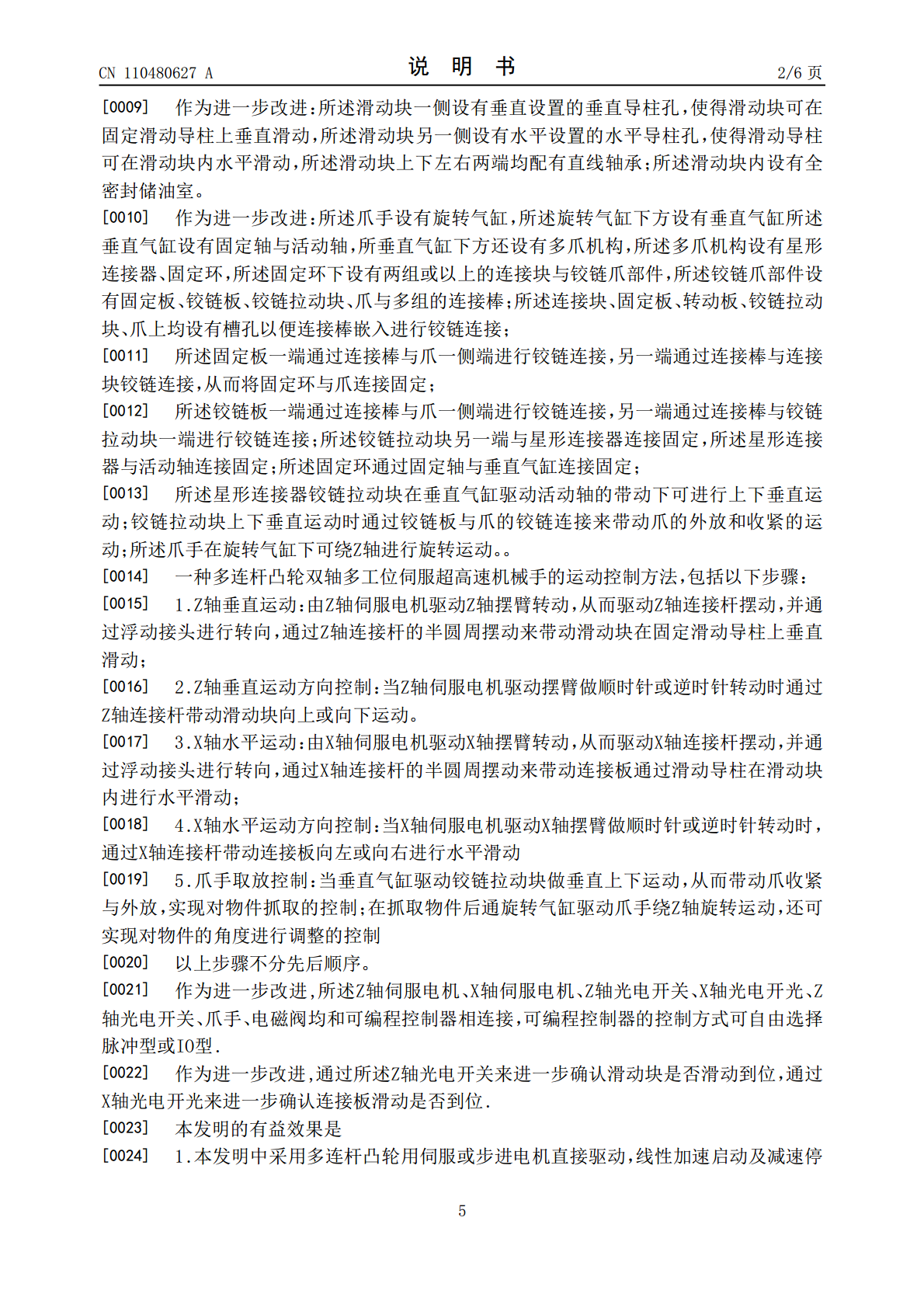
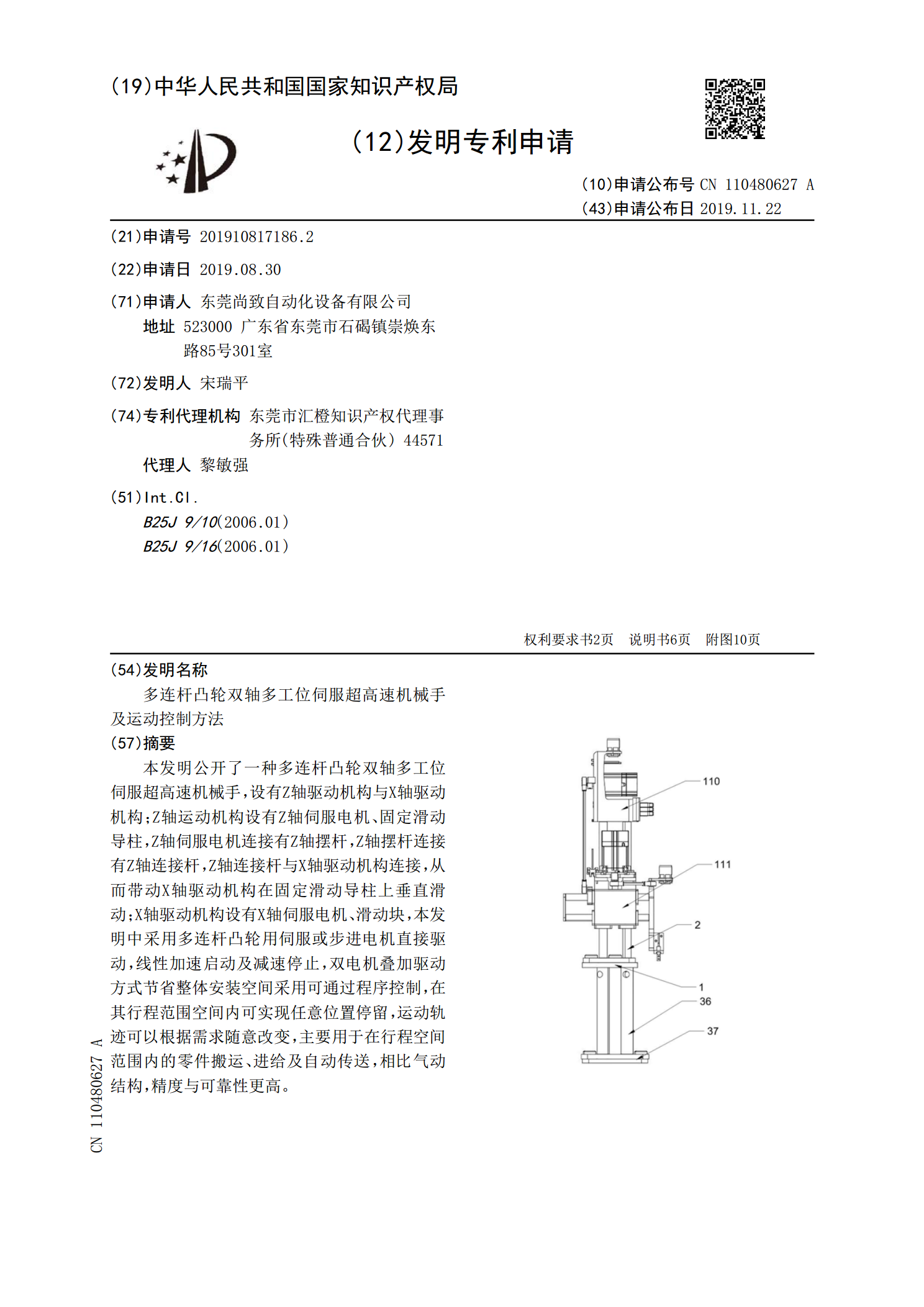
本发明公开了一种多连杆凸轮双轴多工位伺服超高速机械手,设有Z轴驱动机构与X轴驱动机构;Z轴运动机构设有Z轴伺服电机、固定滑动导柱,Z轴伺服电机连接有Z轴摆杆,Z轴摆杆连接有Z轴连接杆,Z轴连接杆与X轴驱动机构连接,从而带动X轴驱动机构在固定滑动导柱上垂直滑动;X轴驱动机构设有X轴伺服电机、滑动块,本发明中采用多连杆凸轮用伺服或步进电机直接驱动,线性加速启动及减速停止,双电机叠加驱动方式节省整体安装空间采用可通过程序控制,在其行程范围空间内可实现任意位置停留,运动轨迹可以根据需求随意改变,主要用于在行程空间

一种多轴液压伺服耦合运动的控制方法.pdf
本发明公开了一种多轴液压伺服耦合运动的控制方法,包括如下步骤:(1)利用所需加工零件的工艺参数,采集运动过程中主轴与从轴的对应位置关系,并采集凸轮点数据;(2)将采集的凸轮点数据制作成凸轮表,生成凸轮曲线;(3)将主轴和从轴按照凸轮曲线进行耦合,所述的耦合方式为:主轴开始运动,从轴按照凸轮曲线对应位置跟随主轴运动;主轴运动到设定目标位置后,主从轴解耦并停止,恢复为单轴控制,本控制方法的运算处理是基于IPC(工业计算机)的实时内核,相对于传统基于PCI接口的运动控制器,本方法的运算能力有大幅度的提升。
一种多连杆伺服压力机运动控制方法及系统.pdf
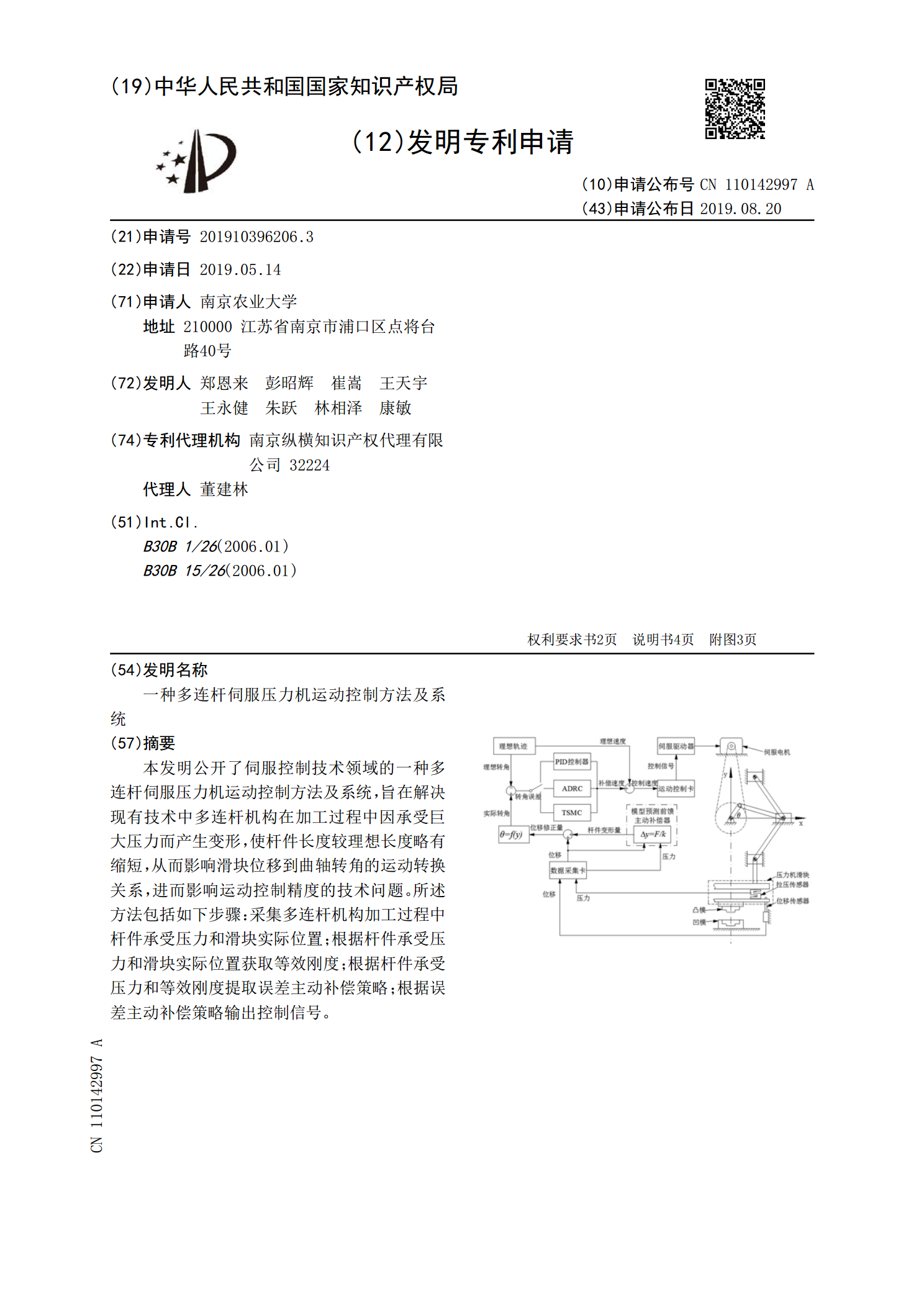
本发明公开了伺服控制技术领域的一种多连杆伺服压力机运动控制方法及系统,旨在解决现有技术中多连杆机构在加工过程中因承受巨大压力而产生变形,使杆件长度较理想长度略有缩短,从而影响滑块位移到曲轴转角的运动转换关系,进而影响运动控制精度的技术问题。所述方法包括如下步骤:采集多连杆机构加工过程中杆件承受压力和滑块实际位置;根据杆件承受压力和滑块实际位置获取等效刚度;根据杆件承受压力和等效刚度提取误差主动补偿策略;根据误差主动补偿策略输出控制信号。

多工位凸轮搬运机构.pdf
本发明公开了一种多工位凸轮搬运机构,包括底板、设置在所述底板中部的转轴、与所述转轴底部驱动连接的电机、设置于所述转轴上部的转盘、设置在所述底板上的安装架、设置在所述安装架上的安装板、沿凸轮轨迹开设在所述安装板底面上的环形状的滑槽及多个呈环形均匀间隔布置的底部滑动设置在所述转盘上且顶部滑动设置在所述滑槽内的抓取移栽组件。本发明的多工位凸轮搬运机构,通过电机驱动多个工位同时进行产品搬运,抓取移栽组件沿凸轮轨迹往复运动的同时,抓取移栽组件上的抓爪上下往复运动进行产品抓取和移栽,将产品由一个工位依次移栽到下一工位

双转子壳体转动凸轮连杆滚柱多速马达.pdf
本发明公开一种双转子壳体转动凸轮连杆滚柱多速马达。所述定子Ⅰ(7)由左轴承(9)和右轴承(15)安装在外转子Ⅰ(3)的型腔内,外转子Ⅰ(3)由紧固螺栓(14)安置在右端盖(1)和左端盖(5)之间,内转子Ⅰ(20)由小轴承(21)、轴承端盖(17)通过紧固螺栓(16)安装在定子Ⅰ(7)的右侧端面上,内转子(20)的前部位于定子Ⅰ(7)的型腔中,定子Ⅰ(7)的两个半圆环体(25)之间形成的滑槽中装有滑块组(22)。本发明具有工作平稳、体积小、重量轻、效率高、比功率大等优点,本发明在一个壳体内设置内、外多个不同