
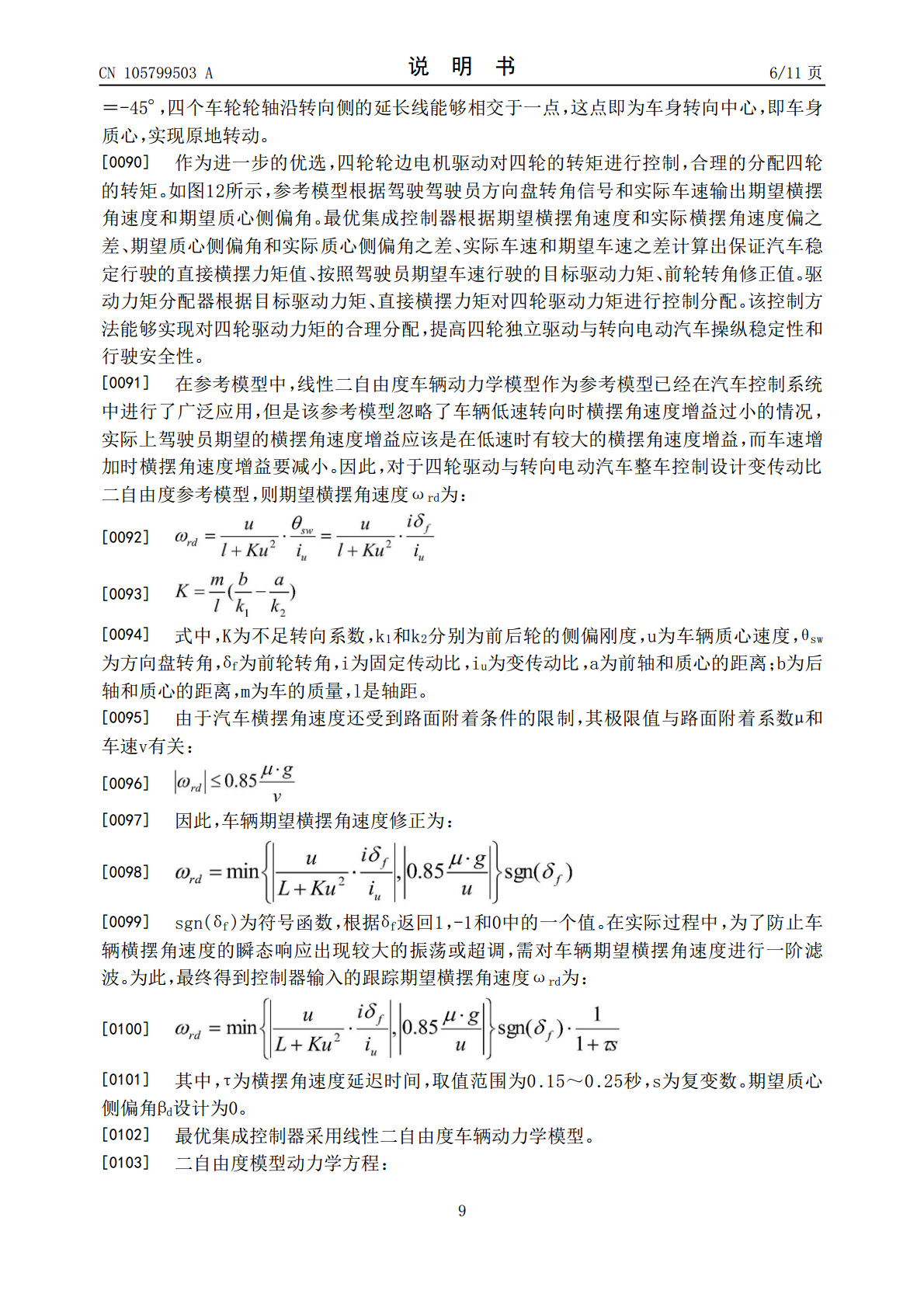
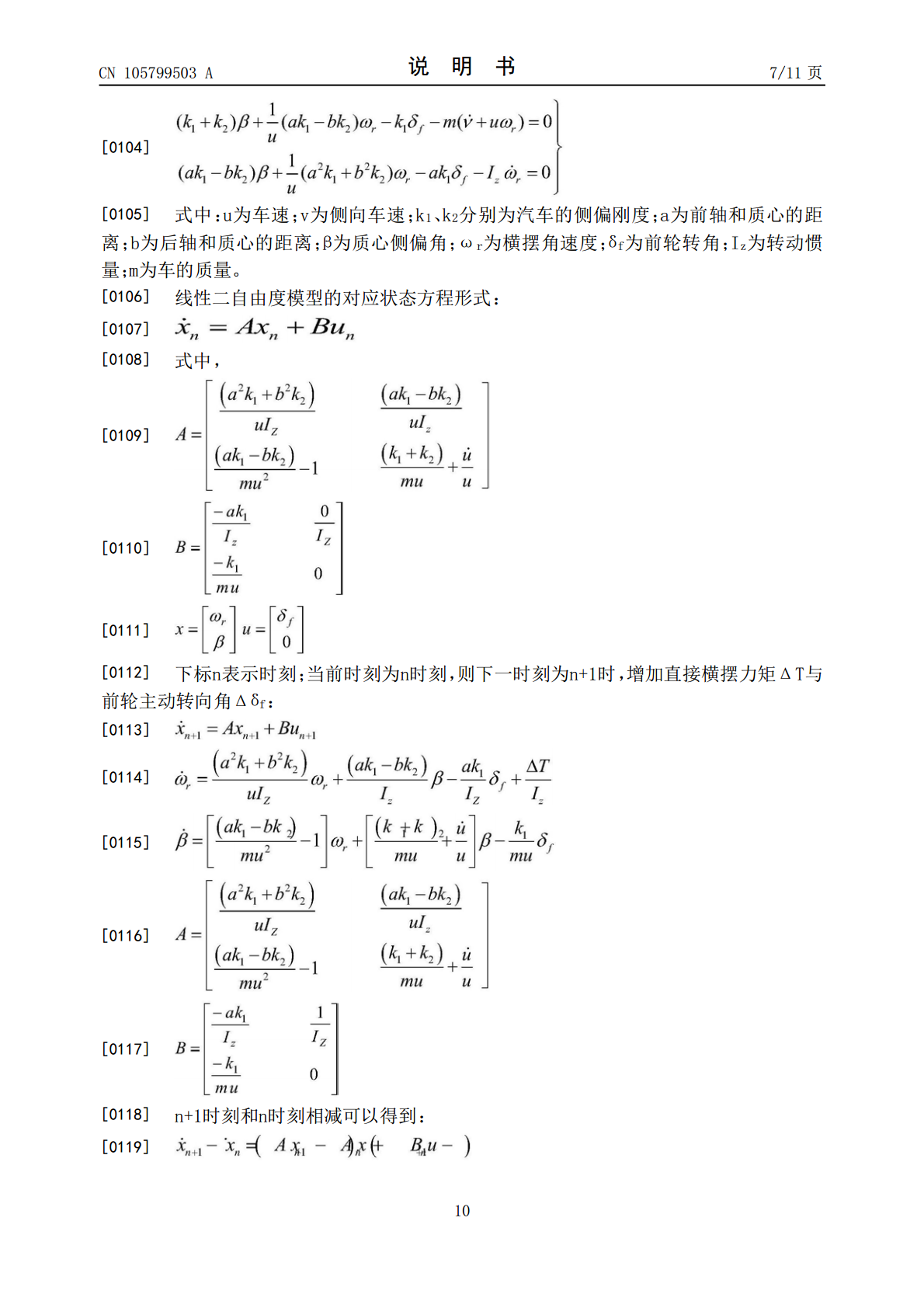
具有四轮轮边电机驱动和四轮独立转向的电动汽车底盘总成和控制方法.pdf

努力****向丝

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

具有四轮轮边电机驱动和四轮独立转向的电动汽车底盘总成和控制方法.pdf
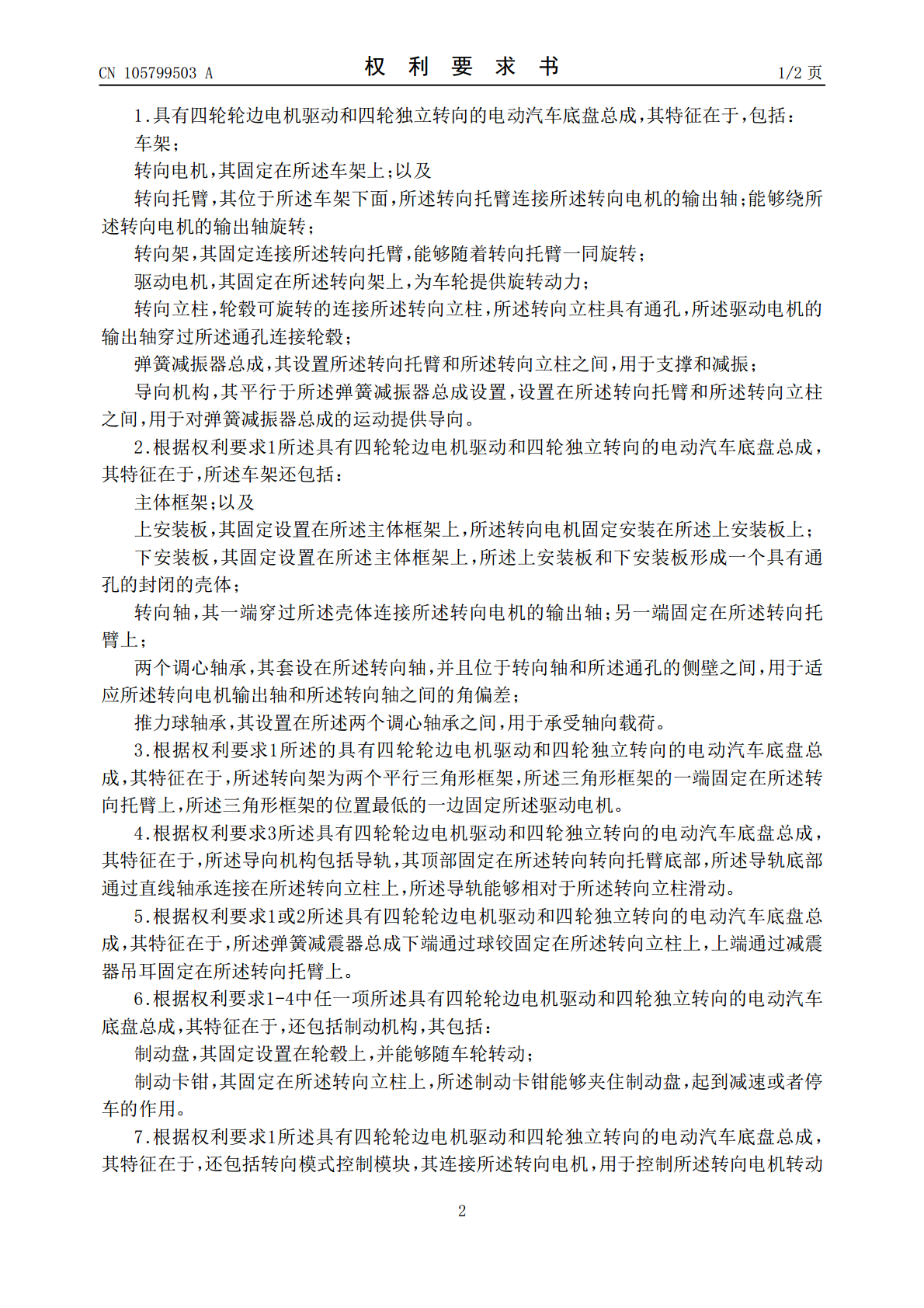
本发明公开了具有四轮轮边电机驱动和四轮独立转向的电动汽车底盘总成,包括:车架;转向电机,其固定在车架上;以及转向托臂,能够绕转向电机的输出轴旋转;转向架,能够随着转向托臂一同旋转;驱动电机,转向立柱,轮毂可旋转的连接转向立柱,弹簧减振器总成,其设置转向托臂和转向立柱之间,用于对转向托臂支撑和减振;导向机构,用于对弹簧减振器总成运动提供导向,本发明采用轮边电机驱动汽车转向并将轮边电机设计成为簧上质量,提高汽车行驶平顺性和动力性,采用轮边电机控制驱动四轮驱动转矩,能够实现在不同车轮间的驱动转矩合理分配。
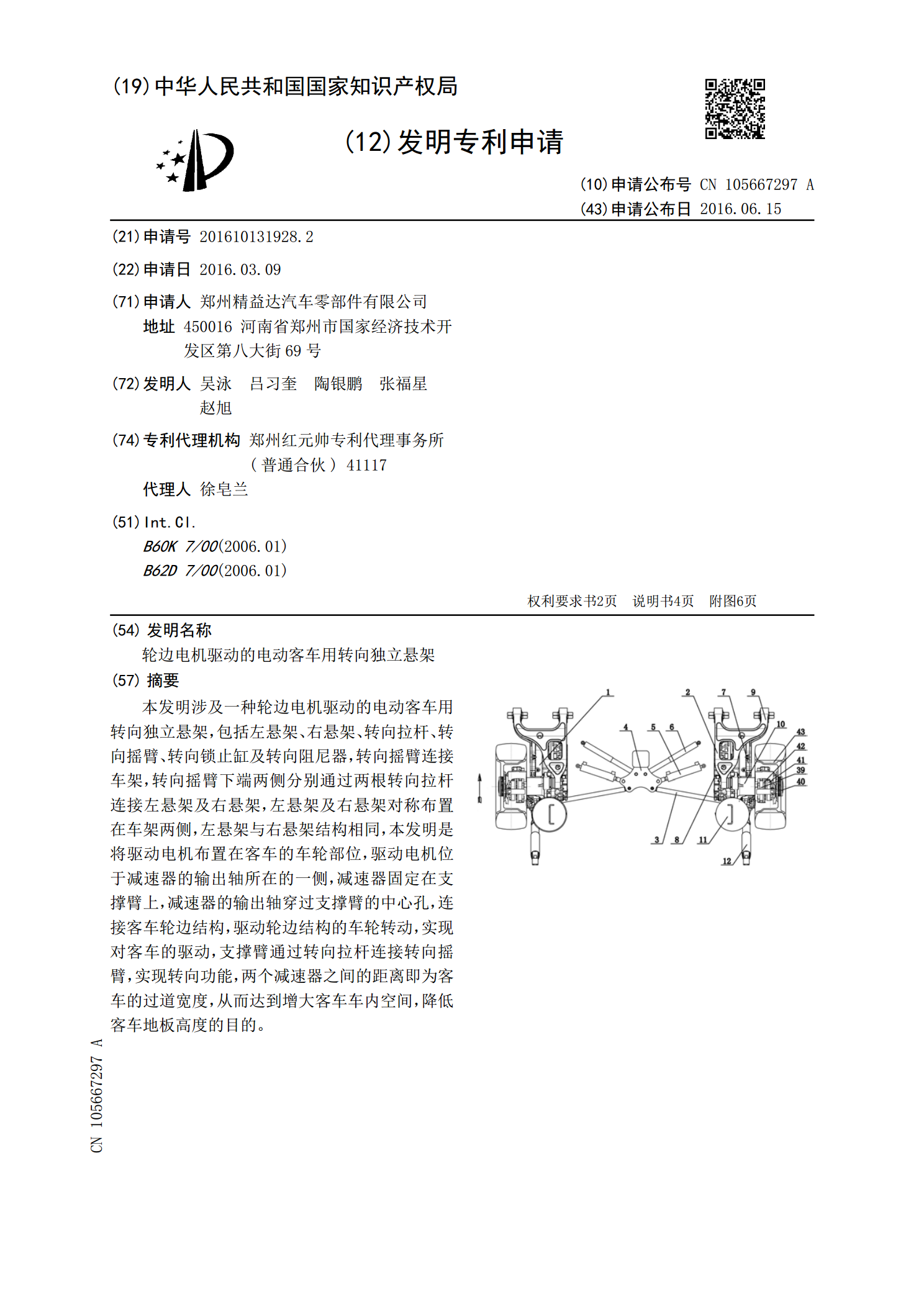
轮边电机驱动的电动客车用转向独立悬架.pdf
本发明涉及一种轮边电机驱动的电动客车用转向独立悬架,包括左悬架、右悬架、转向拉杆、转向摇臂、转向锁止缸及转向阻尼器,转向摇臂连接车架,转向摇臂下端两侧分别通过两根转向拉杆连接左悬架及右悬架,左悬架及右悬架对称布置在车架两侧,左悬架与右悬架结构相同,本发明是将驱动电机布置在客车的车轮部位,驱动电机位于减速器的输出轴所在的一侧,减速器固定在支撑臂上,减速器的输出轴穿过支撑臂的中心孔,连接客车轮边结构,驱动轮边结构的车轮转动,实现对客车的驱动,支撑臂通过转向拉杆连接转向摇臂,实现转向功能,两个减速器之间的距离即
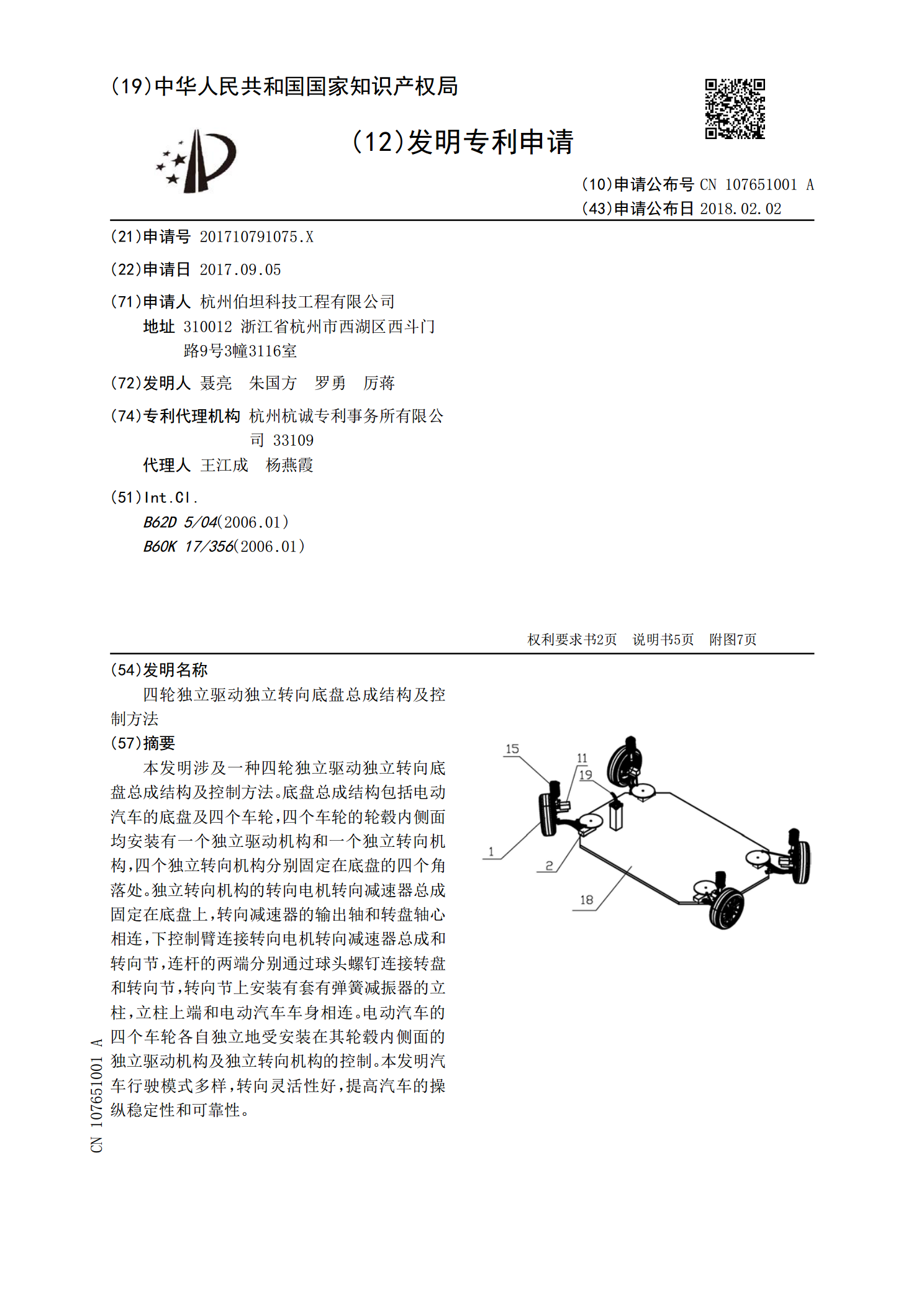
四轮独立驱动独立转向底盘总成结构及控制方法.pdf
本发明涉及一种四轮独立驱动独立转向底盘总成结构及控制方法。底盘总成结构包括电动汽车的底盘及四个车轮,四个车轮的轮毂内侧面均安装有一个独立驱动机构和一个独立转向机构,四个独立转向机构分别固定在底盘的四个角落处。独立转向机构的转向电机转向减速器总成固定在底盘上,转向减速器的输出轴和转盘轴心相连,下控制臂连接转向电机转向减速器总成和转向节,连杆的两端分别通过球头螺钉连接转盘和转向节,转向节上安装有套有弹簧减振器的立柱,立柱上端和电动汽车车身相连。电动汽车的四个车轮各自独立地受安装在其轮毂内侧面的独立驱动机构及独

具备独立转向和轮边驱动的汽车单轮装置及控制方法.pdf
本发明涉及一种具备独立转向和轮边驱动的汽车单轮装置及控制方法。汽车单轮装置包括转向电机、转向架、轮边驱动电机和汽车单轮,转向电机安装在汽车车架底盘上,转向架设在汽车车架底盘的下方,转向架的外端设有法兰盘,转向电机的输出轴和法兰盘相连,轮边驱动电机安装在转向架的内端的下方,轮边驱动电机的输出轴和汽车单轮之间连接有传动机构。控制方法为:每个汽车单轮的驱动受各自的轮边驱动电机独立控制,每个汽车单轮的转向受各自的转向电机独立控制,使汽车实现蟹行、原地转向及斜行行驶。本发明能精确控制每个车轮的驱动力,灵活调整每个车

各轮独立转向及驱动的电动汽车及其转向与驱动控制方法.pdf
一种各轮独立转向及驱动的电动汽车及其转向与驱动方法,该电动汽车包括车身、悬架系统、车轮转向系统、若干个车轮总成及驱动控制系统。车轮转向系统包括转向操纵装置、转向控制子系统及数量与车轮总成相同且通过悬架系统装于车身上的转向机构,悬架系统外侧及前后两端留有避位空间,各转向机构包括主销杆及车轮轴,转向控制子系统包括转向控制器、设于主销杆顶端且与主销杆传动连接的转向舵机及转向传感器;各车轮总成包括装于车轮轴上的车轮及轮毂电机;驱动控制系统包括车速控制踏板及控制轮毂电机的驱动控制器。本发明在各车轮处均装有转向舵机及