
一种机床平面轮廓误差单目测量方法.pdf

宛菡****魔王

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机床平面轮廓误差单目测量方法.pdf
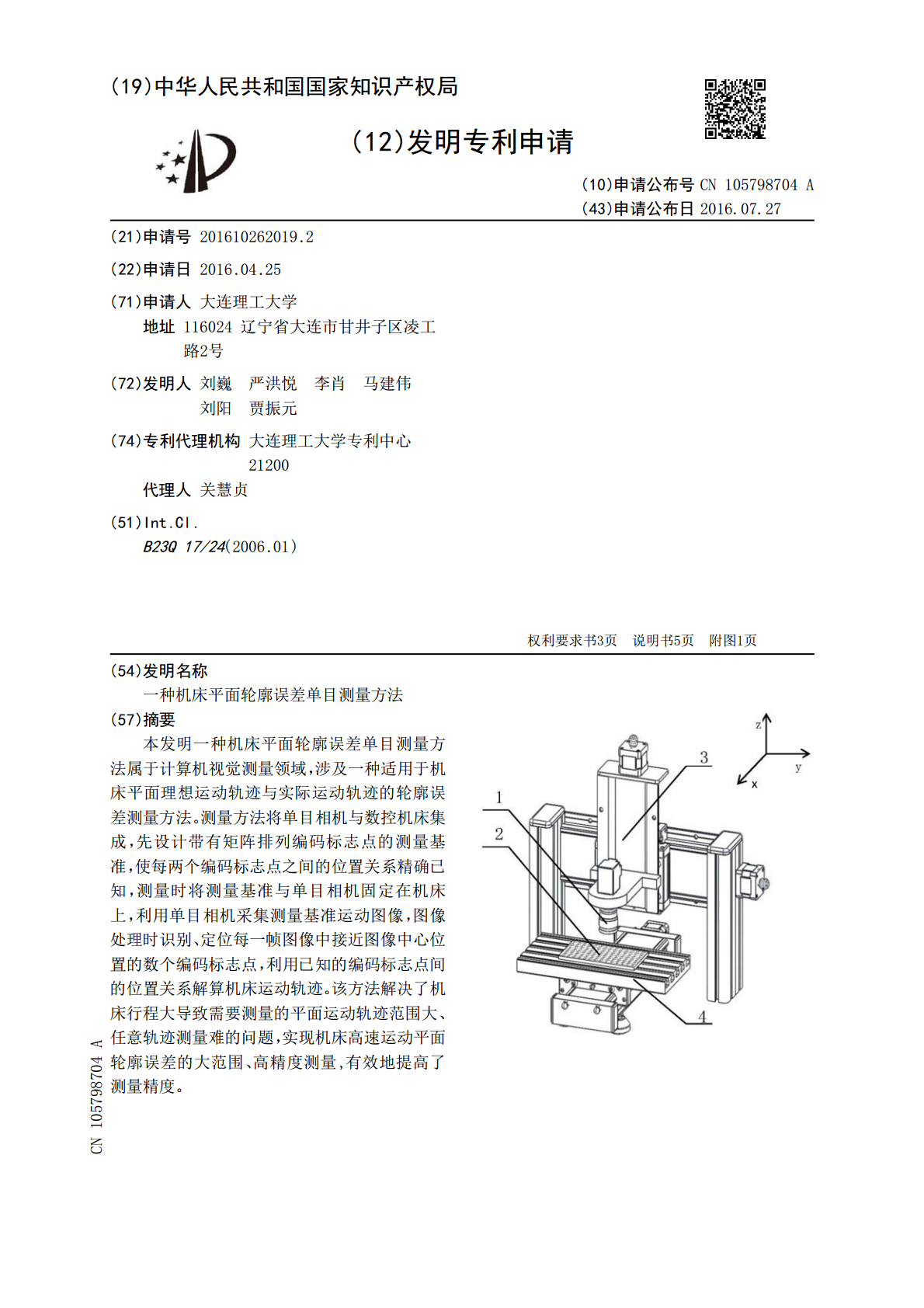
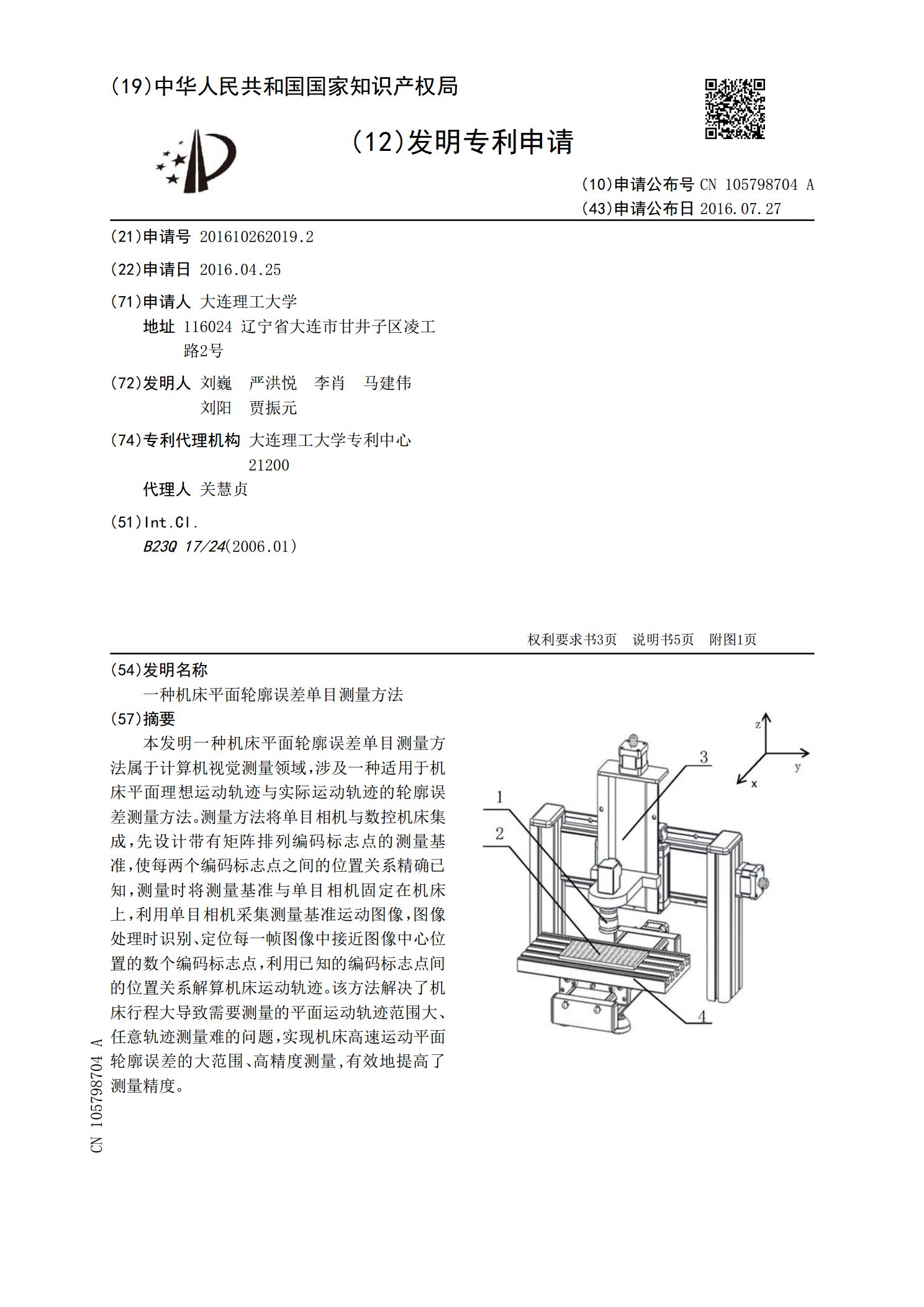
本发明一种机床平面轮廓误差单目测量方法属于计算机视觉测量领域,涉及一种适用于机床平面理想运动轨迹与实际运动轨迹的轮廓误差测量方法。测量方法将单目相机与数控机床集成,先设计带有矩阵排列编码标志点的测量基准,使每两个编码标志点之间的位置关系精确已知,测量时将测量基准与单目相机固定在机床上,利用单目相机采集测量基准运动图像,图像处理时识别、定位每一帧图像中接近图像中心位置的数个编码标志点,利用已知的编码标志点间的位置关系解算机床运动轨迹。该方法解决了机床行程大导致需要测量的平面运动轨迹范围大、任意轨迹测量难的问
数控机床高动态大范围任意轮廓误差单目六维测量方法.pdf
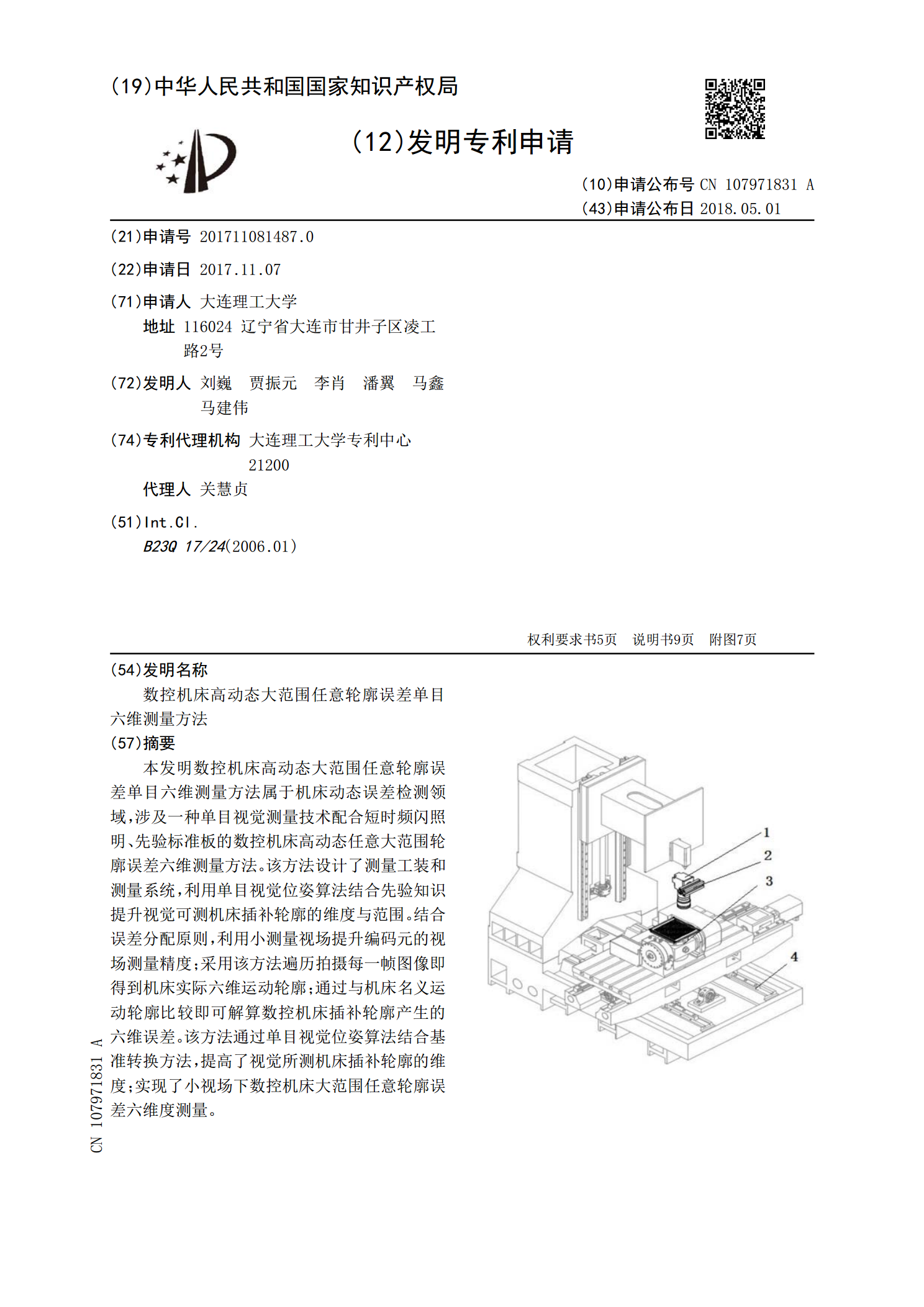
本发明数控机床高动态大范围任意轮廓误差单目六维测量方法属于机床动态误差检测领域,涉及一种单目视觉测量技术配合短时频闪照明、先验标准板的数控机床高动态任意大范围轮廓误差六维测量方法。该方法设计了测量工装和测量系统,利用单目视觉位姿算法结合先验知识提升视觉可测机床插补轮廓的维度与范围。结合误差分配原则,利用小测量视场提升编码元的视场测量精度;采用该方法遍历拍摄每一帧图像即得到机床实际六维运动轮廓;通过与机床名义运动轮廓比较即可解算数控机床插补轮廓产生的六维误差。该方法通过单目视觉位姿算法结合基准转换方法,提高

基于单目视觉的数控机床轮廓误差三维测量方法.pdf
本发明基于单目视觉的数控机床轮廓误差三维测量方法属于计算机视觉测量技术领域,涉及一种基于单目视觉的轮廓误差数控机床三维测量方法。该方法首先将单目相机安装在测量系统安装架上,并位于机床工作台的斜上方。结合张正友标定法与高精度棋盘格标定板,标定单目相机的内参数与畸变参数。标定后安装测量基准,驱使机床运行生成动态轨迹,同时触发单目相机拍摄测量基准上的四个编码点的运动序列图像,利用迭代算法对每帧图像进行数据处理计算基准点空间坐标,将处理算法遍历每帧图像后连接基准点即可得到相机坐标系下机床运动轨迹。随后将此轨迹投影

一种凸轮轮廓的误差在线测量方法.pdf
本发明属于测量方法类,具体是一种凸轮轮廓的误差在线测量方法,其特征在于:将测量头由测量头座安装在砂轮架导轨上,测量头的垂直面紧靠待测凸轮外表面,砂轮架导轨上装有光栅尺,测量头上装有位置测量装置,凸轮轴上装有编码器,旋转凸轮轴,并同步移动砂轮架导轨,使凸轮轴旋转与砂轮架导轨移动符合凸轮的转角-升程曲线,带动测量头座水平移动,测出凸轮在各个角度上的砂轮架导轨光栅尺显示的砂轮架位置尺寸与测量头上位置测量装置显示的位置尺寸,并将两者相加,即可得出实际的凸轮转角-升程曲线,与要求的转角-升程曲线相比较,
一种脱离基准平面的平面度误差测量方法.pdf
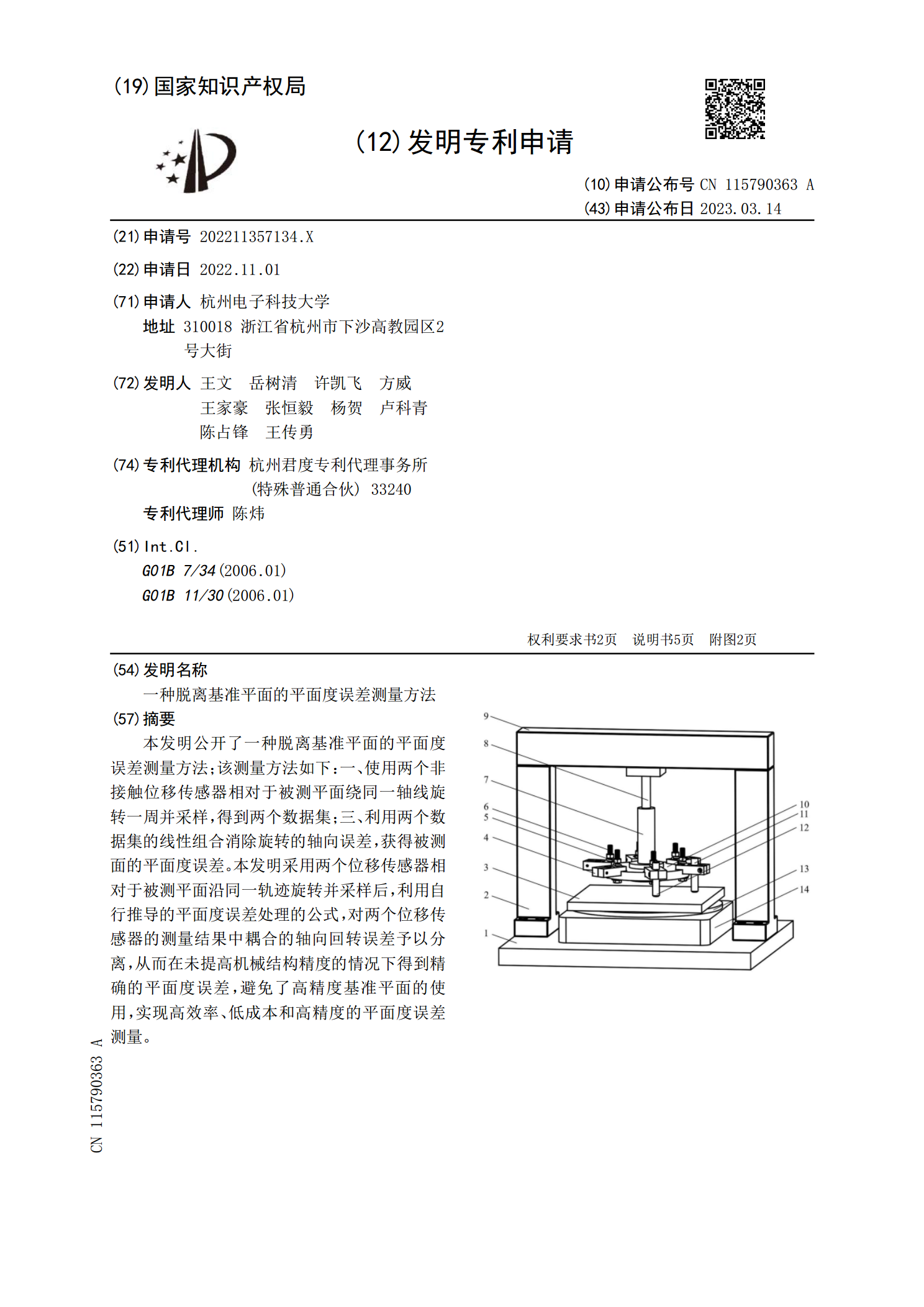
本发明公开了一种脱离基准平面的平面度误差测量方法;该测量方法如下:一、使用两个非接触位移传感器相对于被测平面绕同一轴线旋转一周并采样,得到两个数据集;三、利用两个数据集的线性组合消除旋转的轴向误差,获得被测面的平面度误差。本发明采用两个位移传感器相对于被测平面沿同一轨迹旋转并采样后,利用自行推导的平面度误差处理的公式,对两个位移传感器的测量结果中耦合的轴向回转误差予以分离,从而在未提高机械结构精度的情况下得到精确的平面度误差,避免了高精度基准平面的使用,实现高效率、低成本和高精度的平面度误差测量。