
基于单目视觉的数控机床轮廓误差三维测量方法.pdf

雅云****彩妍


1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于单目视觉的数控机床轮廓误差三维测量方法.pdf
本发明基于单目视觉的数控机床轮廓误差三维测量方法属于计算机视觉测量技术领域,涉及一种基于单目视觉的轮廓误差数控机床三维测量方法。该方法首先将单目相机安装在测量系统安装架上,并位于机床工作台的斜上方。结合张正友标定法与高精度棋盘格标定板,标定单目相机的内参数与畸变参数。标定后安装测量基准,驱使机床运行生成动态轨迹,同时触发单目相机拍摄测量基准上的四个编码点的运动序列图像,利用迭代算法对每帧图像进行数据处理计算基准点空间坐标,将处理算法遍历每帧图像后连接基准点即可得到相机坐标系下机床运动轨迹。随后将此轨迹投影
数控机床高动态大范围任意轮廓误差单目六维测量方法.pdf
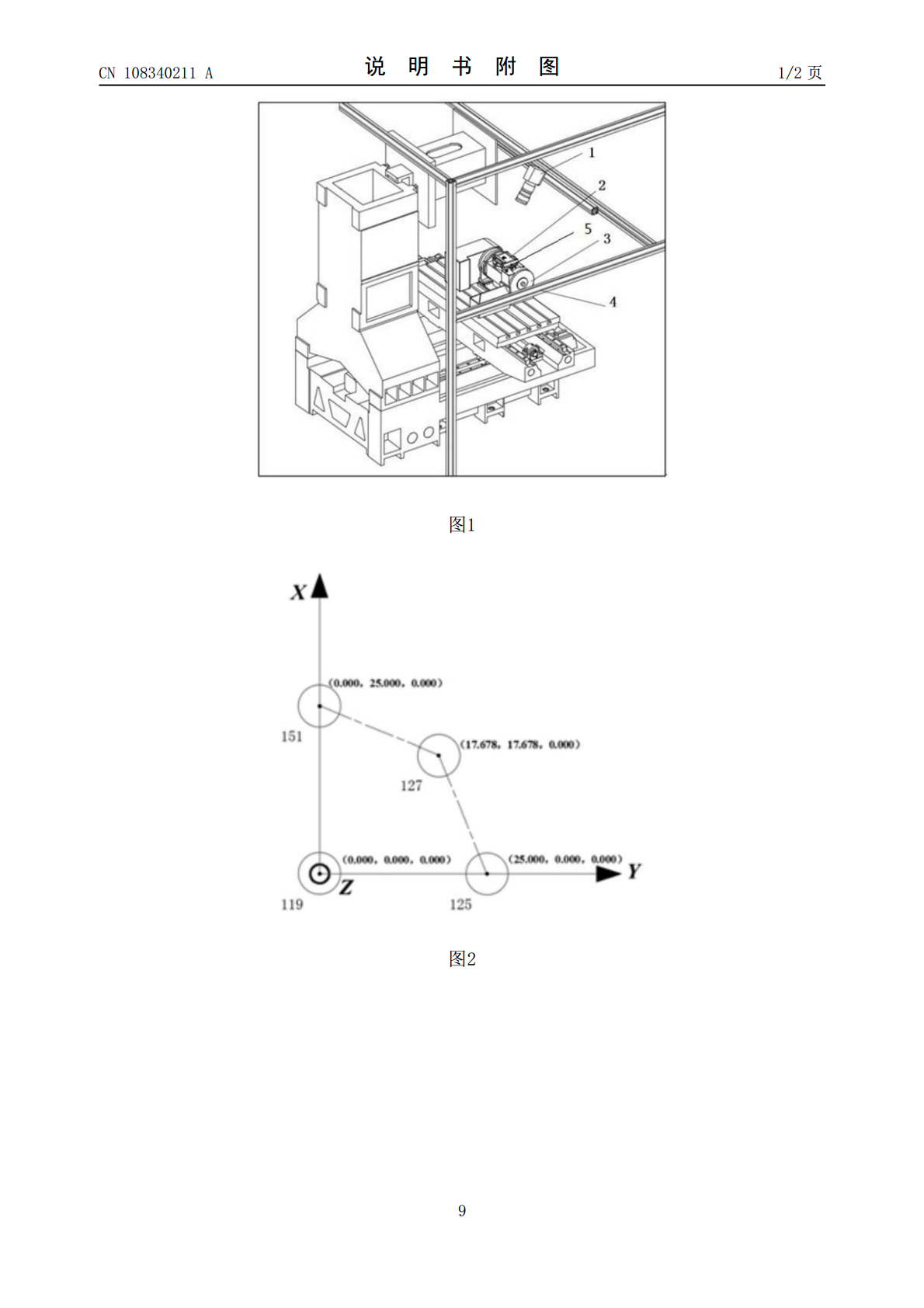
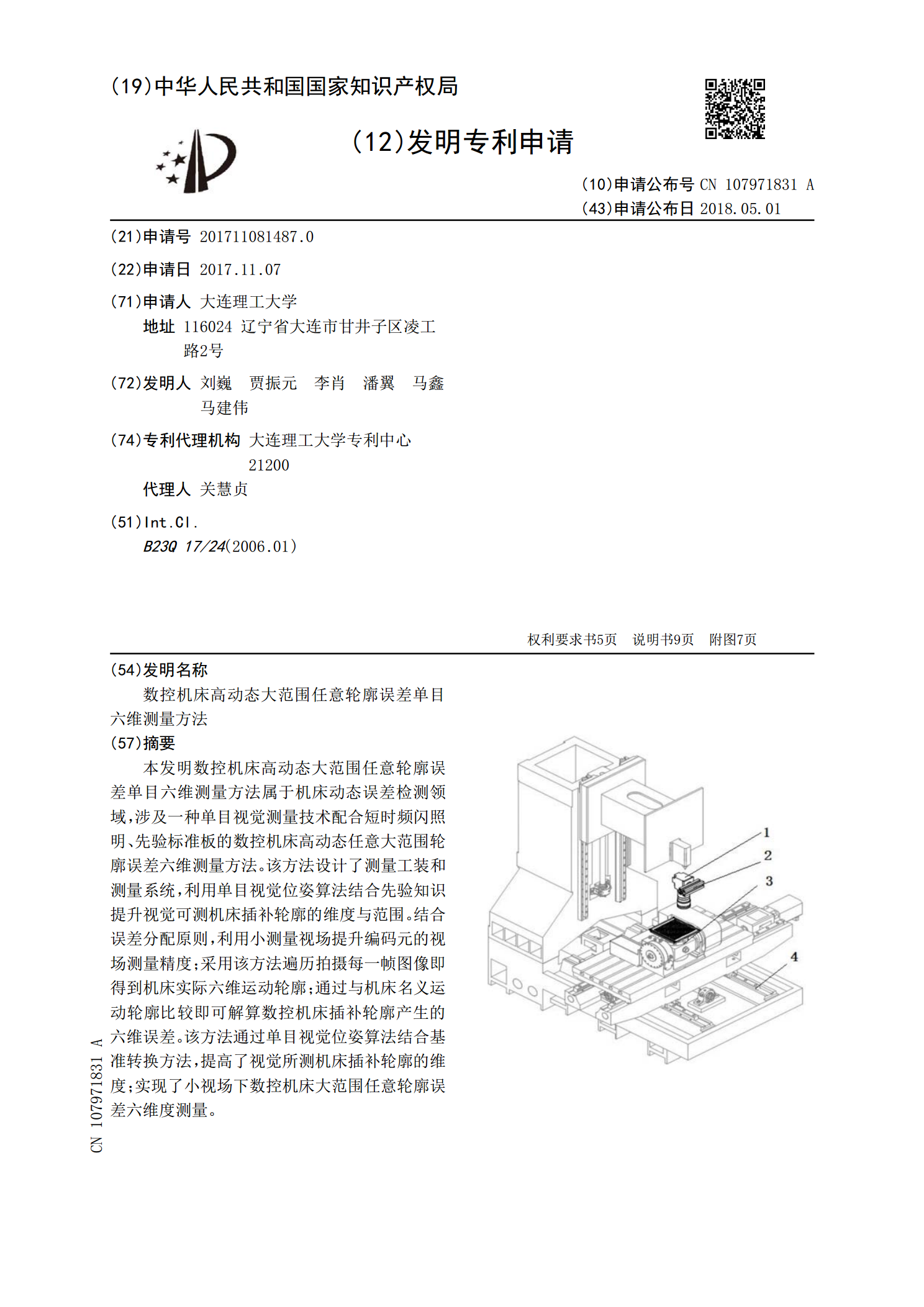
本发明数控机床高动态大范围任意轮廓误差单目六维测量方法属于机床动态误差检测领域,涉及一种单目视觉测量技术配合短时频闪照明、先验标准板的数控机床高动态任意大范围轮廓误差六维测量方法。该方法设计了测量工装和测量系统,利用单目视觉位姿算法结合先验知识提升视觉可测机床插补轮廓的维度与范围。结合误差分配原则,利用小测量视场提升编码元的视场测量精度;采用该方法遍历拍摄每一帧图像即得到机床实际六维运动轮廓;通过与机床名义运动轮廓比较即可解算数控机床插补轮廓产生的六维误差。该方法通过单目视觉位姿算法结合基准转换方法,提高

基于单目立体视觉的机床几何误差辨识方法.docx
基于单目立体视觉的机床几何误差辨识方法基于单目立体视觉的机床几何误差辨识方法摘要:机床几何误差是影响机床精度的主要原因之一。本文提出了一种基于单目立体视觉的机床几何误差辨识方法,通过视觉测量得到工件对机床基准面的实际位置,再与理论设计值比较,可以判断机床的误差情况,从而提高机床精度。关键词:单目立体视觉、机床几何误差、误差辨识、精度一、引言现代制造业的发展越来越需要高精度的加工设备,机床作为一种重要的加工设备,其精度影响着加工成品的质量。机床的几何误差是影响机床精度的主要原因之一,因此几何误差辨识是提高机

基于单目显微视觉的微球姿态测量方法.docx
基于单目显微视觉的微球姿态测量方法基于单目显微视觉的微球姿态测量方法摘要本文介绍了一种基于单目显微视觉的微球姿态测量方法。该方法通过分析球的图像特征来计算出球的姿态角度,准确度高,可应用于纳米粒子的研究。关键词:单目显微视觉,微球姿态测量,图像处理,粒子分析引言微球是微纳米领域中常用的粒子。研究微球的姿态可以得到关于微观结构和物质性质的信息。因此,发展一种可靠的微球姿态测量方法是非常重要的。目前已有不少研究采用了基于双目或多目相机的姿态测量方法。然而,由于设备复杂,价格昂贵,这些方法并不适用于低成本的研究
一种数控机床动态轮廓误差视觉测量装置.pdf
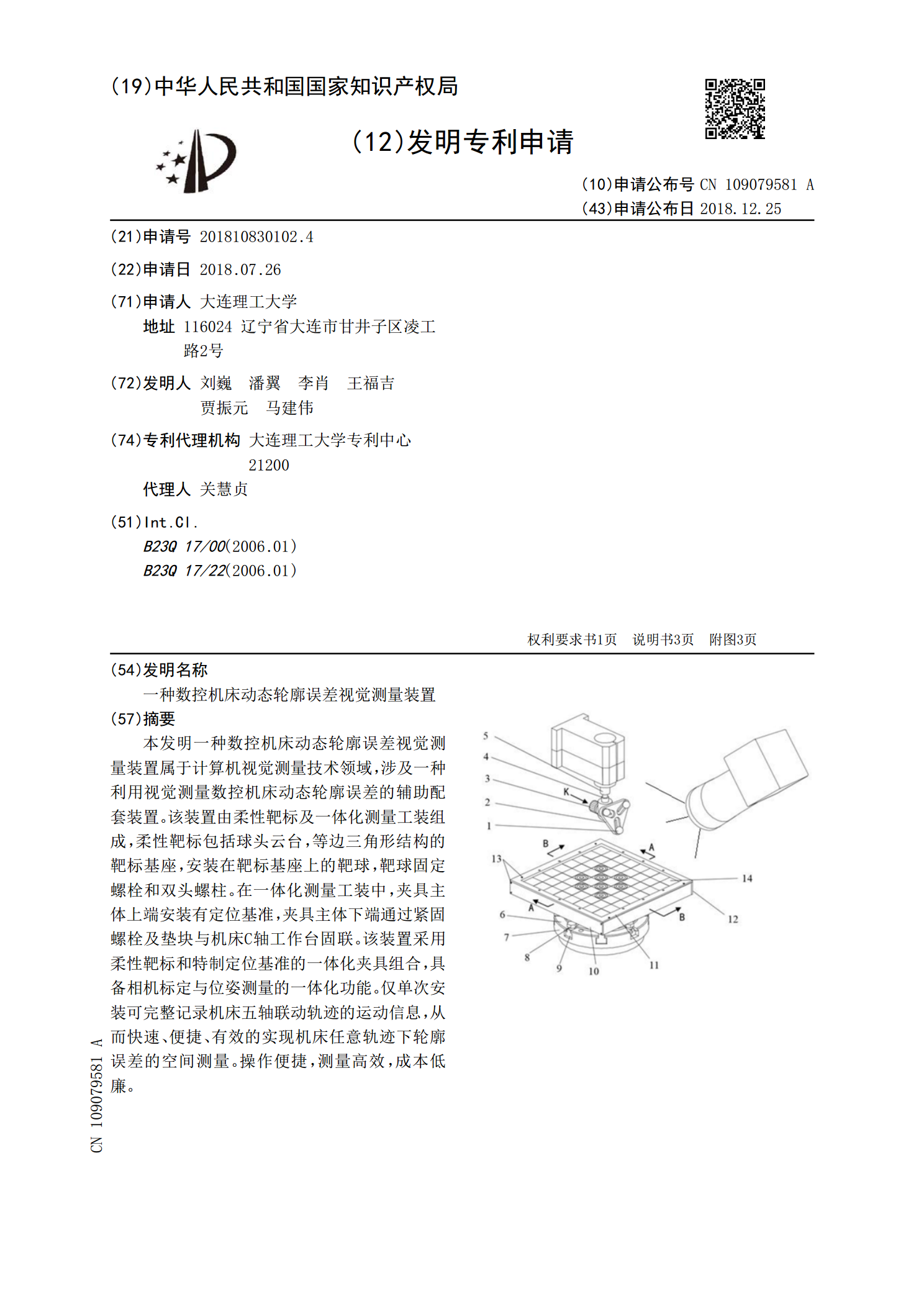
本发明一种数控机床动态轮廓误差视觉测量装置属于计算机视觉测量技术领域,涉及一种利用视觉测量数控机床动态轮廓误差的辅助配套装置。该装置由柔性靶标及一体化测量工装组成,柔性靶标包括球头云台,等边三角形结构的靶标基座,安装在靶标基座上的靶球,靶球固定螺栓和双头螺柱。在一体化测量工装中,夹具主体上端安装有定位基准,夹具主体下端通过紧固螺栓及垫块与机床C轴工作台固联。该装置采用柔性靶标和特制定位基准的一体化夹具组合,具备相机标定与位姿测量的一体化功能。仅单次安装可完整记录机床五轴联动轨迹的运动信息,从而快速、便捷、