
数控机床高动态大范围任意轮廓误差单目六维测量方法.pdf

是你****芹呀

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
数控机床高动态大范围任意轮廓误差单目六维测量方法.pdf
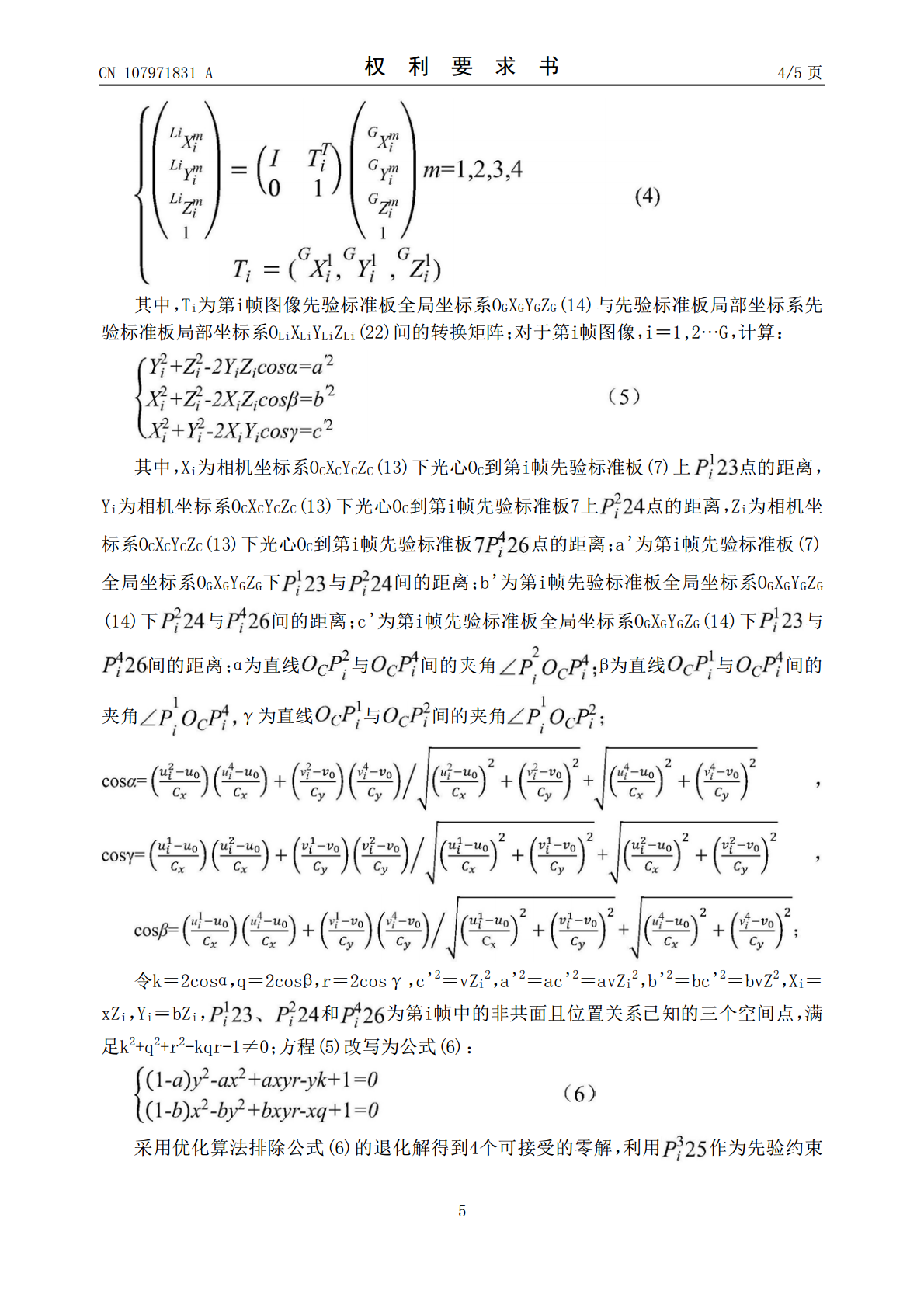
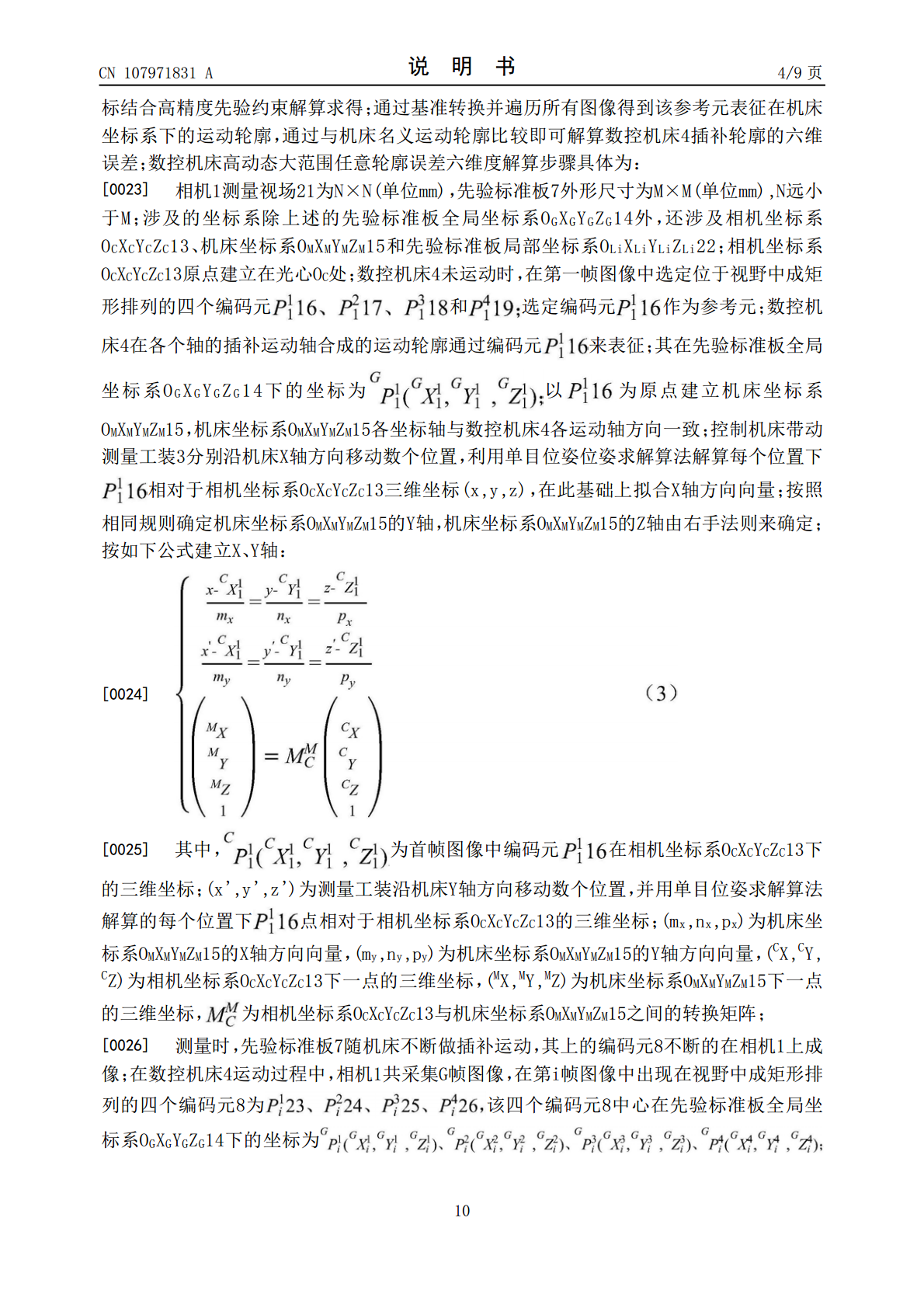
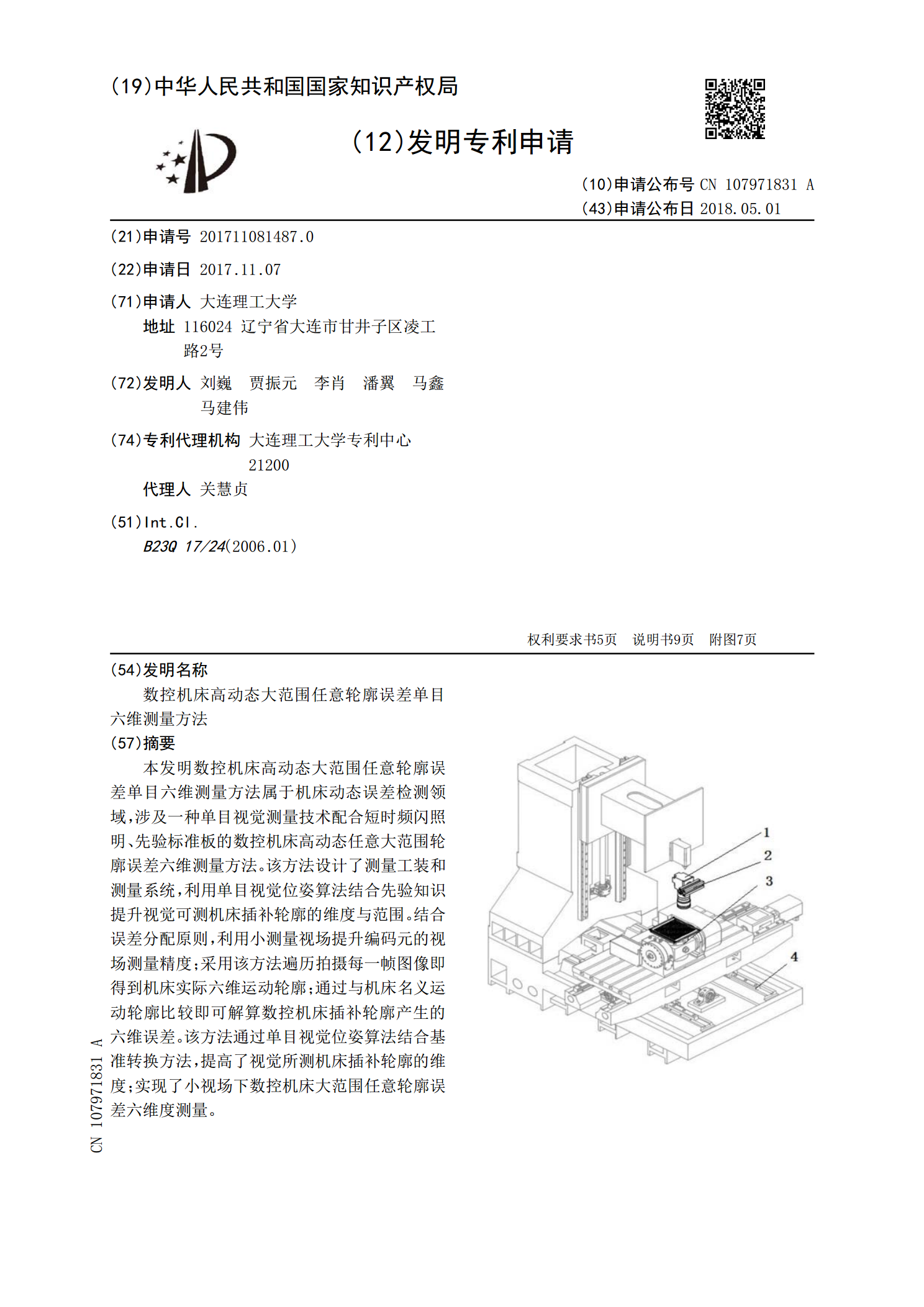
本发明数控机床高动态大范围任意轮廓误差单目六维测量方法属于机床动态误差检测领域,涉及一种单目视觉测量技术配合短时频闪照明、先验标准板的数控机床高动态任意大范围轮廓误差六维测量方法。该方法设计了测量工装和测量系统,利用单目视觉位姿算法结合先验知识提升视觉可测机床插补轮廓的维度与范围。结合误差分配原则,利用小测量视场提升编码元的视场测量精度;采用该方法遍历拍摄每一帧图像即得到机床实际六维运动轮廓;通过与机床名义运动轮廓比较即可解算数控机床插补轮廓产生的六维误差。该方法通过单目视觉位姿算法结合基准转换方法,提高

基于单目视觉的数控机床轮廓误差三维测量方法.pdf
本发明基于单目视觉的数控机床轮廓误差三维测量方法属于计算机视觉测量技术领域,涉及一种基于单目视觉的轮廓误差数控机床三维测量方法。该方法首先将单目相机安装在测量系统安装架上,并位于机床工作台的斜上方。结合张正友标定法与高精度棋盘格标定板,标定单目相机的内参数与畸变参数。标定后安装测量基准,驱使机床运行生成动态轨迹,同时触发单目相机拍摄测量基准上的四个编码点的运动序列图像,利用迭代算法对每帧图像进行数据处理计算基准点空间坐标,将处理算法遍历每帧图像后连接基准点即可得到相机坐标系下机床运动轨迹。随后将此轨迹投影
一种数控机床动态轮廓误差视觉测量装置.pdf
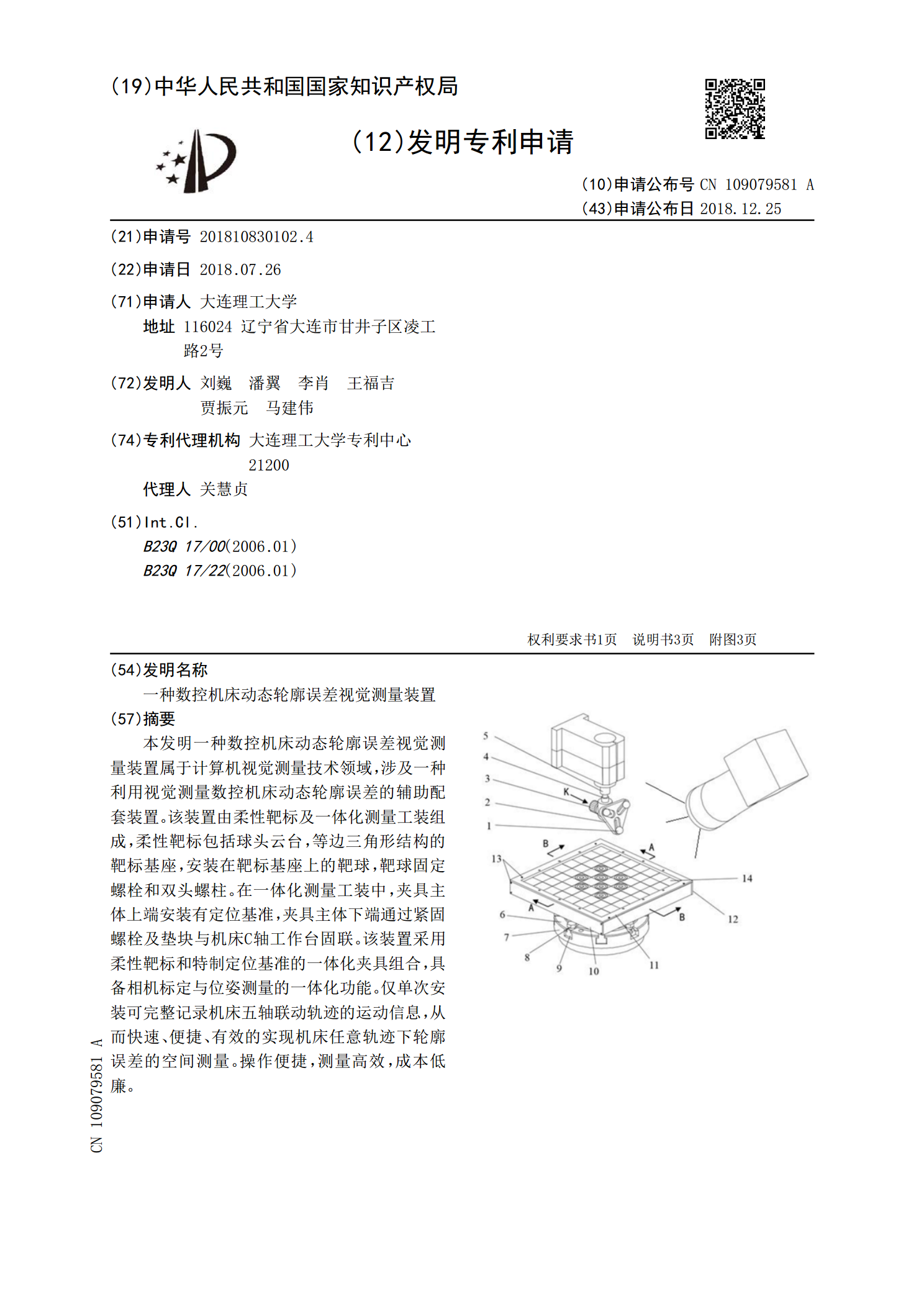
本发明一种数控机床动态轮廓误差视觉测量装置属于计算机视觉测量技术领域,涉及一种利用视觉测量数控机床动态轮廓误差的辅助配套装置。该装置由柔性靶标及一体化测量工装组成,柔性靶标包括球头云台,等边三角形结构的靶标基座,安装在靶标基座上的靶球,靶球固定螺栓和双头螺柱。在一体化测量工装中,夹具主体上端安装有定位基准,夹具主体下端通过紧固螺栓及垫块与机床C轴工作台固联。该装置采用柔性靶标和特制定位基准的一体化夹具组合,具备相机标定与位姿测量的一体化功能。仅单次安装可完整记录机床五轴联动轨迹的运动信息,从而快速、便捷、
一种机床平面轮廓误差单目测量方法.pdf
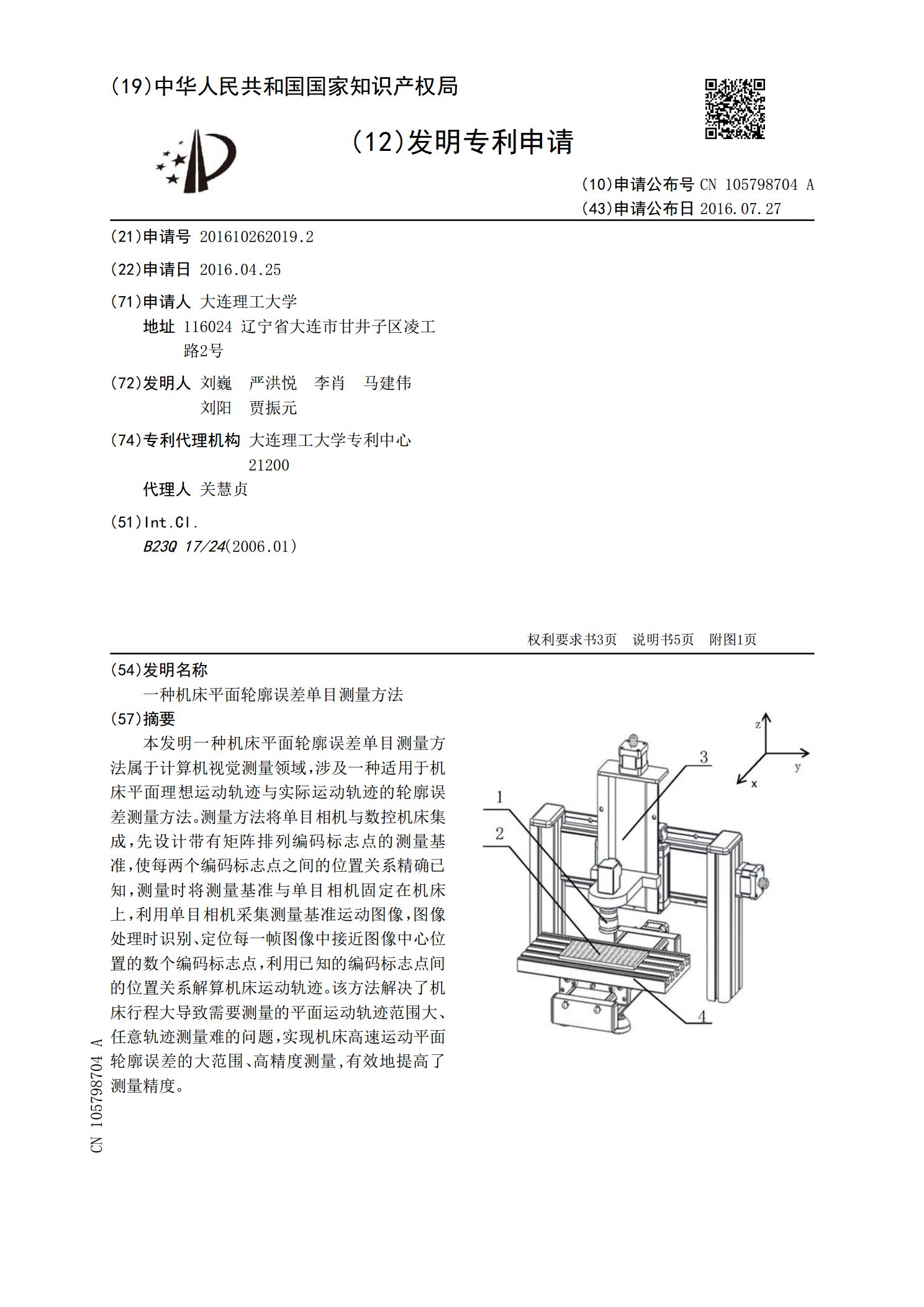
本发明一种机床平面轮廓误差单目测量方法属于计算机视觉测量领域,涉及一种适用于机床平面理想运动轨迹与实际运动轨迹的轮廓误差测量方法。测量方法将单目相机与数控机床集成,先设计带有矩阵排列编码标志点的测量基准,使每两个编码标志点之间的位置关系精确已知,测量时将测量基准与单目相机固定在机床上,利用单目相机采集测量基准运动图像,图像处理时识别、定位每一帧图像中接近图像中心位置的数个编码标志点,利用已知的编码标志点间的位置关系解算机床运动轨迹。该方法解决了机床行程大导致需要测量的平面运动轨迹范围大、任意轨迹测量难的问

基于内置传感器的数控机床动态加工误差测量方法.docx
基于内置传感器的数控机床动态加工误差测量方法基于内置传感器的数控机床动态加工误差测量方法摘要:数控机床作为现代制造业的核心设备之一,其加工精度和稳定性对于产品质量和生产效率具有重要影响。因此,准确测量数控机床的动态加工误差对于实现高精度加工具有关键作用。本文提出了一种基于内置传感器的数控机床动态加工误差测量方法,该方法通过利用内置传感器获取顶点位置信息和反馈信号,实时监测加工误差并进行修正,从而提高加工精度和稳定性。实验结果表明,该方法能够有效地测量数控机床的动态加工误差,并且具有较高的精度和可靠性。关键