
一种脱离基准平面的平面度误差测量方法.pdf

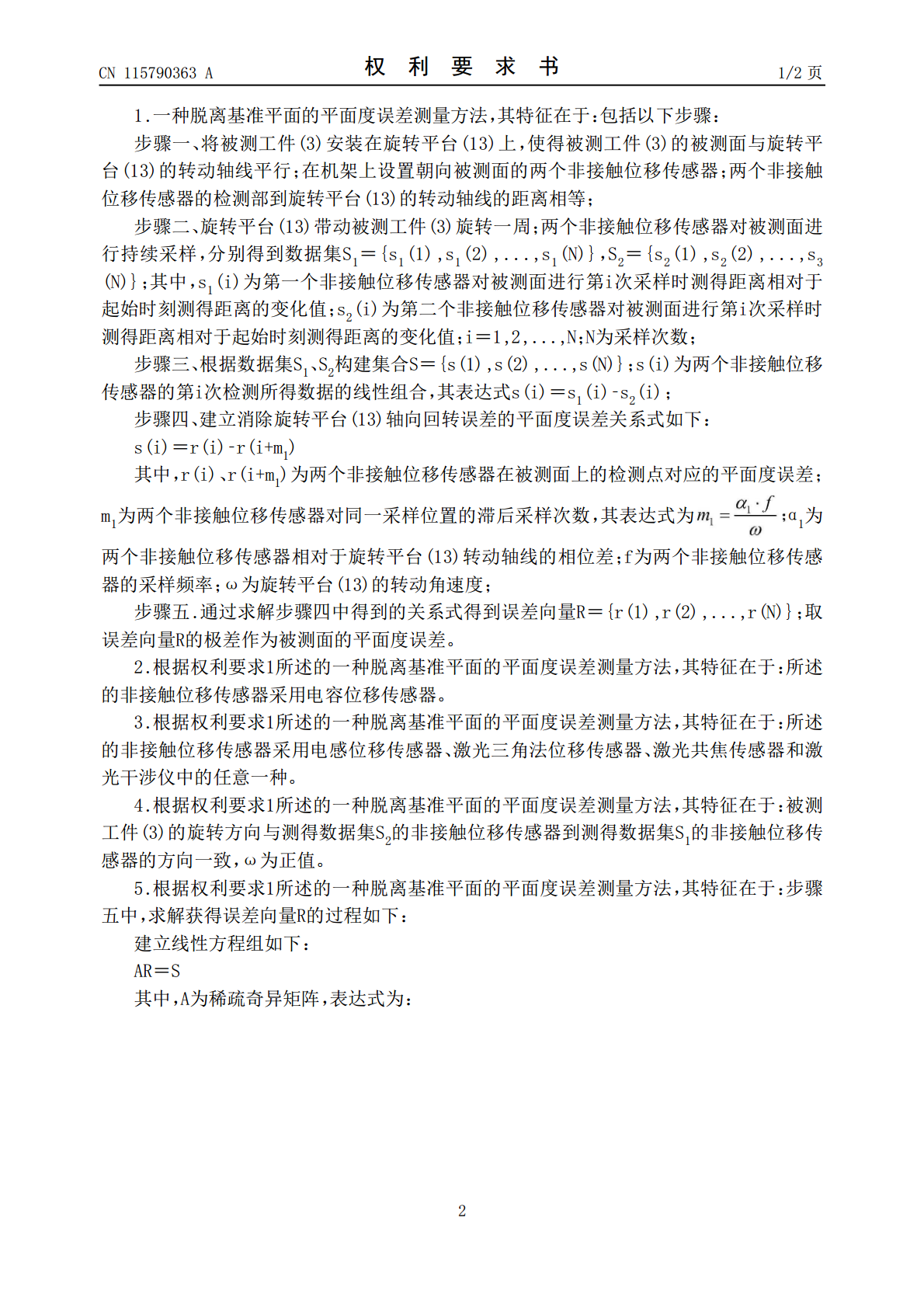
诗文****仙女


1/10
2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种脱离基准平面的平面度误差测量方法.pdf
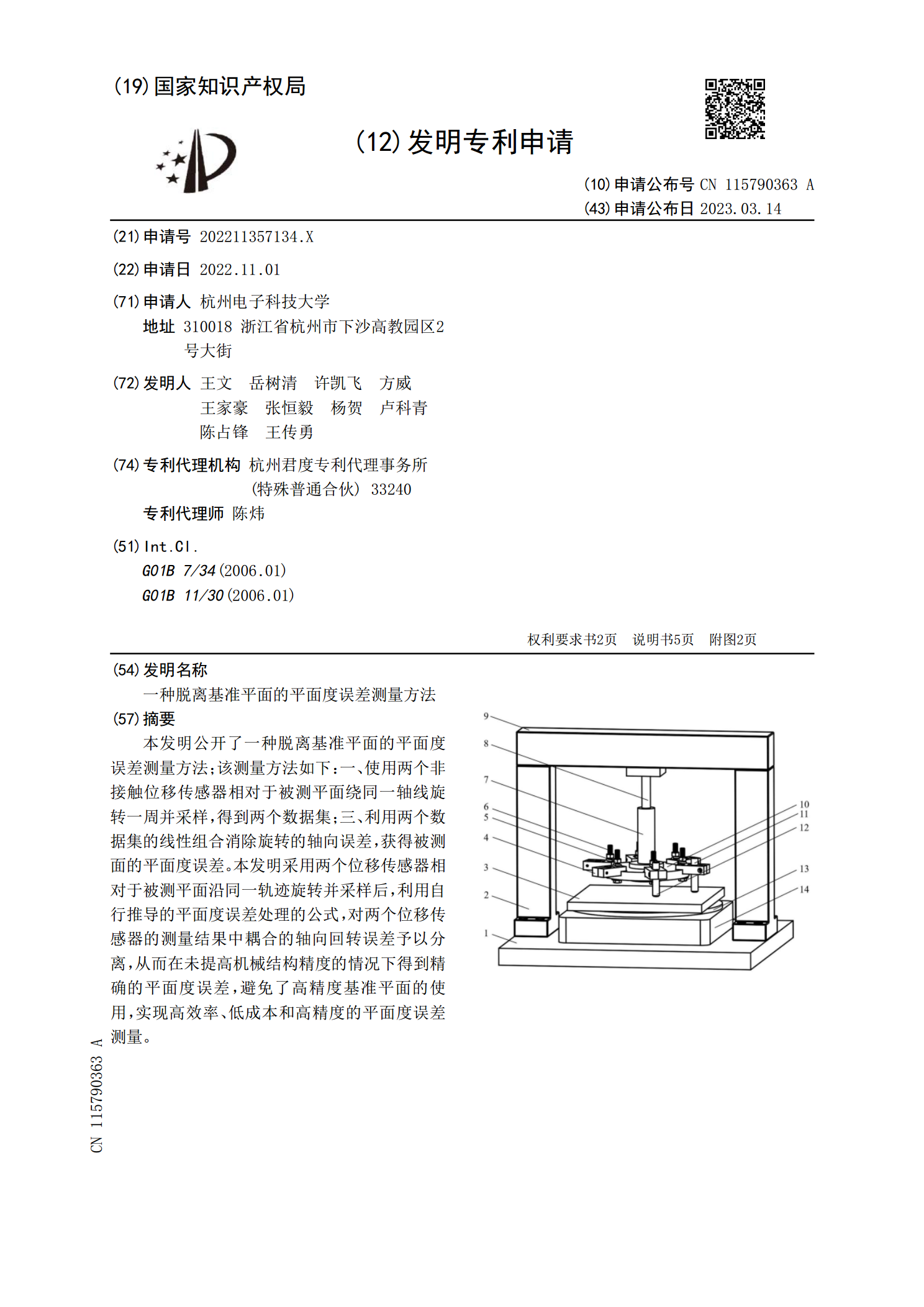
本发明公开了一种脱离基准平面的平面度误差测量方法;该测量方法如下:一、使用两个非接触位移传感器相对于被测平面绕同一轴线旋转一周并采样,得到两个数据集;三、利用两个数据集的线性组合消除旋转的轴向误差,获得被测面的平面度误差。本发明采用两个位移传感器相对于被测平面沿同一轨迹旋转并采样后,利用自行推导的平面度误差处理的公式,对两个位移传感器的测量结果中耦合的轴向回转误差予以分离,从而在未提高机械结构精度的情况下得到精确的平面度误差,避免了高精度基准平面的使用,实现高效率、低成本和高精度的平面度误差测量。

平面度测量方法误差分析.docx
平面度测量方法误差分析平面度测量是工程领域中一项非常重要的测量工作,它用于检测物体表面的平整度,以评估物体表面的质量和性能。在实际测量中,由于各种原因,如仪器设备误差、环境干扰等,可能会引入一定的误差。因此,误差分析是非常必要的,它可以帮助我们更好地理解测量结果的可靠性和准确性,从而采取相应的改进措施。首先,介绍平面度测量的基本原理。平面度是指在某个表面上选择一个基准面,然后计算该表面上其他点与基准面之间的距离差异。测量平面度的常用方法有激光干涉仪、投影仪、坐标测量机等。不同的测量方法有其各自的优缺点和适

一种基于液面基准的大平面平面度测量方法的研究.docx
一种基于液面基准的大平面平面度测量方法的研究摘要本文基于液面基准原理,研究了一种大平面平面度测量方法。通过建立液面基准,并使用倾斜仪器、水准仪器和测量工具,实现了对大平面平面度的准确测量。实验结果表明,该方法具有较高的准确性和重复性,可广泛应用于工程实践中。关键词:液面基准,大平面,平面度测量引言大平面的平面度测量一直是工业制造和加工中的一个重要环节。大平面平面度是指大平面表面的平整程度,即大平面与一理想平面接触时的接触点数,通常用于测试平坦的表面,如机床、平台等。大平面平面度对产品的精度、质量和稳定性具

关于定位基准平面度误差对定位误差影响的试验研究.docx
关于定位基准平面度误差对定位误差影响的试验研究一、研究背景定位基准平面度误差对于机械结构的影响是一个较为复杂的问题。目前很多工程应用中关于定位基准的研究主要集中在平面度的测量方法,如利用平面度测量仪等,然而对于其误差对于整个定位系统的影响研究较为薄弱。本文主要通过实验研究来探究定位基准平面度误差对于定位精度的影响,分析误差来源,为实际工程应用提供参考依据。二、实验方法1.实验材料本次实验采用的定位系统为二维定位平台,定位平台材质为铸铝铁,定位平台总面积为500mmx500mmx80mm,可承受最大载重70

一种基于液面基准的大平面平面度测量方法的研究的任务书.docx
一种基于液面基准的大平面平面度测量方法的研究的任务书任务书1.研究背景大平面的平面度是指平面内各点与某一基准面之间的高度差的最大值,是评价板面质量的重要指标之一。目前,常见的大平面平面度测量方法包括曲率半径法、投影仪法、激光干涉法等,但这些方法存在一些问题,如操作复杂、成本高昂等,无法应用于一些要求较高的实际应用场景。因此,本研究旨在探索一种基于液面基准的大平面平面度测量方法,提高测量精度和准确性,拓展实际应用场景,具有一定的创新性和实用价值。2.研究目的本研究的主要目的为:①设计并制作基于液面基准的大平