
发动机相位检测装置及检测系统.pdf

森林****来了

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
发动机相位检测装置及检测系统.pdf
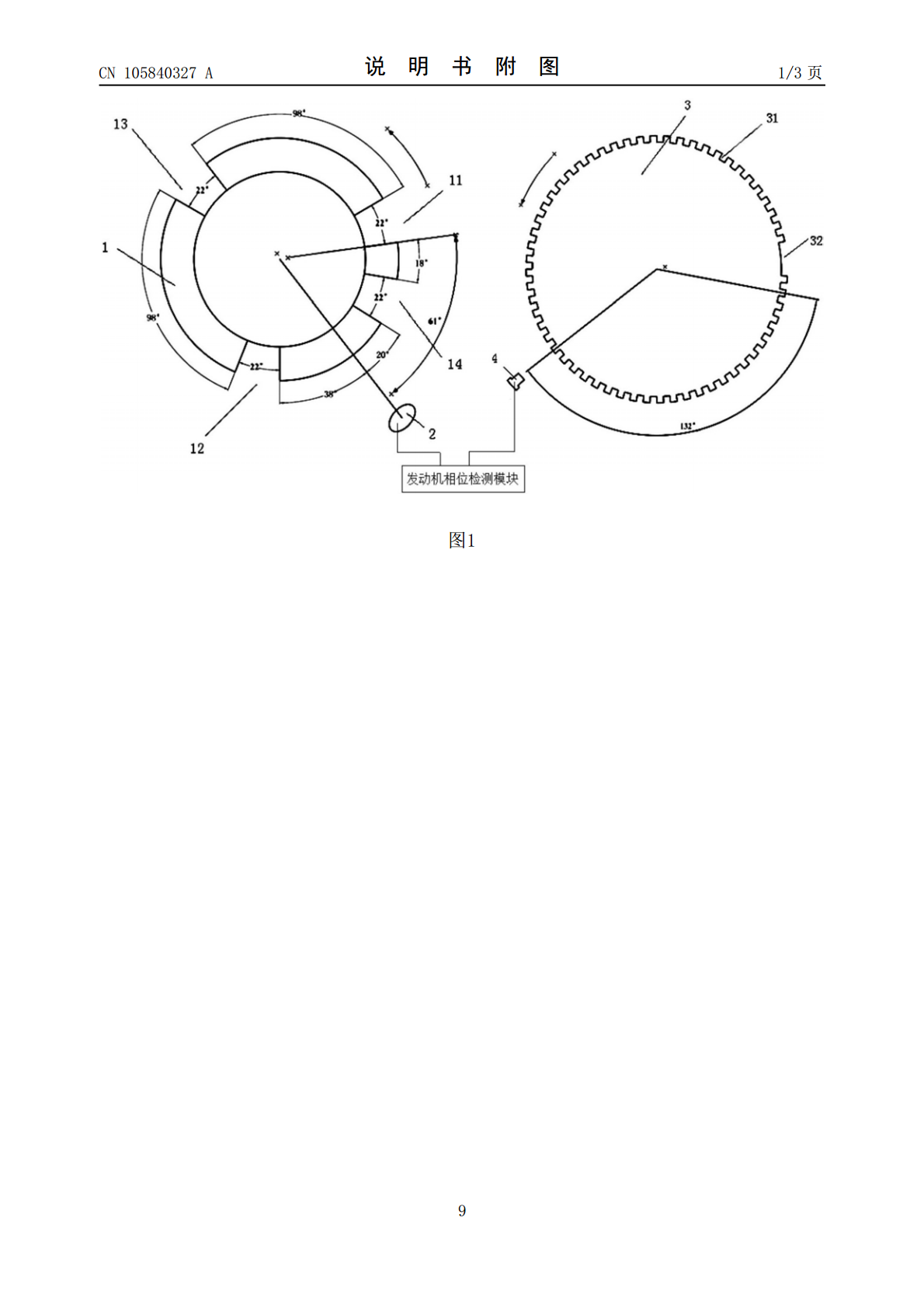
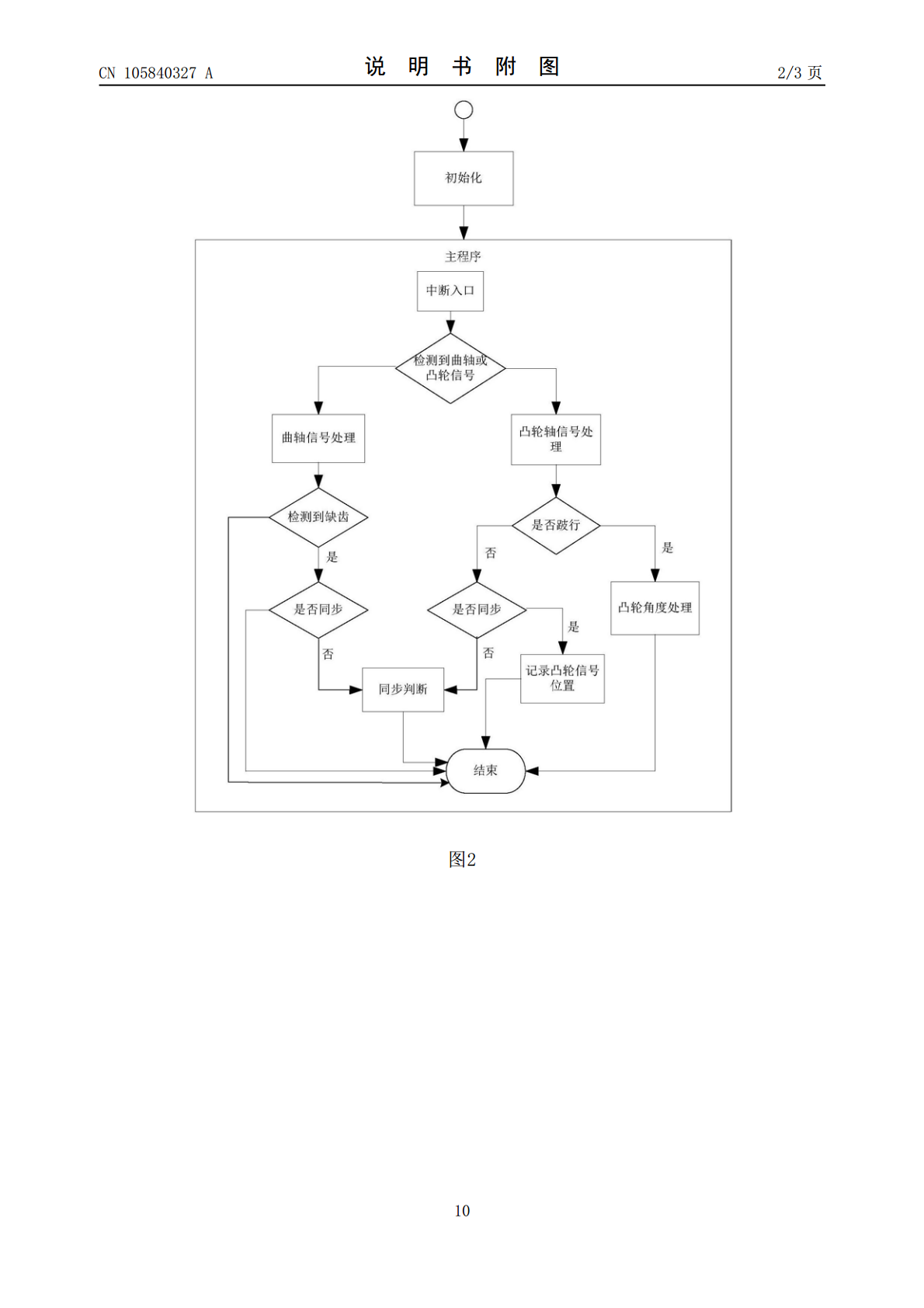
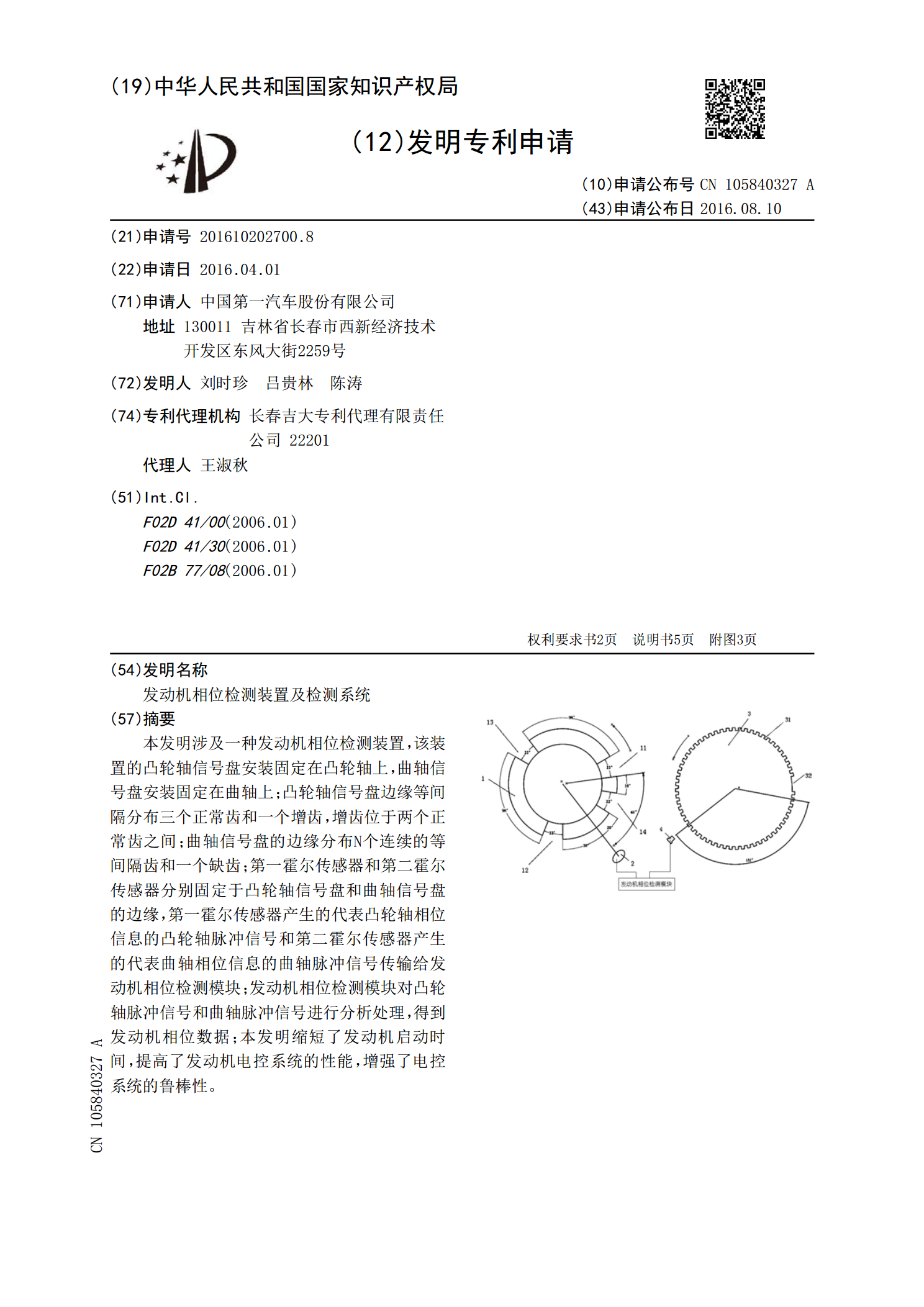
本发明涉及一种发动机相位检测装置,该装置的凸轮轴信号盘安装固定在凸轮轴上,曲轴信号盘安装固定在曲轴上;凸轮轴信号盘边缘等间隔分布三个正常齿和一个增齿,增齿位于两个正常齿之间;曲轴信号盘的边缘分布N个连续的等间隔齿和一个缺齿;第一霍尔传感器和第二霍尔传感器分别固定于凸轮轴信号盘和曲轴信号盘的边缘,第一霍尔传感器产生的代表凸轮轴相位信息的凸轮轴脉冲信号和第二霍尔传感器产生的代表曲轴相位信息的曲轴脉冲信号传输给发动机相位检测模块;发动机相位检测模块对凸轮轴脉冲信号和曲轴脉冲信号进行分析处理,得到发动机相位数据;

发动机相位偏差检测装置及其方法.pdf
本发明公开了一种发动机相位偏差检测装置,包括用于检测飞轮转速的转速传感器、用于安装相位传感器的安装孔和设在凸轮轴上的信号盘,所述的信号盘包括本体,所述的本体上设有第一大齿、第二大齿、第一小齿、第二小齿四个齿,所述的第一大齿、第二大齿、第一小齿、第二小齿依序沿本体周向分布,所述的第一大齿靠近第二小齿的面为前端面;它还包括与安装孔滑动配合且前端设有可与前端面贴合的金属片的辅助检测机构和用于读取飞轮上的基准齿与转速传感器中心线对应的齿之间角度的角度盘,所述的辅助检测机构还包括外凸于相位传感器安装孔的止推头。该装
汽车发动机可变气门正时系统相位检测和控制装置.pdf
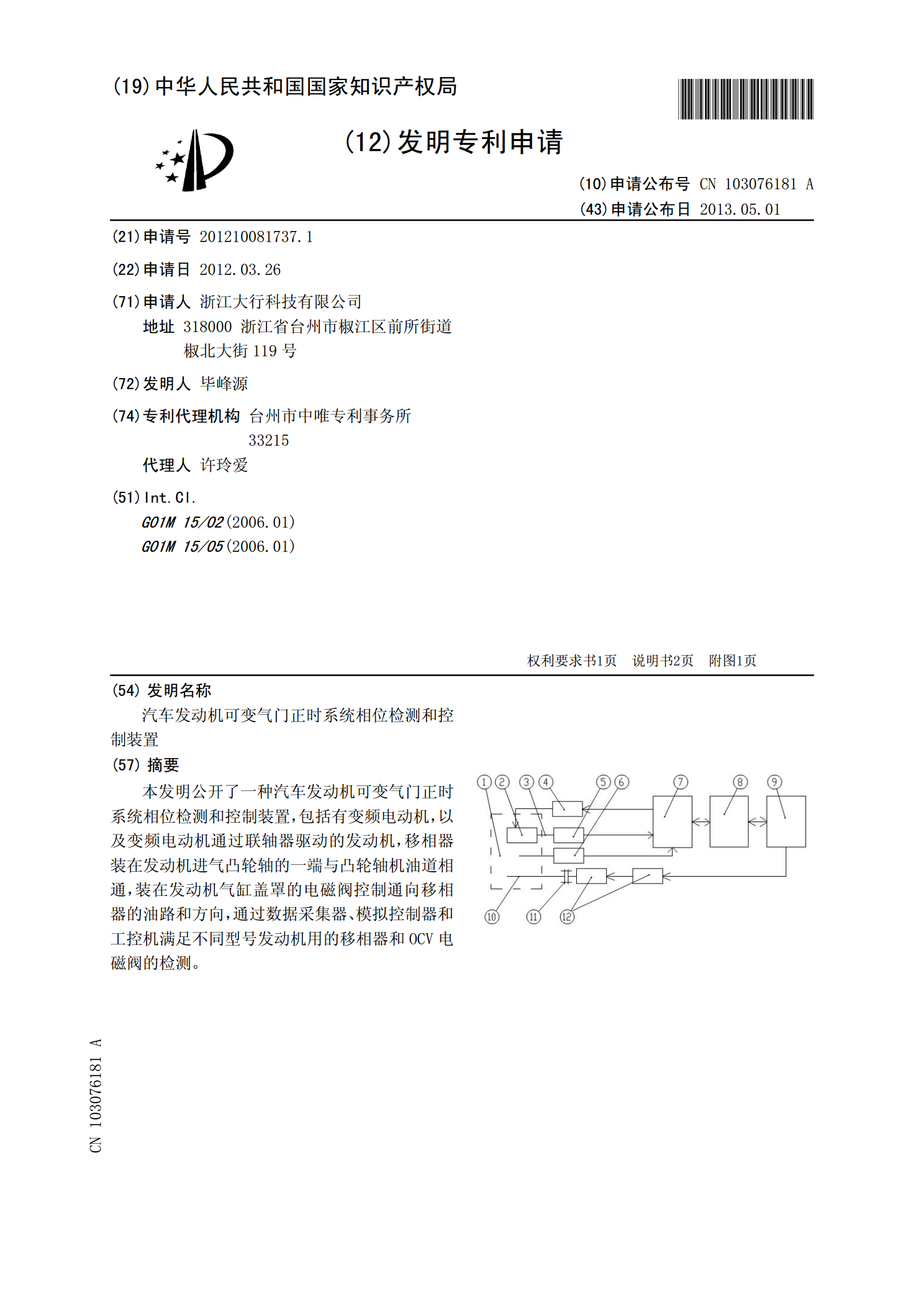
本发明公开了一种汽车发动机可变气门正时系统相位检测和控制装置,包括有变频电动机,以及变频电动机通过联轴器驱动的发动机,移相器装在发动机进气凸轮轴的一端与凸轮轴机油道相通,装在发动机气缸盖罩的电磁阀控制通向移相器的油路和方向,通过数据采集器、模拟控制器和工控机满足不同型号发动机用的移相器和OCV电磁阀的检测。
一种发动机配气相位检测装置及方法.pdf
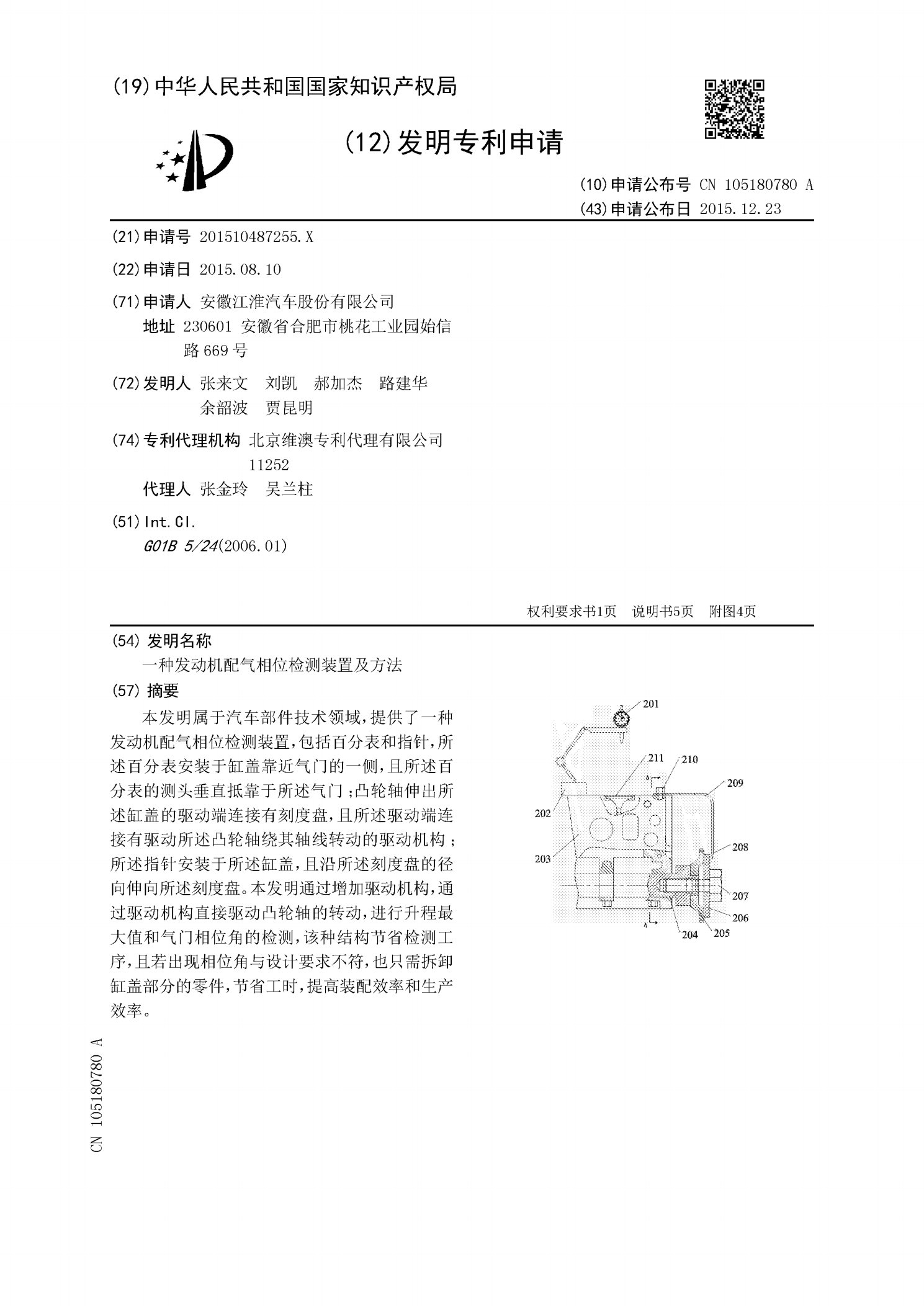
本发明属于汽车部件技术领域,提供了一种发动机配气相位检测装置,包括百分表和指针,所述百分表安装于缸盖靠近气门的一侧,且所述百分表的测头垂直抵靠于所述气门;凸轮轴伸出所述缸盖的驱动端连接有刻度盘,且所述驱动端连接有驱动所述凸轮轴绕其轴线转动的驱动机构;所述指针安装于所述缸盖,且沿所述刻度盘的径向伸向所述刻度盘。本发明通过增加驱动机构,通过驱动机构直接驱动凸轮轴的转动,进行升程最大值和气门相位角的检测,该种结构节省检测工序,且若出现相位角与设计要求不符,也只需拆卸缸盖部分的零件,节省工时,提高装配效率和生产效

一种均质压燃发动机燃烧相位的检测装置及其检测方法.pdf
本发明涉及一种均质压燃发动机燃烧相位的检测装置及其检测方法,它包括:一转速传感器,其采集发动机的飞轮的转速信号;一凸轮轴位置传感器,其采集发动机的凸轮轴相位;一加速度传感器,其采集发动机的振动信号;一电荷放大器,其将采集到的发动机振动信号由电荷信号转换为电压信号;一数据采集设备,其对输入的发动机的飞轮转速信号、凸轮轴相位和振动信号进行模数转换;一上位机,其根据经模数转换后的发动机的飞轮转速信号、凸轮轴相位和振动信号的数字信号,标定出发动机的燃烧分析窗口和燃烧特征频率带;一燃烧分析控制单元,其根据燃烧分析窗