
一种重载移载机器人.pdf

小代****回来


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种重载移载机器人.pdf
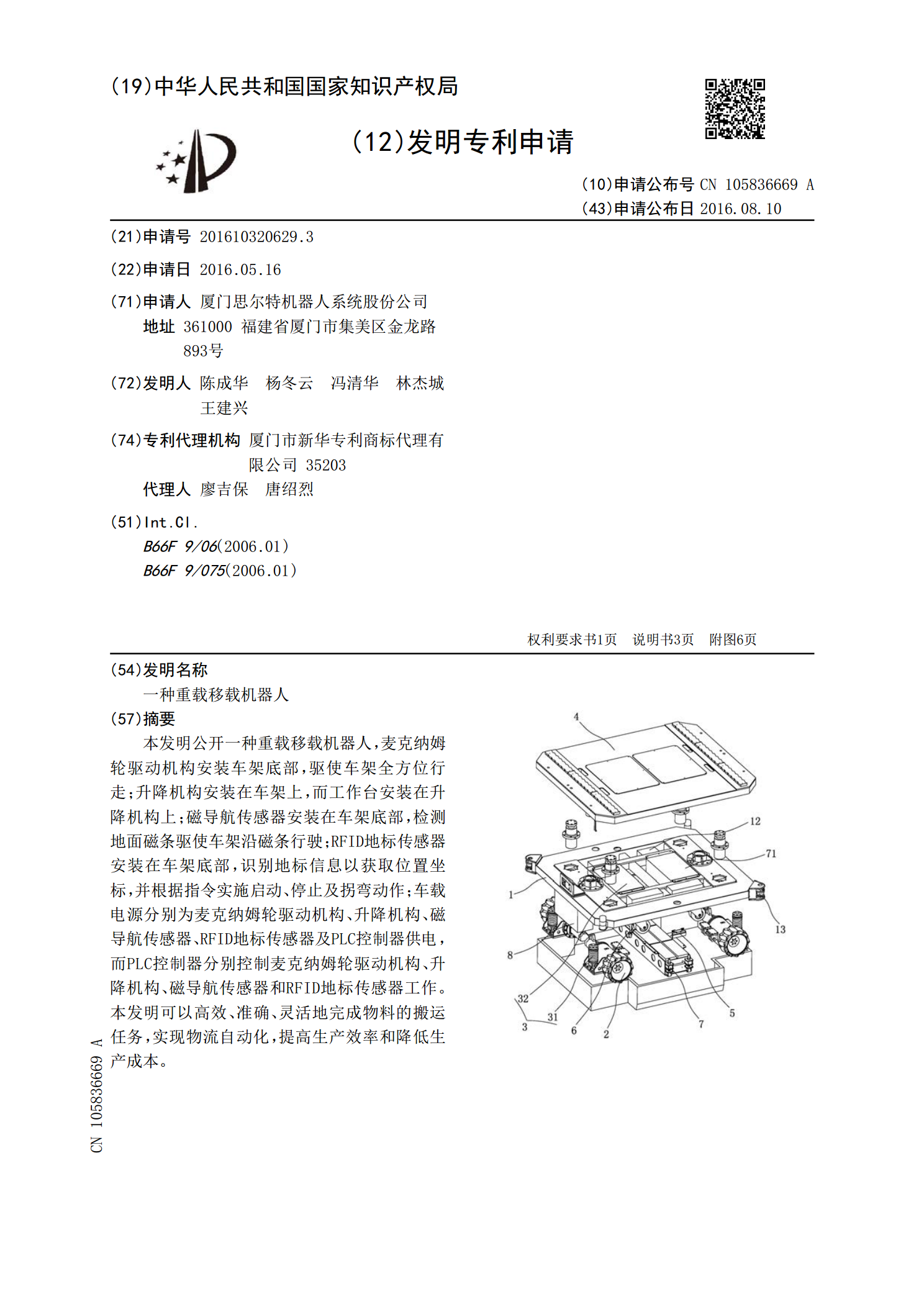
本发明公开一种重载移载机器人,麦克纳姆轮驱动机构安装车架底部,驱使车架全方位行走;升降机构安装在车架上,而工作台安装在升降机构上;磁导航传感器安装在车架底部,检测地面磁条驱使车架沿磁条行驶;RFID地标传感器安装在车架底部,识别地标信息以获取位置坐标,并根据指令实施启动、停止及拐弯动作;车载电源分别为麦克纳姆轮驱动机构、升降机构、磁导航传感器、RFID地标传感器及PLC控制器供电,而PLC控制器分别控制麦克纳姆轮驱动机构、升降机构、磁导航传感器和RFID地标传感器工作。本发明可以高效、准确、灵活地完成物料
一种机器人智能移载装置.pdf
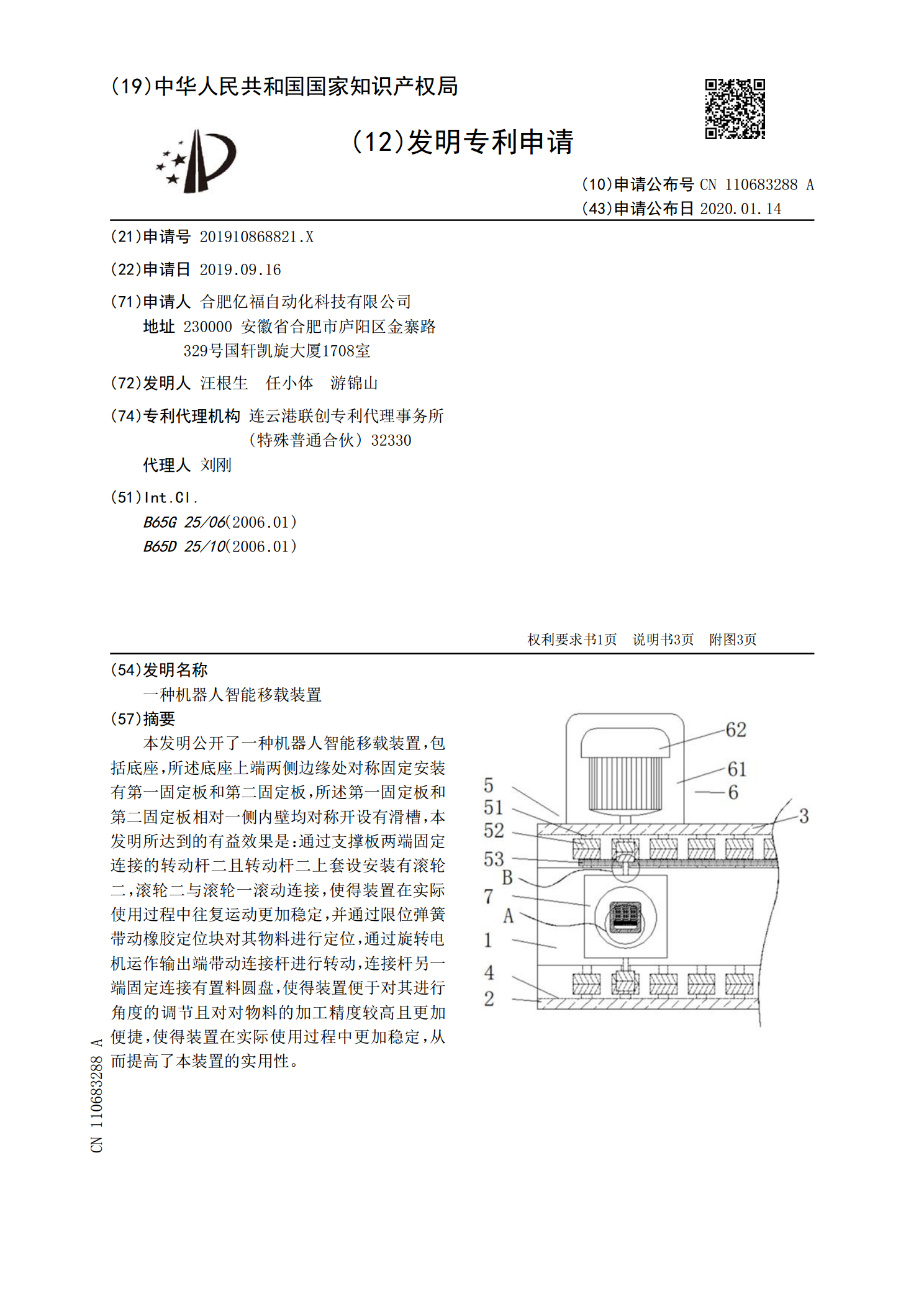
本发明公开了一种机器人智能移载装置,包括底座,所述底座上端两侧边缘处对称固定安装有第一固定板和第二固定板,所述第一固定板和第二固定板相对一侧内壁均对称开设有滑槽,本发明所达到的有益效果是:通过支撑板两端固定连接的转动杆二且转动杆二上套设安装有滚轮二,滚轮二与滚轮一滚动连接,使得装置在实际使用过程中往复运动更加稳定,并通过限位弹簧带动橡胶定位块对其物料进行定位,通过旋转电机运作输出端带动连接杆进行转动,连接杆另一端固定连接有置料圆盘,使得装置便于对其进行角度的调节且对对物料的加工精度较高且更加便捷,使得装置

一种自动移载码垛机器人.pdf
本发明涉及一种自动移载码垛机器人,包括底座、龙门支撑架、导轨、真空吸盘总成、横梁运行小车、立导轨、横梁小车电缆、横梁小车电缆托架、第一电机和电气控制柜,导轨平铺在龙门支撑架顶部,横梁运行小车通过第一电机和横梁小车电缆沿着导轨来回运行,横梁小车电缆设于横梁小车电缆托架内,立导轨竖直设于横梁运行小车上,真空吸盘总成设于立导轨上,真空吸盘总成包括真空泵总成、吸盘座、以及防碰撞组件、定位组件、电子称重器、支撑架和真空组件,真空泵总成设于立导轨上且位于龙门支撑架顶部;吸盘座上开设有若干气孔,气孔连通真空组件,吸盘座
一种移载装置及利用该移载装置完成移载过程的移载方法.pdf
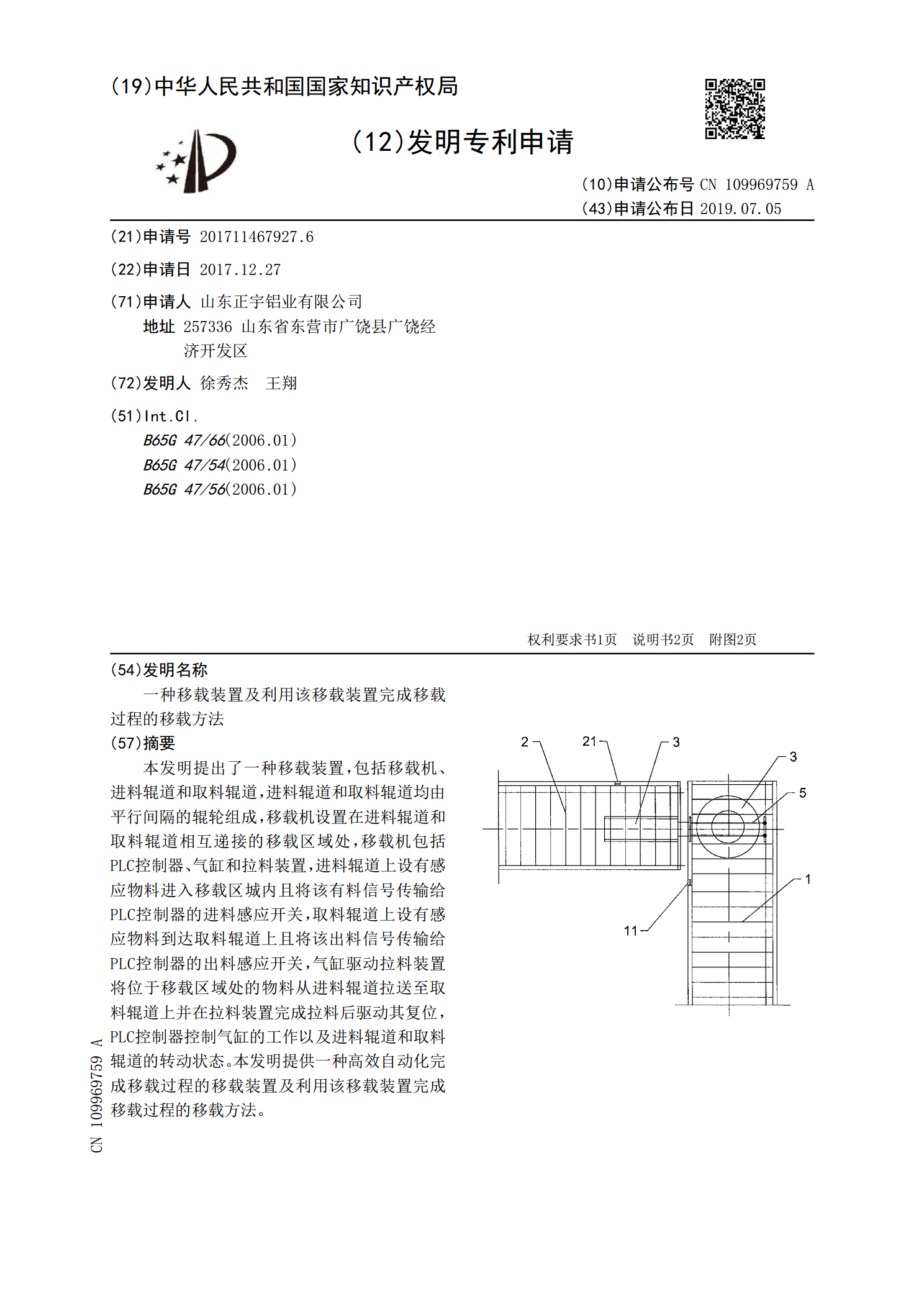
本发明提出了一种移载装置,包括移载机、进料辊道和取料辊道,进料辊道和取料辊道均由平行间隔的辊轮组成,移载机设置在进料辊道和取料辊道相互递接的移载区域处,移载机包括PLC控制器、气缸和拉料装置,进料辊道上设有感应物料进入移载区城内且将该有料信号传输给PLC控制器的进料感应开关,取料辊道上设有感应物料到达取料辊道上且将该出料信号传输给PLC控制器的出料感应开关,气缸驱动拉料装置将位于移载区域处的物料从进料辊道拉送至取料辊道上并在拉料装置完成拉料后驱动其复位,PLC控制器控制气缸的工作以及进料辊道和取料辊道的转
一种重载移止支撑机构.pdf
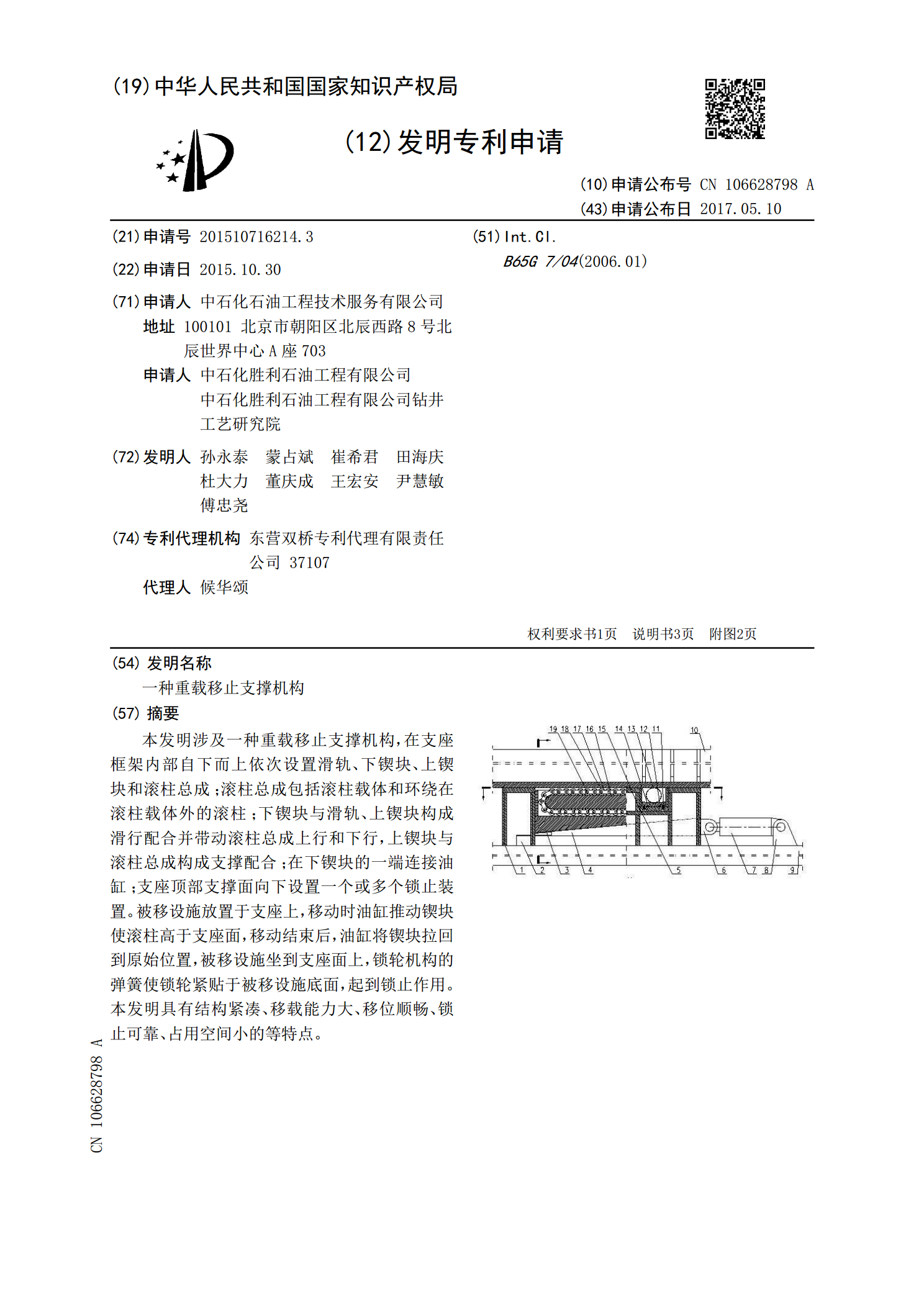
本发明涉及一种重载移止支撑机构,在支座框架内部自下而上依次设置滑轨、下锲块、上锲块和滚柱总成;滚柱总成包括滚柱载体和环绕在滚柱载体外的滚柱;下锲块与滑轨、上锲块构成滑行配合并带动滚柱总成上行和下行,上锲块与滚柱总成构成支撑配合;在下锲块的一端连接油缸;支座顶部支撑面向下设置一个或多个锁止装置。被移设施放置于支座上,移动时油缸推动锲块使滚柱高于支座面,移动结束后,油缸将锲块拉回到原始位置,被移设施坐到支座面上,锁轮机构的弹簧使锁轮紧贴于被移设施底面,起到锁止作用。本发明具有结构紧凑、移载能力大、移位顺畅、锁